
Fターム[5L096FA32]の内容
Fターム[5L096FA32]に分類される特許
81 - 100 / 785
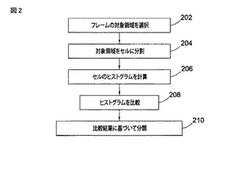
映像解析方法およびシステム
【課題】歩行者を時系列的に撮像することにより、該歩行者を的確に分類する。
【解決手段】映像シーケンスの特徴を分類する方法は、前記映像シーケンスのフレームの、前記特徴を含んでいる対象領域を選択すること、前記対象領域を複数のセルに分割すること、前記セルによりオプティックフローのヒストグラムを計算すること、セル対についての前記オプティックフローのヒストグラムを比較すること、前記比較の結果の少なくとも一部に基づいて前記特徴をクラスに割り当てること、を含む。
(もっと読む)
文字存在判断方法、文字存在判断装置及び文字存在判断プログラム

【課題】窓領域画像と基準画像との間に位置ズレがある場合等であっても、所定の領域に文字が存在するか否かを判断することを可能とする文字存在判断方法を提供する。
【解決手段】基準画像から窓領域画像を差し引いて差分画像を算出し、差分画像の第1辺エリアの平均値と差分画像の第1辺エリアと対向する第2辺エリアの平均値との差分絶対値が第1閾値を超え第2閾値未満であるかを判断する第1判断ステップと、差分画像の真中横エリアの平均値が第3閾値を超え且つ差分画像の真中横エリアの標準偏差が第4閾値を超え又は差分画像の真中縦エリアの平均値が第5閾値を超え且つ差分画像の真中縦エリアの標準偏差が第6閾値を超えるかを判断する第2判断ステップと、第1判断ステップの判断結果が否定的で且つ第2判断ステップの判断結果が否定的であれば、窓領域画像に文字が存在していないと判断する。
(もっと読む)
計算機システム、及び画像/図表を位置合わせする方法
【課題】異なる属性を持つ画像及び図表を位置合わせするための特徴量を自動的に求める。
【解決手段】画像と図表との位置合わせをする計算機システムであって、演算部と、記憶部と、入力部と、データ記録部と、を備え、前記受け付けた画像及び図表を前記記憶部から読み出し、前記読み出された画像及び図表の各々をサンプル点を中心とした複数の領域に分割し、前記分割された領域の特性を判定して前記画像及び図表の特徴パターンのセットを生成する特徴パターン生成部と、前記生成された特徴パターンを比較することによって、前記位置合わせをする画像及び図表の対応関係を計算する関係計算部と、前記計算された対応関係に基づいて、前記位置合わせをする画像及び図表の少なくとも一つの座標系を変換する変換部と、前記座標系が変換された画像及び図表を結合する結合部と、を含む。
(もっと読む)
画像認識方法及び装置並びにプログラム
【課題】画像認識方法及び装置並びにプログラムにおいて、比較的少ない計算量で効率良く認識対象を認識することを目的とする。
【解決手段】入力画像を複数の領域に分割し、各領域について輝度勾配ベクトルの方向を複数の区間に分割して各方向の区間について、予め複数のサンプル画像から取得済みの輝度勾配ベクトルの大きさの出現頻度に関する特徴量に基づいて、各領域の輝度勾配ベクトルの方向毎に輝度勾配ベクトルの大きさの出現頻度から得られるエントロピーを累積したヒストグラムを計算し、前記ヒストグラムを認識対象と非認識対象を識別する識別器により評価して、入力画像が認識対象であるか非認識対象であるかを識別するように構成する。
(もっと読む)
画像ボケ量計算装置およびそのプログラム
【課題】本発明は、処理時間が短く、計算コストが低い画像ボケ量計算装置を提供する。
【解決手段】画像ボケ量計算装置1は、微分画像を生成するソーベルフィルタ10と、微分画像に含まれるエッジを検出するエッジ検出手段20と、エッジの開始点および終了点を検出する開始点・終了点検出手段30と、開始点・終了点検出手段30が検出した開始点と終了点との輝度値の差と、開始点と前記終了点との輝度勾配の平均値とを算出すると共に、輝度値の差を輝度勾配の平均値で除算した値に基づいて画像ボケ量を計算する画像ボケ量計算手段40と、画像ボケ量計算手段40が計算した水平方向および垂直方向の画像ボケ量を平均する画像ボケ量平均手段50とを備える。
