
Fターム[5L096FA23]の内容
Fターム[5L096FA23]に分類される特許
81 - 100 / 273
自然由来柄の定量的評価方法、並びにその印象制御による自然由来柄の創成方法および創成システム
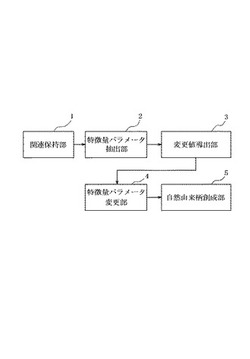
【課題】合理的かつ安価な方法で、自然由来柄を定量的に評価できる方法、並びに自然由来柄の印象を定量的に制御可能な方法およびシステムを得ること。
【解決手段】複数試料について、中屋変法による一対比較法で評価した複数評価項目の平均評価値と、各試料のパワースペクトル画像から抽出した特徴量パラメータ(特徴量)と有意に相関する操作可能評価項目と特徴量との関連を保持する関連保持部と、操作対象の自然由来柄の特徴量を試料と同様に抽出し、同時に位相情報を保持する特徴量抽出部と、入力された操作項目・操作量と、関連保持部が保持しりデータから特徴量パラメータ変更値を導出する変更値導出部と、この変更値について操作対象の特徴量を変更する特徴量変更部と、変更後の特徴量と、特徴量抽出部が保持する位相情報とを用いた逆フーリエ変換により、操作対象を任意の評価項目について変化させた自然由来柄を創成する自然由来柄創成部とを具える自然由来柄の創成システム。
(もっと読む)
画像識別方法および撮像装置

【課題】撮像装置で撮影された画像のブロック画像の特徴量を用いて対象を識別する際に、CPUの処理コストを抑えて、高精度に対象を識別すること。
【解決手段】画像データを複数のブロックに分割してブロック画像を生成し、ブロック画像の色空間情報および周波数成分によって夫々のブロック画像の特徴量を演算する。また、予め教師データとして、カテゴリごとの画像特徴量を演算して、この特徴量を用いてカテゴリを識別する境界となる分離超平面を計算しておき、新たに取得した画像についても同様にブロック画像の画像特徴量を計算し、各カテゴリの分離超平面からの距離によって、当該ブロック画像の属するカテゴリを判定する。
(もっと読む)
画像アップサンプリング方法およびシステム
【課題】低演算量で実行できる低解像度画像から高解像度画像への画像アップサンプリング方法およびシステムを実現する。
【解決手段】画像アップサンプリング用法および画像アップサンプリングシステムは、高解像度画像のサンプル位置に対応する低解像度画像の位置の位相に基づいて選択されたフィルタ係数を用いたダイレクト補間処理を用い、H.264/MPEG-4 AVCスケーラブル映像符号化(SVC)拡張方式に適応される。
(もっと読む)
商品関心度計測装置
【課題】一つの画像内の複数の商品についての関心度を計測することができ、また、来客個々について高精度の情報を収集できるようにして、複数の商品について来客個々の挙動データを同時並行して能率的効率的に収集し、その集計結果に対する信頼性を高くするとともに、個々の商品に対するそれぞれの全来客の関心度合いを定量的に把握できるようにする。
【解決手段】商品関心度計測装置は、画像処理装置を備える。画像処理装置は、撮像画像において人物画像の概略的な輪郭を法線ベクトルで認識し当該法線ベクトルを基にその人物画像を上記仮想重心点として捉えるとともに当該仮想重心点を経時的に追跡する人認識手段と、複数の関心計測領域内での仮想重心点の瞬間移動速度をそれぞれ計測する移動速度計測手段と、関心計測領域内での関心移動速度以下の仮想重心点の移動時間を計測しこれを滞在時間として人別に記憶装置に登録する滞在時間計測手段とを備える。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】複雑領域を素早く表示することが可能な画像処理装置を提供すること。
【解決手段】エンコード前の画像が表示される表示画面と、エンコード前の画像から複雑な画素領域を検出する複雑領域検出部と、複雑領域検出部により検出された複雑な画素領域を表示画面に表示する複雑領域表示部と、画像内の任意領域をユーザが指定領域として指定するための操作入力部と、操作入力部を介して指定された指定領域に所定の画像処理を施す画像処理部とを備える、画像処理装置が提供される。
