
Fターム[5L096FA59]の内容
Fターム[5L096FA59]に分類される特許
41 - 60 / 576
オブジェクト追跡方法及びオブジェクト追跡装置
【課題】オブジェクト追跡方法及び装置を提供する。
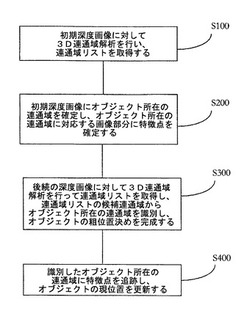
【解決手段】かかる方法は、入力された初期深度画像への3次元の連通域解析を行い、初期深度画像の連通域リストを取得する連通域取得ステップと、初期深度画像におけるオブジェクトの既知の現位置からオブジェクト所在の連通域を決定するとともに、該連通域に対応する画像部分におけるn個特徴点(nは自然数)を決定する初期オブジェクト決定ステップと、前記初期深度画像後に入力される後続の深度画像の3次元の連通域解析を行い、前記後続の深度画像の連通域リストの各候補連通域から、前記オブジェクト所在のオブジェクト連通域を識別する追跡ステップと、前記追跡ステップで識別されたオブジェクト連通域から、前記n個特徴点を追跡し、前記オブジェクトの現位置を更新するオブジェクト位置決めステップとを有する。
(もっと読む)
人体動作の認識の方法、装置、及びプログラム

【課題】
異なる動作や異なる個体に対応する人体動作周期及び人体動作を特定すること。
【解決手段】
本発明は人体動作周期を特定し、及び人体動作を認識する方法並びに装置を開示する。ビデオにおける人体動作周期を特定する方法は、所定の探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索し、探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索できた場合に、現在のフレームと前記人体姿勢が現在のフレームと類似するフレームとの間の時間長さをビデオにおける人体動作周期とすることを含む。異なる動作や異なる個体に対して、相応する人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出し、より正確な人体動作の認識を実現することができる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】検出対象の付近に発生する誤検出を低減して検出精度を高めることができるようにする。
【解決手段】入力画像に対して検出ウィンドウを走査し、前記検出ウィンドウ内の画像を評価して被写体か否かを判定し、被写体候補を出力する。そして、前記被写体候補のうち、互いに重複する被写体候補について位置関係を算出して、前記位置関係に基づいて被写体か否かを再判定する。このとき、検出ウィンドウを走査する際には、前記入力画像に対する前記検出ウィンドウを相対的に複数のサイズで走査し、位置関係を算出する際には、所定の位置の差と、サイズ比との関係にある被写体候補の組を選択する。そして、前記選択した被写体候補の各組について、それぞれの前記被写体候補間の位置関係に基づいて再判定する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】良好に異物影を検出できる画像処理装置および画像処理プログラムを提供する。
【解決手段】本発明の画像処理装置50は、2色以上のカラーフィルタ13aを通して撮像素子13により撮影された処理対象画像が入力される画像入力部52と、処理対象画像中に移り込んだ影部の大きさを判定し、一定の範囲内のものを第一次異物影候補として抽出する第一次判定を行う第一次異物影判定部61,62と、第一次異物影判定部において第一異物影候補であると判定された影部について、2色以上のカラーフィルタのうちの1色を通した光の第1色画像における、影部内の外に対する強度の第1落込割合と、他の1色を通した光の第2色画像における、影部内の外に対する強度の第2落込割合と検出し、第1落込割合と第2落込割合と差が閾値以下の影部を、第一異物影候補から更に絞り込んで第二次異物影候補と判定する第二次判定を行う第二次異物影判定部67と、を備える。
(もっと読む)
領域抽出装置、撮像装置、及び領域抽出プログラム
