
Fターム[5L096GA02]の内容
Fターム[5L096GA02]の下位に属するFターム
Fターム[5L096GA02]に分類される特許
41 - 60 / 245
画像処理装置及び画像処理プログラム
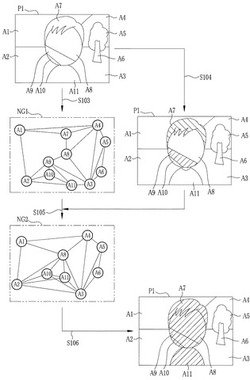
【課題】 前景領域内に影などの暗部領域が生じる場合であっても、得られた画像を前景領域と背景領域とに適切に領域分割する。
【解決手段】 画像に対して設定される複数の基準領域のうち、所定の条件を満たす基準領域を該当領域として検出する検出手段と、複数の基準領域のうち、該当領域を除いた基準領域における隣接状態を特定する特定手段と、特定手段により特定された該当領域を除いた基準領域における隣接状態に基づいて、画像に含まれる構成要素毎に領域分割する領域分割手段と、を備えたことを特徴とする。
(もっと読む)
映像解析方法およびシステム

【課題】歩行者を時系列的に撮像することにより、該歩行者を的確に分類する。
【解決手段】映像シーケンスの特徴を分類する方法は、前記映像シーケンスのフレームの、前記特徴を含んでいる対象領域を選択すること、前記対象領域を複数のセルに分割すること、前記セルによりオプティックフローのヒストグラムを計算すること、セル対についての前記オプティックフローのヒストグラムを比較すること、前記比較の結果の少なくとも一部に基づいて前記特徴をクラスに割り当てること、を含む。
(もっと読む)
画像処理装置、その処理方法及びプログラム
【課題】対象物の検出精度を向上させる技術を提供する。
【解決手段】画像処理装置は、検出すべき対象物を含む画像から輝度情報に基づいて第1の特徴量を取得する第1の特徴量取得手段と、第1の特徴量に基づいて画像から領域を検出するとともに、当該領域における対象物に対する尤度を算出する尤度算出手段と、算出された尤度が第1の閾値以上である領域を対象物が存在する対象物領域として検出するとともに、算出された尤度が第1の閾値未満で且つ第2の閾値以上である領域を対象物が存在する可能性のある候補領域として検出する第1の検出手段と、候補領域について第1の特徴量とは異なる第2の特徴量を取得する第2の特徴量取得手段と、第2の特徴量の値に基づいて各候補領域の尤度を補正する補正手段と、補正された尤度が第1の閾値と第2の閾値との間の値を持つ第3の閾値以上となる候補領域を対象物領域として検出する第2の検出手段とを具備する。
(もっと読む)
煙検出用周波数成分特定方法、および煙検出装置
【課題】フーリエ変換処理を用いることなく、煙のゆらぎスペクトルの周波数成分を簡易的に求め、気流に流される煙を検出する。
【解決手段】監視カメラにより時系列で撮像された複数の画像からなる時系列データに基づいて、注目領域において、異なるサンプリング間隔によるフレーム差分画像を生成する差分画像生成手段21と、異なるサンプリング間隔で生成されたそれぞれのフレーム差分画像ごとに、注目領域の差分量を算出する差分量算出手段22と、算出されたそれぞれの差分量の中で、最大となる差分量に対応するサンプリング間隔の逆数を、注目領域の時間スペクトルのピークを示す周波数成分として特定する対象周波数成分特定手段23とを備える。
(もっと読む)
形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置
【課題】形状ベースマッチング処理における精度や処理時間、ロバスト性等の特性に関して最適化されたテンプレートデータを作成するための形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置を提供する。
【解決手段】形状ベースマッチング処理を用いて電子部品2の搭載位置決めをする部品実装装置において、サーチ評価画像を取得し、このサーチ評価画像をもとに上記パラメータを調整する。このとき、先ず、位置決め処理の精度が、ユーザが指定した要求精度を満たすようにパラメータを設定する。次に、位置決め処理のタクトタイムが短縮する方向に上記パラメータを徐変しながら精度を評価し、当該精度が要求精度を保てる限界値を最適なパラメータとして取得する。この最適パラメータ取得処理を、部品ロットの切り替わりに際し必要に応じて行う。