(もっと読む)
画像評価方法および画像評価装置
【課題】画像形成装置により形成された画像の周波数特性に基づき的確に画像評価を実現する技術を提供する。
【解決手段】単一の濃淡画素値を有するテストパターンデータを画像記録媒体にテストパターン画像として形成し、前記テストパターン画像を被評価画像データとして取得する。前記被評価画像データを2次元周波数解析し周波数強度を算出し、前記周波数強度のうち特定の角度方向の周波数強度に基づく評価データを表示する。
(もっと読む)
学習モデル生成装置及びプログラム並びに対象物検出装置及びプログラム
【課題】画像内の対象物の大きさにかかわらず、対象物を高精度に検出する。
【解決手段】学習モデル生成装置は、対象物を含む複数の学習用画像に対して、当該学習用画像内の対象物の大きさに応じて輪郭部分の階調差が異なるような前処理を行う学習用前処理部11と、前処理された各学習用画像に基づいて、前記対象物の特徴を示す学習モデルを生成する学習部12と、を備えている。
(もっと読む)
画像抽出方法及び装置
【課題】 所望の対象物を精度良く自動抽出する。
【解決手段】
特徴量抽出装置20は入力画像の特徴量分布を求め2値化する。テンプレートデータ生成装置22は、選択されたテンプレートデータから互いに大きさが異なる複数のテンプレートセットを自動生成する。テンプレート走査装置26は、各テンプレートをそれぞれ画像上でその大きさに応じたサンプリングピッチでラスタースキャンし、各場所で第1の形状適合度を求める。テンプレート図形要素変形装置30が、テンプレート図形を構成するある図形要素の代表点を移動範囲内で移動し、移動後の代表点間を結ぶ新たな曲線セグメントを生成する。形状適合度評価装置32が各部分で第2の形状適合度を評価することにより、第2の形状適合度が所定の基準値以上又は最大となるように代表点が移動する。境界線生成装置34が、代表点間を結ぶ線を生成する。
(もっと読む)
瞬目種別識別装置、瞬目種別識別方法、及び瞬目種別識別プログラム
【課題】瞬目波形特性が標準的なドライバとは異なるドライバに対しても瞬目種別識別性能を向上させ、不特定ドライバの瞬目種別識別を可能にする瞬目種別識別装置、瞬目種別識別方法、及び瞬目種別識別プログラムを提供する。
【解決手段】瞬目種別識別装置10は、瞬目波形入力部101でドライバが高覚醒状態である時の瞬目波形データを入力し、標準瞬目波形特徴量算出部103で当該ドライバの標準の瞬目波形特著量を算出する。瞬目波形入力部101で当該ドライバの瞬目種別の識別対象となる瞬目波形データを入力し、当該識別対象となる瞬目波形データに基づいて、識別対象となる瞬目波形特徴量を識別対象瞬目波形特徴量算出部104で算出する。瞬目識別特徴量算出部105は、標準の瞬目波形特徴量を用いて識別対象となる瞬目波形特徴量を補正することにより、瞬目波形種別を識別するHMMに入力するための瞬目識別特徴量を算出する。
(もっと読む)
サブピクセル推定装置およびサブピクセル推定方法
【課題】得られた相関値に対して最適なサブピクセル推定モデルを選択して使用することで、精度の高いサブピクセル推定を行うことができるサブピクセル推定装置およびサブピクセル推定方法を提供する。
【解決手段】サブピクセル推定装置1は、2以上の画像を取得し、保持する画像取得部2と、画像のうち互いに対応する画像間の相関値を算出する相関値算出部3と、相関値算出部3により算出された相関値がピークとなるピーク位置を特定し、ピーク位置およびピーク位置の周辺における相関値を特定するピーク位置特定部4と、ピーク位置およびピーク位置の周辺における相関値とサブピクセル推定モデルとの合致度を評価する合致度評価部6と、合致度に基づいてサブピクセル推定モデルを選択するサブピクセル推定モデル選択部7とを備えている。