(もっと読む)
地図生成装置、地図生成方法、移動体の移動方法、及びロボット装置
【課題】たくさんの人が存在する混雑な環境下で地図構築を行う。
【解決手段】ロボットが移動する間に連続して撮影した連続画像を取得する連続画像取得部11と、連続画像から各特徴点における局所特徴量を抽出する局所特徴量抽出部12と、局所特徴量抽出部12により抽出した局所特徴量について、連続する入力画像間でマッチングをとる特徴量マッチング13と、特徴量マッチング部13により所定数連続する画像間でマッチングが取れた局所特徴量の平均を不変特徴量として求める不変特徴量算出部14と、連続画像を取得した各時刻におけるロボットの位置に基づき各不変特徴量に対応する距離情報を算出する距離情報取得部15と、当該不変特徴量及び距離情報を有するハイブリッド地図として、局所メトリカル地図を生成する地図生成部16とを有する。
(もっと読む)
画像処理装置、画像処理方法、画像処理システム、及び画像処理プログラム
【課題】入力画像の特徴を基に抽出した注目領域候補の形状に応じて、初期輪郭の制御点を適切に設定できるようにする。
【解決手段】入力画像は、前処理部22にて必要に応じて解像度変換、色空間変換を受け、ROI候補領域抽出部23で注目候補領域が抽出される。抽出された注目候補領域に対して、制御点生成部24で輪郭の抽出、及びサンプリングを行う。輪郭の複雑な形状部には多くの制御点を、簡単な形状の部分には少数の制御点を割り振ることで、初期輪郭として利用するのに好適な制御点を構成することができる。
(もっと読む)
流水監視システムおよび流水監視プログラム
【課題】監視対象にある水路の流水異常を経済的に有利な構成で効率よく検知し報知することができる流水量監視システムを提供する。
【解決手段】流水(Wb)部分を含む水路1の画像を撮影する単眼カメラ(一つのカメラ)11と、このカメラ11で撮影した水路1の画像をキャプチャするキャプチャ部12と、このキャプチャ部12でキャプチャした時系列の複数の画像から背景画像を作成し、背景画像の時系列に従う領域変化から水路1の流水量を判定する画像処理部13と、画像処理部13の判定結果の情報を出力する出力手段(表示部)19とを備える流水監視システム。
(もっと読む)
画像処理装置、及びコンピュータプログラム
【課題】本発明は、設計データと輪郭線、或いは輪郭線間のマッチングを行うに当たり、両者の対応点を正確に特定する画像処理装置、及びコンピュータプログラムの提供を目的とする。
【解決手段】上記目的を達成するための一態様として、第1の線分によって形成される第1のパターンと、第2の線分によって形成される第2のパターン間の位置合わせを行うときに、第1の線分と第2の線分上にそれぞれ第1の対応点と、第2の対応点を設定し、第1の対応点と第2の対応点間の距離に基づいて、第1のパターンと第2のパターンの位置合わせを行うためのアライメント量を算出すると共に、第1の線分と第2の線分の形状差に応じて、第1の対応点、及び/又は第2の対応点の位置を変化させる。
(もっと読む)
特徴量取得装置、特徴量取得方法、類似画像検索方法およびプログラム。
【課題】画像データの特徴量を取得する特徴量取得方法において、比較的小さい次元数の特徴量で、画像毎の特徴の違いを適切に反映する特徴量を求められるようにする。
