
Fターム[5L096FA32]の内容
Fターム[5L096FA32]に分類される特許
61 - 80 / 785
姿勢検出装置
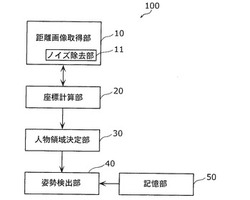
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
画像識別子抽出装置

【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】この画像識別子抽出装置は、画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量を当該次元毎に算出する算出手段を備える。また、2つの部分領域は画像の中心に近づくにつれてより多く配置され、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと相違する。
(もっと読む)
エッジ方向検出装置またはその方法
【課題】 信頼度の高いエッジ検出をする。
【解決手段】
差分総計値演算手段5は、指定された矩形領域について、前記組み合わせ画素記憶手段における組み合わせ画素の差分の絶対値を、各エッジ方向について総計した差分総計値をエッジ方向毎に演算する。中央近傍画素差分値演算手段11は、前記各エッジ方向について、中央近傍画素値と前記代表画素値との差分を、中央近傍画素差分値として演算する。エッジ検出信頼度演算手段13は、前記各エッジ方向について、前記中央近傍画素差分値および前記差分総計値に基づいて、エッジ検出信頼度を演算する。決定手段15は前記エッジ検出信頼度が高いエッジ方向が前記矩形領域におけるエッジ方向であると決定する。
(もっと読む)
相互計算を実行するための方法及び装置
【課題】第1の信号と第2の信号との間の相互計算を実行する信号処理方法を提供する
【解決手段】第1の信号を長さMのより短いセグメントに分割するステップと、第1の信号のセグメントと第2の信号との複数の部分相互相関関数を得るステップと、部分相互相関関数を合成して合成相互相関関数を得るステップと、異常値検出又は異常値除去手法を適用し、乱れているか若しくは破損したセグメントを特定又は除去するステップとを含み、異常値検出手法は、部分相互相関が上記合成相互相関関数とコンセンサスしているか否かをチェックするために、個々の部分相互相関関数を合成部分相互相関関数と比較して、コンセンサスチェックを実行し、コンセンサスチェックに基づいて乱れているか若しくは破損したと特定されたものを用いることなく、部分相互相関関数を再合成し、乱れの少ない又は破損の少ない最終的な相互相関関数を得る方法。
(もっと読む)
混雑度推定装置
【課題】現在と過去における列車の運行状況および人の動きの変化パターンを考慮して、混雑が正常か異常かといった混雑度を推定する混雑度推定装置を提供する。
【解決手段】混雑度推定装置は、移動体の到着する地点付近の映像データを取得する撮像部101と、移動体の到着を検知する移動体検知部103と、映像データを処理して人物の流れを計測する人流計測部105と、人流計測部105の計測結果から典型的な時系列の変化を表したパターンデータを抽出してパターンデータベース111に保存する解析部107と、移動体の運行予定情報と人流計測部105の処理結果およびパターンデータを参照して混雑度を判定し、移動体または移動体到着地付近の混雑度が正常かあるいは異常かを表示する。
(もっと読む)
輝度勾配方向検出器及び輝度勾配方向検出方法
【課題】計算量が多い三角関数を用いることなく、高速に輝度勾配方向を検出する輝度勾配方向検出器及び輝度勾配方向検出方法を提供する。
【解決手段】注目画素を囲む8つの画素に時計回りに順に番号を割り振り(B1)、当該8つの画素の輝度値から注目画素を中心とする8つの点対称方向の輝度差分値を求め(B2)、8つの輝度差分値から最大となる最大輝度差分値を求め(B3)、最大輝度差分値を有する方向の画素が中央の番号となるように、8つの画素に時計回りに順に仮番号を割り振り(B4)、中央の番号とその両隣の画素の仮番号について、最大輝度差分値と両隣の画素の輝度差分値を重みとして、仮番号の重み付き平均値を求め(B5)、仮番号の重み付き平均値から中央の番号を引くと共に、最大輝度差分値を有する方向の画素の番号を加えることにより、注目画素における輝度勾配方向を検出する(B6)。
(もっと読む)
画像切出装置及びプログラム
【課題】ユーザが自らの検索意図を反映した質問画像を容易に作成できるように、代表ブロック領域画像を抽出する際に用いる適切なブロック領域画像を切り出す。
【解決手段】ブロック領域画像切出部2−1は色分布判定手段3を備えている。色分布判定手段3は、検索対象画像を複数のブロック領域画像に分割し、ブロック領域画像を上下左右の領域に分割し、さらに、1ピクセル毎にシフトさせた後のブロック領域画像を上下左右の領域に分割し、これらの分割領域間の類似度を求め、類似度が閾値以上のブロック領域画像を、色分布が一様なブロック領域画像Aとして切り出す。これにより、画像内部に輪郭、地平線等を含むブロック領域画像が不適な画像として除外され、不適な画像を含まないブロック領域画像Aが切り出される。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム
【課題】精度のより高いブロックマッチングを実現可能な画像処理技術を提供する。