(もっと読む)
画像認識装置
【課題】画素ブロック程度の大きさで検出される動く物体を高い精度で認識する画像認識装置を提供する。
【解決手段】画像認識処理部16では、評価値算出部21,動き領域抽出部23が、画像データをMPEG方式の符号化データに符号化する際、又はMEPEG方式で符号化された符号化データを画像データに復号する際に生成される動きベクトル、2次元DCT係数、符号化情報(ピクチャタイプ,ブロックタイプ)を使用して、画像の特徴を表す複数種類の評価値を作成し、更新処理部24が、その評価値と各種オブジェクトとの関係を規定した判定ルールに従い、マクロブロックを最小単位として画像認識を行う。従って、オブジェクトがマクロブロック程度の大きさであり、動きベクトルが発生し難い状況であっても、2次元DCT係数に基づいて生成された評価値から、オブジェクトの動きを検出できる。
(もっと読む)
対象物分類方法および装置
対象物を分類する、具体的には車両の少なくとも一部の画像に対応している画像データセットと各々が車両の参照画像に対応する複数の参照データセットの各々との間の相関度を評価することによって車両を分類する方法は、車両の局面を確立するステップ(302)と、車両の局面に基づいてそのようなデータセットのより大きい群から複数の参照データセットを選択するステップ(304)とを含む。より大きい群から車両の局面に対応するこれらの参照データセットのみを選択することによって、与えられたレベルの処理資源で、より高速な分類が実現される。あるいは、与えられた処理または分類速度において、従来技術と比較して処理資源のレベルが下げられ得る。 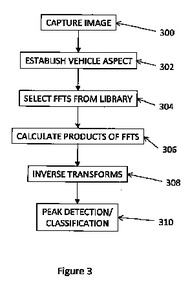 (もっと読む)
(もっと読む)
画像判別装置、画像検索装置、画像検索プログラムおよび記録媒体
【課題】 判別処理に要する演算量を削減するとともに判別精度を向上させることが可能な画像判別装置を提供し、検索処理に要する時間を短縮するとともに検索精度を向上させることが可能な画像検索装置、画像検索プログラムおよび記録媒体を提供する。
【解決手段】 前処理部120は、入力された画像データを2値化し、全体黒画素割合を算出する。特徴抽出部121では、2値画像データ中に含まれる、結合要素を検出し、この結合要素に外接する外接矩形を検出する。検出された外接矩形の大きさと、含まれる黒画素数とに基づいて、所定の結合要素を除去する。判別部122は、残余の結合要素を用いて、エッジマップを生成し、2次元高速フーリエ変換を行ってスペクトルデータを生成する。テンプレート画像に対しても2次元高速フーリエ変換を行ってスペクトルデータを生成し、これらに基づいて入力画像データに円形状が含まれているかどうかを判別する。
(もっと読む)
画像検索装置
【課題】
従来の画像検索装置ではキーワードから検索した画像の画質については画素数とファイル容量でしか判断できなかった。同じような画像があった場合にユーザが画像を1つ1つ拡大表示したりして比較して必要な画像の識別を行なっていた。
【解決手段】
画像の周波数成分を比較することで人間では判断しづらい画質を自動的に判断して高精細さの良い画像を容易に抽出できるようになった。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】本発明は、画像品質判定における誤判定を抑制することが可能な技術を提供する。
【解決手段】プリンタ10は、画像においてエッジ量が基準値よりも多いエッジ領域を特定するエッジ領域特定部315と、エッジ領域を周波数領域で表したパワースペクトルを生成する周波数変換部320と、パワースペクトルにおける振幅値の手ブレ方向を特定する手ブレ方向推定部330と、手ブレ方向の振幅値を一次元化した一次元振幅データを生成する一次元化部340と、一次元振幅データを周波数に応じて重み付けする重み付け部350と、一次元振幅データにおいて振幅値が谷状に変化する領域の周波数に基づいて手ブレ画像であるか否かを判定する判定部360とを備える。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】本発明は、手ブレ判定における誤判定を抑制することが可能な技術を提供する。