【解決手段】特徴量取得装置1が、前記画像データの画素値の平均および分散を算出し、算出した平均および分散に基づく特徴量を求める特徴量算出部314を具備する。データの特性を端的に示す指標である平均および分散に基づいて特徴量を算出することにより、画像毎の特性の違いを適切に反映し、比較的次元数の少ない特徴量を得ることができる。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】 特徴量空間の無数の基底関数の選択肢の中からパターン認識に有効な基底関数を優先的に選び、アンサンブル学習を行うこと。
【解決手段】対象物の姿勢を判別する情報処理装置は、入力部を介して入力された対象物の姿勢を示す複数のパターン間における特徴量の差異の分布を算出する算出部と、算出部により算出された差異の分布を正規化して求められた確率分布を用いて、対象物の姿勢を判別するために参照するべきパターンにおける画素を決定する決定部と、決定部により決定された画素の特徴量と、予め設定された閾値と、の比較により対象物の姿勢を求めるための判別を行う判別部と、を備える。
(もっと読む)
動きオブジェクト検出装置、動きオブジェクト検出方法、及びプログラム
【課題】実時間処理に適している、動きオブジェクト検出装置、動きオブジェクト検出方法、及びプログラムを提供する
【解決手段】可変ブロックサイズ動き補償予測のブロックサイズを検出する検出部11と、検出部11が第1所定サイズのブロックを検出した場合に、当該ブロックを含む第1マクロブロックについて、第1動きベクトルを算出する算出部12と、第1動きベクトルに基づいて動きオブジェクト領域を設定し、動きオブジェクト領域に隣接する第2所定サイズのブロックを含む第2マクロブロックも動きオブジェクト領域に加える生成部13と、を備える。算出部12は、動きオブジェクト領域に隣接する、第1及び第2所定サイズのブロックを含まない第3マクロブロックについて、第2動きベクトルを算出する。生成部13は、第2動きベクトルに基づいて、第3マクロブロックを動きオブジェクト領域に加える、ことを特徴とする。
(もっと読む)
流水監視システムおよび流水監視プログラム
【課題】監視対象にある水路の流水異常を経済的に有利な構成で効率よく検知し報知することができる流水監視システムを提供する。
【解決手段】画像処理部13は、カメラ11で撮影した流水(Wb)部分の映像から水の揺らぎを捉え量子化して水路1における流水(Wb)の流水量を示す流水量データを生成する流水画像処理部15と、流水画像処理部15で得た流水量データを判定対象データとして設定パラメータをもとに上記水路1の流水量が設定範囲内の正常状態にあるか否かを判定する判定処理部16とを具備する。
(もっと読む)
形状認識装置
【課題】2次元構造の断面データが表す形状曲線を近似するための処理を簡単に行うことが可能な形状認識装置を提供する。
【解決手段】形状認識装置Cは、3次元データが表わす外面形状の曲率が第1所定値を超える領域を抽出する曲率除外領域抽出手段14と、曲率の変化量が第2所定値を超える領域を抽出する変化量除外領域抽出手段15と、曲率除外領域抽出手段14により抽出された領域と変化量除外領域抽出手段15により抽出された領域とを除外領域として設定する除外領域設定手段16と、3次元データにおける設定領域の形状を詳細に反映した詳細形状データと粗く反映したベース形状データとを取得すると共に、夫々の形状データから除外領域に含まれるデータを除外して夫々の修正形状データを生成し、夫々の修正形状データの曲率に基づいて外面形状の歪値を抽出する形状評価手段20と、を備える。
(もっと読む)
ビデオ監視時に移動物体を分類するシステムおよび方法
【課題】ビデオ監視時にあらゆる移動物体を既定のクラスに分類できるシステムおよび方法を提供する。