【課題】主要被写体の領域を画像から抽出することができる領域抽出装置、撮像装置、及び領域抽出プログラムを提供する。
【解決手段】領域抽出装置140は、撮像された画像から被写体領域を抽出する領域抽出部142と、前記撮像された画像の画角中心を含む第1領域と前記被写体領域とが重なる部分の面積と、前記第1領域または前記被写体領域の面積との面積比が所定値以上となる主要被写体領域が在るか否かを判定する領域処理部143と、領域処理部143により、前記主要被写体領域が在ると判定された場合、前記主要被写体領域を示す情報を記憶部に記憶させる優先度設定部144と、を備える。
(もっと読む)
画像処理プログラム、画像処理装置及び画像処理方法
【課題】撮影画像に被写体以外の物体の画像が含まれているか否かを正確に判定できるようにする。
【解決手段】スタンド型イメージスキャナ50の画像撮影部71は置台を撮影し、撮影画像を画像処理装置10の撮影画像記憶部61に格納する。輪郭抽出処理部63は、撮影画像記憶部61に格納されている撮影画像から輪郭画像を抽出し、それを輪郭画像記憶部62に格納する。円形度、直線数演算部64は、輪郭画像記憶部62に格納されている輪郭画像を基に輪郭画像の円形度と輪郭画像を構成する直線の本数を求める。手写り判定部65は、その求められた円形度と直線本数を基に、帳票画像に手写りがあるか否かを判定する。
(もっと読む)
塗布状態検査装置及び方法並びにプログラム
【課題】装置を複雑化することなく、高速に処理することができ、かつ、外乱光による誤認識の発生を防止することができる塗布状態検査装置を提供する。
【解決手段】塗布状態検査装置1は、シール剤Sが塗布されたワークWの上方に、撮像装置3に近接して設置された照明装置2と、該照明装置2の照明状態・消灯状態の各々でシール剤S及びワークWを撮像する撮像装置3と、シール剤Sが正常に塗布されているか画像検査を行う処理装置4とを備える。画像生成部5−1は、照明装置2の点灯状態・消灯状態で撮像装置3により撮像された各画像の輝度値を減算することにより、外乱光の影響を除去した検査画像を生成する。画像判定部5−2は、検査画像からシール剤Sの塗布状態が正常であるか否かを判定する。
(もっと読む)
人物管理装置および人物管理方法
【課題】人の手を介することなく、人物の身なりが適切であるか否かを判定する。
【解決手段】人物管理装置1は、撮影画像を取得する画像取得手段11と、検出対象物の情報を記憶する記憶手段12と、画像取得手段により取得された撮影画像から人物の顔を検出する顔検出手段13と、顔検出手段により検出された顔の座標に基づいて、検出対象物が存在すべき領域を設定する領域設定手段14と、領域設定手段で設定された領域に検出対象物が存在し、検出対象物が適切に装備されているか否かを判定する判定手段15と、判定手段の判定結果に応じた処理を行う制御手段16と、を備える。
(もっと読む)
帳票読取装置、角印検出方法、および、角印検出プログラム
【課題】帳票上の角印の画像を検出することを可能とした帳票読取装置を提供することである。
【解決手段】提案する帳票読取装置は、前記帳票を読み取って得られる帳票画像上の各文字を認識し、前記各文字に対する認識結果および外接矩形を求める文字認識部と、前記文字の外接矩形と一致または略一致する罫線の組み合わせが存在する文字を検出し、その文字と罫線の組み合わせとを合わせて角印の画像として検出する角印検出部と、を有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】高精度かつ処理コストの低い被写体検出器を提供する。