【解決手段】プリンタ10は、画像を周波数領域で表したパワースペクトルを生成する周波数変換部320と、パワースペクトルにおける振幅値の手ブレ方向を特定する手ブレ方向推定部330と、手ブレ方向の振幅値を一次元化した一次元振幅データを生成する一次元化部340と、一次元振幅データを周波数に応じて重み付けする重み付け部350と、一次元振幅データにおいて振幅値が谷状に変化する領域の周波数に基づいて手ブレ画像であるか否かを判定する判定部360とを備える。
(もっと読む)
車両走行支援装置、車両、車両走行支援プログラム
【課題】車両が走行中の道路において複数の並列する人工溝の有無を高精度で認識する。
【解決手段】車両走行支援装置によれば、カメラを通じて得られた画像において、実空間における車両の第1予測走行領域を表わす指定画像領域QAの横方向の濃淡変化態様が高速フーリエ変換処理の実行により生成された周波数スペクトルとして認識される。車両が走行している道路に複数の並列する人工溝Gが設けられている場合、指定画像領域QAにはその横方向に特徴的な濃淡変化態様(スペクトルにおけるピーク)が現われる。したがって、この濃淡変化態様に基づき、第1予測走行領域における複数の並列する人工溝Gの有無が高精度で認識されうる。さらに、道路に複数の並列する人工溝Gが存在しないと認識されたことを要件としてエッジ抽出処理およびハフ変換処理の実行結果に基づいて車両の第2予測走行領域における積雪の有無等、道路の状態が認識される。
(もっと読む)
画素間の類似尺度をリアルタイムで計算するための装置及びプログラム
【課題】画素間の類似尺度を高い信頼性で計算する。
【解決手段】類似尺度計算装置は、第1の画素250と第2の画素270との間の類似尺度を計算する。この装置は、それぞれ第1及び第2の画素を中心とする第1及び第2の円形ウィンドウ252及び272の各々の半径の各々上の画素の画素値を平均化する平均化計算部と、平均化された画素値の第1及び第2の列のフーリエ係数の第1及び第2のシーケンスを出力するFFT変換部と、第1及び第2のシーケンスの各々を正規化するための正規化ブロックと、FFT係数の第1及び第2の正規化されたシーケンス間の距離を計算する距離計算部と、を含む。
(もっと読む)
情報処理装置
【課題】高次元空間におけるデータを高精度に分類するための情報処理装置を提供することを課題とする。
【解決手段】任意の次元の空間におけるデータを処理する情報処理装置1であって、主成分空間の次元毎に、各ラベルが対応付けられたデータ群を主成分分析し、主成分空間を導出する主成分分析手段と、主成分空間の次元毎に、主成分分析手段で導出された各ラベルでの主成分空間に対する直交補空間をそれぞれ導出し、各ラベルでの直交補空間の共通空間を導出する共通空間導出手段と、共通空間導出手段で導出された主成分空間の次元毎の共通空間の中から、任意の次元の空間におけるデータをラベル毎に最も分離可能な共通空間を選択する選択手段とを備えることを特徴とする。
(もっと読む)
解析装置
【課題】処理コストを増大させることなく、3次元動きベクトルと物体の形状計測とを精度良く行う。
【解決手段】3D動きベクトル算出部26は、変化量算出部25により算出された3次元位置の変化量と、傾斜情報算出部22により算出された傾斜情報と、2D動きベクトル算出部24により算出された2次元動きベクトルとに基づいて、各計測点を基準としたときの各計測点に対応する移動点の3次元位置の変化量を推定し、推定した変化量を各計測点の3次元動きベクトルとして算出する。
(もっと読む)
81 - 100 / 273
[ Back to top ]