【解決手段】画像処理装置は、第1画像に含まれる第1ブロックに含まれる画素間で画素値の変化が大きいほど高いアクティビティの度合いを示すアクティビティ値を算出し、第1ブロックにおける画素値と、第2画像に含まれる第2ブロックにおける画素値との差が小さいほど高い評価を示す第1評価値を算出し、第1ブロックにおける画素値の空間的な相対関係と、第2ブロックにおける画素値の空間的な相対関係との相関が高いほど高い評価を示す第2評価値を算出し、アクティビティ値が高いほど第1評価値の割合を大きくし、アクティビティ値が低いほど第1評価値の割合を小さくして、前記第1評価値及び前記第2評価値から、前記第1ブロックに対応する前記第2ブロックを探索するための第3評価値を算出する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラムを記録した記録媒体
【課題】撮影された時系列画像から、人物らしい領域に対して個人が特定できないように画像変換を行う。
【解決手段】複数フレームの画像を元に、各画素の平均値を算出するステップと、平均値から大きく外れている画素値を取り除くステップと、該当画素から分散値を算出するステップと、分散値に対して、膨張処理、収縮処理を行い、分散値画像を生成し、多次元の変換式により変換を行うステップと、背景画像を更新するステップと、取得した画像から低周波数成分画像を生成するステップと、取得した画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と取得した画像との差異から人物らしさを算出するステップと、高周波数成分画像の各画素の値を人物らしさの各画素の値を用いて抑制した抑制後の高周波数成分画像を生成するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成して結果画像を生成するステップを有する。
(もっと読む)
背景差分処理装置、背景差分処理方法及びコンピュータプログラム
【課題】背景の移動に伴う前景抽出の精度低下を抑止可能とすること。
【解決手段】背景差分処理装置であって、複数の入力画像を蓄積する入力画像記憶部と、入力される入力画像を前記入力画像記憶部に書き込む画像入力部と、前記入力画像記憶部に蓄積されている前記複数の入力画像に基づいて、新たに入力された入力画像に対し背景差分処理を行い、前記入力画像から前景画像を抽出する背景差分処理部と、新たに入力された入力画像と過去に入力された入力画像との背景部分が移動状態であるか停止状態であるか判定する背景変化判定部と、前記背景変化判定部によって、移動状態と判定された後にその後の入力画像に基づいて停止状態と判定された場合に、前記入力画像記憶部に蓄積されている前記複数の入力画像を初期化する入力画像初期化部と、を備える。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】この画像識別子抽出装置は、画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量を当該次元毎に算出する算出手段を備える。また、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと、画像の左右または上下に対して対称性を有する。さらに、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと相違する。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】この画像識別子抽出装置は、画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量を当該次元毎に算出する算出手段を備える。また、2つの部分領域は、各々の大きさ、および、相対的な位置関係が一様分布に従うように構成され、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと相違する。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から当該次元毎に領域特徴量を算出し、各次元が複数のタイプに類型化され、当該タイプ毎に閾値を決定し、閾値を使用して、差分値を、画像識別子の各次元の値として量子化する。ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域とは、形状の組み合わせが異なり、また、ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域とで形状の組み合わせが同一である場合に、上記ある次元に関連付けられた2つの部分領域と上記他の次元に関連付けられる2つの部分領域との距離が所定値以上である。
(もっと読む)
位置計測装置、位置計測方法及びマーカー
【課題】撮像画像における画素より小さな単位により画像中におけるマーカー位置を高精度に特定することを可能とする。