【解決手段】入力画像に対して検出ウィンドウを走査する検出ウィンドウ走査手段と、検出ウィンドウ内の画像が、検出対象の被写体全体か否かを判定し、被写体候補を出力する被写体全体判定手段と、被写体候補同士に所定の重なりがある場合に重なりのある前記被写体候補の組みを出力する被写体候補重複判定手段と、予め検出ウィンドウ上に1つまたは複数の部分領域を設定し、各々の領域が被写体の一部であるか否かを判定する被写体部分判定手段と、被写体候補重複判定手段が出力する被写体候補の組みについて、被写体部分判定手段の結果に基づき被写体か否かを総合的に判定する被写体判定手段を有し、検出ウィンドウ走査手段は、入力画像に対する検出ウィンドウを相対的に複数のサイズで走査し、被写体候補の組みはそれぞれの組みにおいてサイズの異なる被写体候補を少なくとも1つ有する。
(もっと読む)
走行支援装置
【課題】特殊な照明装置を追加するといったコストアップを招くことなく、周期環境が暗い状況であっても障害物の検出精度の向上を図る。
【解決手段】光源検出部12は、光源対象領域Rdにおいて後続車両のヘッドライト(光源)に相当する面積を光源面積として算出する。そして、閾値算出部14は、算出した光源面積に応じて、後続車両検出部15において利用される差分法の閾値を設定する。この場合、後続車両検出部15は、撮像画像Ipにおいて検出領域R1,R2を設定し、評価パラメータである差分法の閾値に基づいて撮像画像を評価することにより、検出領域R1,R2内における障害物(併走車両)を検出する。
(もっと読む)
画像処理装置、画像処理システム及び画像処理方法
【課題】認識処理を軽減することを目的とする。
【解決手段】第一の撮像手段で撮像された画像を取得する取得手段と、取得手段で取得された画像から物体領域を検知する検知手段と、画像中の第一の撮像手段と第二の撮像手段との共有領域に、検知手段で検知された物体領域がある場合、共有領域の物体認識処理を画像処理装置で行うか、第二の画像処理装置で行うか否かを判断する判断手段と、判断手段において画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲に設定し、判断手段で第二の画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲から共有領域を除いた領域に設定する設定手段と、設定手段で設定された物体認識範囲に物体が写っているか否か物体認識を行う認識手段と、を有する。
(もっと読む)
電子機器及び抽出方法
【課題】動画像から、ある動きをする物、人、動物などを簡便に抽出する。
【解決手段】電子機器1は、オブジェクトの動きを表現するリズム情報の類似度に基づいて動画像からオブジェクトを抽出する電子機器であって、オブジェクトの抽出に用いる抽出用リズム情報を取得する抽出用リズム情報取得部40と、抽出用リズム情報取得部40によって取得された抽出用リズム情報と、動画像内のオブジェクトのリズム情報との類似度を算出する算出部60と、算出部60によって算出された抽出用リズム情報との類似度が所定の閾値以上であるリズム情報として当該動きが表現されているオブジェクトを動画像から抽出する抽出部70とを備える。
(もっと読む)
画像監視装置
【課題】監視空間を撮像して顔を隠した不審者の存在を検出する画像監視装置に関し、フルフェイスヘルメットと人物の後頭部とを区別して判定できる画像監視装置を提供する。
【解決手段】監視空間においてヘルメットなどにより顔を隠蔽した不審者を検出する画像監視装置3であって、周期的に前記監視空間を撮像して監視画像を取得する撮像部31と、予め顔特徴情報を記憶する記憶部33と、前記監視画像から人物の頭部に相当する入力頭部領域を抽出する頭部抽出部342と、前記入力頭部領域が顔の特徴情報を有しているか前記顔特徴情報を用いて判定する顔特徴判定部343と、前記入力頭部領域に所定面積以上の高輝度領域が存在するか判定する高輝度領域抽出部344と、前記顔特徴判定部にて顔の特徴情報無しと判定され、且つ前記高輝度領域抽出部にて高輝度領域の存在が判定されると、顔を隠蔽した不審者と判定する不審者検出部345とを備える。
(もっと読む)
画像処理装置、画像符号化システム及び画像復号システム
【課題】ユーザの指定なしに、画像データの特徴部分を表す画像データを生成する。