【解決手段】ビデオによる監視時に移動物体を分類するシステムは、移動物体のシルエット画像を撮影するステップと、撮影された画像の大きさを変更するステップと、大きさが変更された画像の中の移動物体の幅に対する高さの平均比と重心を計算するステップと、大きさが変更された画像を分割するステップと、物体の平均高さと平均幅とを比較するステップと、さらに、重心の分散と所定の閾値とを比較して、撮影されたシルエット内の物体を既定のクラスに分類するステップとを含む。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】文字領域を含む画像に対して当該文字の再利用性の向上を考慮した補正処理を行う。
【解決手段】入力画像から文字領域を抽出し、歪みを補正する。複数の歪み補正後の文字領域に関する情報を用いて歪み補正後の文字領域に対する補正量を決定し、補正を行う。
(もっと読む)
監視システムおよび監視方法
【課題】監視カメラで撮影した群集の映像から、汎用的に、定常/非定常を含む様々な状態を検出することができる監視システムを提供する。
【解決手段】監視システムMSは、群集の映像を撮影し入力する映像入力手段1と、入力した映像から、オプティカルフローを算出するオプティカルフロー算出手段2と、映像上の領域を、非定常判定する単位のブロックに区切っておく判定ブロック設定手段3と、各判定ブロック内で発生するオプティカルフローの属性を集計するオプティカルフロー属性集計手段4と、集計したオプティカルフローの属性から、当該判定ブロックの定常度を評価する評価指標を算出する定常度評価指標算出手段5と、評価指標の値から当該判定ブロックの非定常状態を判定する非定常状態判定手段6と、判定した定常もしくは非定常状態を、映像上に描画しモニタもしくは記録手段に出力する出力手段7とを備えている。
(もっと読む)
テンプレート画像生成装置およびテンプレート画像生成プログラム
【課題】複数の番組映像における典型的な演出シーンから固定部分と可変部分とを考慮したテンプレート画像を自動的に生成することができるテンプレート画像生成装置およびテンプレート画像生成プログラムを提供する。
【解決手段】テンプレート画像生成装置1は、複数の番組映像をショットごとに分割し、当該ショットから代表静止画像を抽出してブロック分割し、ブロックごとの画像特徴量を抽出する画像特徴量抽出手段10と、画像特徴量の類似度に従って代表静止画像を階層クラスタリングし、その結果を示す樹形図を所定の階層で切断した場合における切断線との各交点から、1つ1つ下の階層を辿り、所定距離以上離れて分岐を持つクラスタを抽出するテンプレート候補クラスタ抽出手段20と、テンプレート候補クラスタからマスク情報とテンプレート画像とを生成するテンプレート画像生成手段30と、を備える。
(もっと読む)
検出器構成装置、方法、及びプログラム
【課題】解像度が異なる複数の段階で検出を行う検出器において、各段階において検出すべき状態や属性といった検出対象のモダリティ種別を客観的に決定する。
【解決手段】検出器構成装置10は、複数のモダリティ種別のそれぞれに対して、入力データに含まれるオブジェクトの属性が複数の属性値の何れであるかを、解像度が相互に異なる複数段階の検出処理で検出する検出器を構成する。教師データ入力部11は、検出器の学習に用いられる、各モダリティ種別に対応した複数の教師データを入力する。変動量算出部13は、入力された教師データに基づいて、モダリティ種別ごとに複数の教師データ間の変動の代表値を求める。検出段決定部14は、教師データ間の変動の代表値に基づいて、複数段階の検出処理のうち、各モダリティ種別をどの段階の検出処理で検出するかを決定する。
(もっと読む)
動線処理装置、方法及びプログラム
【課題】動線データの揺動を抑制し、高精度の動線長が得られるようにする。
【解決手段】動線処理装置は、監視領域内を移動する移動体の監視領域内における位置データを時系列に記述してなる動線データを取得し、この動線データに対して空間的フィルタリングを行う。そして、空間的フィルタリングが行われた動線データを出力する。
(もっと読む)
81 - 100 / 785
[ Back to top ]