(もっと読む)
店舗システムおよびプログラム
【課題】基準を外れたものを不良品として判断する。
【解決手段】撮像手段が撮像した画像を出力する画像出力手段1613と、出力された画像の特徴量を読み取ることによって特定の物体を認識する物体認識手段611と、認識された物体について予め決められた当該物体の基準画像に対してどの程度類似しているかを示す類似度を算出し、算出した類似度が予め定められた閾値を超えているか否かを判定する類似度判定手段613と、算出した類似度が予め定められた閾値を超えていないと判定した場合、物体が正規品と認識されないものであることを報知する不良品報知手段614と、を備える。
(もっと読む)
情報処理装置、およびその処理方法
【課題】画像データ中のサンプリングデータを用いて、高速に特定のパターンの識別を行い、種々の変動に対しても高速に識別を行う情報処理装置およびその方法を提供する。
【解決手段】画像処理装置は、画像における少なくとも1つの特定パターンに関して判定のための情報を登録し、画像データを入力し、入力した画像データから所定の特徴の分布を抽出し、特徴の分布を示す第1特徴分布マップを生成し、第1特徴分布マップの局在性を緩和させる変換を第1特徴分布マップに適用して第2特徴分布マップを生成し、第2特徴分布マップ上のサンプリングデータと登録された情報とを用いて、画像データが前記特定パターンのうちいずれのパターンかを判定する。
(もっと読む)
車線推定装置
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
車線推定装置
【課題】走行安定性と車線追従制御性との双方を満足させることのできる目標走行線を設定する。
【解決手段】車線候補点設定部9aは撮像手段1で撮像した画像から走行車線の内側エッジを検出し車線候補点Pをプロットする。曲線近似処理部9bは車線候補点Pの点列に基づき、最小二乗法から推定車線Lpを求める車線推定式(y=ax2+bx+c)のパラメータ係数a,b,cを求め、今回の演算時を基準として設定時間幅tw前におけるパラメータ係数aの点列から曲線近似式を求め、この曲線近似式から設定時間進み後の予測パラメータ係数a’を設定する。車線位置設定部9cは予測パラメータ係数a’を、車線推定式に代入して設定時間進みtf後の推定車線Lpを求める。
(もっと読む)
人物属性推定装置、人物属性推定方法、及びプログラム
【課題】 顔画像から人物の属性を精度よく推定することが可能な人物属性推定装置等を提供する。
【解決手段】 人物の属性を推定するための特徴量として、顔領域のシワ特徴量、シミ特徴量、及び唇特徴量を算出する。シミ特徴量は、肌マスクによるマスク処理後画像とこれを更にスムージング処理したぼかし画像との差分を用いてブロック毎に算出する。シワ特徴量は肌マスクによるマスク処理後画像からシワの強度と方向とをブロック毎に算出する。唇特徴量は、肌マスクを用いて抽出される唇領域について、元の顔領域内の基準色に対する色の比較値として算出する。このようにして算出されたシミ特徴量、シワ特徴量、及び唇特徴量を用いることにより年齢・性別等の人物属性を精度よく推定でき、また環境変動によるロバスト性を向上できる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】より精度よく被写体を検出できるようにする。
【解決手段】背景領域判定部102は、撮像部101により得られた画像から前景領域及び背景領域を判定し、前景領域膨張部103は、背景領域判定部102により判定された前景領域を膨張する。被写体検出部104は、前記得られた画像から被写体を検出する際に、前景領域膨張部103により膨張された前景領域の特徴量を用いて被写体を検出するようにする。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】周囲の画素と異なる画素値の異常部を精度良く検出すること。