【解決手段】位置計測装置1では、マーカー画像が画像取得部10により取得され、二値化画像生成部11によりマーカー画像に基づき複数の異なる閾値ごとに二値化マーカー画像が生成され、マーカー重心座標算出部12により二値化マーカー画像におけるマーカーが捉えられた画素に基づきマーカー重心座標が算出されるので、当該二値化マーカー画像におけるマーカーの位置が特定される。また、1つのマーカーが捉えられたマーカー画像に基づき、画素の階調値に関する閾値を変えて複数の異なる二値化マーカー画像が生成され、複数の二値化マーカー画像ごとにマーカー重心座標が算出され、マーカー座標算出部13により複数のマーカー重心座標の重心の座標がマーカー座標として算出・出力される。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】この画像識別子抽出装置は、画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量を当該次元毎に算出する算出手段を備える。また、次元毎に対応付けられている2つの部分領域を示す次元別抽出領域情報に基づいて、当該次元毎に当該2つの部分領域が特定され、次元別抽出領域情報は、次元毎に、画像があらかじめ決められた数に分割されたブロックの一または複数を部分領域として特定する情報である。また、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと相違する。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から当該次元毎に領域特徴量を算出し、各次元が複数のタイプに類型化され、当該タイプ毎に閾値を決定し、閾値を使用して、差分値を、画像識別子の各次元の値として量子化する。また、ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域とは、形状の組み合わせが異なる。さらに、ある次元が類型化されるタイプに対応する閾値と他の次元が類型化されるタイプに対応する閾値とが同一である場合に、ある次元に関連付けられた2つの部分領域と他の次元に関連付けられる2つの部分領域との距離が所定値以上である。
(もっと読む)
被写体検出方法および被写体検出装置
【課題】被写体の検出処理に要する時間を短縮しつつ、被写体の検出精度を高めること。
【解決手段】Sobel−Haar特徴量抽出部が、メモリに記憶された入力画像からSobel−Haar特徴量を取得し、LDAArray部が、Sobel−Haar特徴量に基づいて確率分布画像を生成し、候補エリア抽出部が、確率分布画像から候補エリアを抽出する。また、Gabor特徴量抽出部およびSobel特徴量抽出部が、メモリに記憶された入力画像からGabor特徴量およびSobel特徴量をそれぞれ取得し、LDAArray部が、Gabor特徴量およびSobel特徴量ごとに、候補エリア内における確率分布画像をそれぞれ生成し、最終判定部が、確率分布画像に基づいて候補エリア内に姿画像が存在するか否かを判定するように姿検出装置を構成する。
(もっと読む)
画像識別装置及びプログラム
【課題】PTP包装済みの錠剤の画像データに基づいて高い精度で錠剤の識別を行うことを可能とする画像識別装置を提供する。
【解決手段】共分散行列算出手段8は、物体像画像の各画素の色ベクトルpiの分散共分散行列Sを算出する。固有値・固有ベクトル演算手段9は、分散共分散行列Sの固有値λk及び固有ベクトルφkを算出する。CDD演算手段10は、各固有値λkから寄与率rk=λk/(λ1+…+λK)を算出し、色分散記述子D={r1φ1,…,rKφK}を算出する。CDD距離演算手段は、各テンプレート画像の色分散記述子Dαと色分散記述子Dとの距離SCV(D,Dα)を算出する。テンプレート選択手段12は、この距離SCV(D,Dα)が最小のテンプレート画像を選択し、その番号αを識別結果として出力する。
(もっと読む)
動作解析装置
【課題】ユーザにとって、簡易に使用可能な動作解析装置を提供することである。
【解決手段】動作解析装置は、動画の入力を受け付けると(S11)、静止画を操作部に表示する(S12)。動作解析装置は、ユーザから静止画像上の任意の箇所を指定される(S13)。そうすると、指定点を中心とした半径rの範囲内において、第一の特徴点の検索を行う(S14)。そして、第一の特徴点を検索した静止画より時間的に後に隣り合う静止画において、第一の特徴点に対応する第二の特徴点の検索を行う(S15)。そして、特徴点の差を算出し(S16)、算出した差の平均値を求める(S17)。そして、連続する複数の静止画の隣り合う静止画像間の全てにおいて、特徴点の差をそれぞれ算出し、算出した差の平均値を求めると(S18において、YES)、求めた平均値を順に接続する。このようにして軌跡を作成する(S19)。
(もっと読む)
侵入物体検出装置
【課題】監視領域内に存在する植栽の前を移動する侵入物体を検出するとともに、植栽の揺れによる誤検出を抑制できる侵入物体検出装置を提供する。
【解決手段】侵入物体検出装置100は、監視領域を撮影した監視画像を取得する撮像部10と、監視領域に侵入物体が存在しない状況において監視領域を撮影した画像である背景画像と、植栽が撮像されている画像上の領域を示す植栽領域を記憶する記憶部20と、監視画像と背景画像の差分によって、輝度値が変化した変化領域を抽出する変化領域抽出手段31と、変化領域について、変化領域が植栽領域と重なっている場合に重なっていない場合より侵入物体らしさが低くなる侵入物体らしさの度合いを表す侵入物体属性値を算出し、侵入物体属性値に基づいて変化領域が侵入物体によるものか否かを判定する判定手段36を有する。
(もっと読む)
61 - 80 / 785
[ Back to top ]