【解決手段】画像処理装置10は、特徴量検出部14と、最適領域生成部162と、出力データ生成部18と、を備える。特徴量検出部14と、入力画像データの特徴部分を検出し、検出した特徴部分を含む特徴領域の位置を示す特徴領域情報を生成する。最適領域生成部162は、特徴領域情報に基づいて、前記特徴領域のサイズに応じた最適領域の位置を示す最適領域情報を生成する。出力データ生成部18は、最適領域情報に基づいて、入力画像データのうち最適領域の画素を抽出し、抽出した画素に基づいて出力画像データを生成する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
オブジェクト検知装置、およびオブジェクト検知プログラム
【課題】オブジェクトの検知精度を確保し、且つ、本体のコストダウンを図ったオブジェクト検知装置を提供する。
【解決手段】オブジェクト検知装置1は、画像処理部3が予め定めた第1の時間に渡って撮像装置10が監視エリアを撮像したフレーム画像から第1の時間平均画像を生成するとともに、予め定めた第2の時間に渡って撮像装置が監視エリアを撮像したフレーム画像から第2の時間平均画像を生成する。第1の時間は、第2の時間よりも長い。また、画像処理部3は、第1の時間平均画像と、第2の時間平均画像との差分画像を生成する。画像処理部3は、差分画像にあらわれたオブジェクトの形状や大きさ等から、そのオブジェクトの種類を判別する。
(もっと読む)
顔検出方法
【課題】単独の検出器でも、隠れが生じている顔を高い検出率で検出することができる顔検出方法を提供する。
【解決手段】評価対象画像内に設定したROI内に複数の選択領域を設定する。そして、ROI内に画像が顔であるか否かを判定するための1つ以上の画素で構成される複数の特徴量領域を設定し、特徴量領域内の評価対象画像に対して所定の評価を行ってスコアを求める。そして、選択領域と特徴量領域との重なりの程度に応じてスコアを選択領域に按分し、これらの処理を複数の特徴量領域の全てにおいて実行する。その後、複数の特徴量領域において按分されたスコアを集計し、選択領域が顔であるか否かを判定し、複数の選択領域でそれぞれ顔であるか否かを判定した結果に応じてROIが顔であるか否かを判定する。
(もっと読む)
携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する方法
【課題】携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する。定規で測るなどの不便を解消し、迅速且つ簡便に物体の正確な実際大きさを測定する。
【解決手段】携帯端末機に備えられたカメラを利用して撮影された物体イメージの大きさ及び物体とカメラとの間の距離を測定し、焦点距離などのカメラの特性と測定された値を利用して撮影された物体の実際大きさを算出する。手順は、(1)携帯端末機に備えられたカメラを利用して撮影された物体イメージを認識する段階と、(2)前記段階(1)で認識された物体イメージの大きさを測定する段階と、(3)前記物体と前記カメラとの間の距離を測定する段階と、(4)前記カメラの特性、前記段階(2)で測定された物体イメージの大きさ、及び前記段階(3)で測定された前記物体と前記カメラとの間の距離を利用して前記物体の実際大きさを算出する。
(もっと読む)
動画処理装置及び動画処理方法
【課題】大気モデルに基づいて霧の天候のビデオを明瞭化させ、画面の視程を拡大し、かつ、画像のリアルタイム処理の要求を充分に満たす動画処理装置及び動画処理方法を提供する。
【解決手段】本発明の動画処理装置は、ビデオの霧除去過程において、ビデオを、メーンフレームとなるキーフレームと、サブフレームとなるノーマルフレームとに区分する。キーフレームに対し、距離パラメータとなるt(X)と天空点パラメータAとを改めて算出し、ノーマルフレームに対し、Aを算出せずキーフレームのAを利用する。ノーマルフレームの背景部分に対し、キーフレームに対応する領域のt(X)を利用し、ノーマルフレームの前景部分に対し、t(X)を改めて算出する。
(もっと読む)
41 - 60 / 576
[ Back to top ]