【解決手段】本発明のある実施の形態の画像処理装置10において、演算部20は、画像内の検査対象領域の画素の画素値をもとに、検査対象領域の各画素の画素値に対して、検査対象領域内で連続的となる近似値算出部21と、近似値が検査対象領域の画素値に対して妥当か否かを評価する妥当性評価部22と、妥当性評価部22が近似値を妥当でないと評価した検査対象領域を分割する領域分割部23と、分割後の各領域を新たな検査対象領域に設定し、処理の繰返しを制御する対象領域再設定部24と、画像内の画素の画素値と妥当性評価部22が妥当と評価した近似値とをもとに異常部を検出する異常部検出部25とを備える。
(もっと読む)
直線検知装置
【課題】解像度を劣化させることなく計算量を低減することができ、しかも、左右の対称性を維持することができる直線検知装置を提供する。
【解決手段】画像のXY平面から複数の候補点を抽出する候補点抽出部2と、XY平面に置かれた原点を基準に各候補点をハフ変換する候補点ハフ変換部3と、ハフ変換で得られた各正弦波に従いθρ平面としてメモリ上に確保された二次元配列の配列要素に投票する配列投票部4と、投票値が閾値を超える配列要素からXY平面上の直線を検知する直線検知部5と、検知された複数の直線から消失点を推定する消失点推定部6と、消失点に画像の原点を置き直す消失点原点化部7とを備える。
(もっと読む)
特徴量取得装置、特徴量取得方法、類似画像検索方法およびプログラム。
【課題】画像データの特徴量を取得する特徴量取得方法において、比較的小さい次元数の特徴量で、画像毎の特徴の違いを適切に反映する特徴量を求められるようにする。
【解決手段】特徴量取得装置1が、前記画像データの画素値の平均および分散を算出し、算出した平均および分散に基づく特徴量を求める特徴量算出部314を具備する。データの特性を端的に示す指標である平均および分散に基づいて特徴量を算出することにより、画像毎の特性の違いを適切に反映し、比較的次元数の少ない特徴量を得ることができる。
(もっと読む)
特徴点抽出方法、特徴点抽出装置、プログラム及び記録媒体
【課題】低コントラスト画像の特徴点を抽出する。
【解決手段】本発明に係る特徴点抽出方法は、画像を受信する受信ステップ(101)と、上記画像の複数の画素について、特徴点を示す特徴計測を算出する特徴計測算出ステップ(102〜107)と、上記複数の画素の1つに関する統計的計測を算出する統計的計測算出ステップと、上記統計的計測に基づいて、閾値を決定する閾値決定ステップと、上記閾値と上記特徴計測とに基づいて、上記複数の画素の1つが上記特徴点であるか否かを決定する特徴点決定ステップ(108)とを含んでいる。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、測定を迅速且つ確実に行うことのできる画像測定装置及び画像測定方法を提供する。
【解決手段】ワークを撮像する撮像ユニット17と、撮像されたワークの画像を取り込む取り込みプログラム431と、取り込まれた画像を2値化する2値化プログラム433と、2値化された画像内に存在する図形情報を認識し、当該図形情報の輪郭線を検出する輪郭線検出プログラム434と、検出された輪郭線に基づいて図形情報の角点を検出する角点検出プログラム436と、検出された角点を含む輪郭線上に、エッジ検出ツールを設定する設定プログラム437と、設定されたエッジ検出ツールにより、図形情報の測定を行う測定プログラム438と、を備える。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】被写体の個人差に依存せずに高精度に視線方向を推定する。
【解決手段】被写体の視線方向を検出する情報処理装置であって、撮像部により撮像された被写体の画像を取得する取得部と、画像から被写体の顔領域を検出する顔領域検出部と、被写体の目領域を検出する目領域検出部と、顔領域検出部により検出された顔領域と、目領域検出部により検出された目領域との画像内における位置関係から、顔領域について高解像度の正規化画像と低解像度の正規化画像とを生成する正規化画像生成部と、低解像度の正規化画像から顔領域に存在する顔の向きを示す第1特徴量を抽出する第1抽出部と、高解像度の正規化画像から目領域に存在する目の向きを示す第2特徴量を抽出する第2抽出部と、第1特徴量および第2特徴量から被写体の視線方向を推定する推定部と、を備える。
(もっと読む)
物体識別装置
【課題】差分偏光度を用いて撮像画像中における識別対象物の画像領域を識別することが困難な状況下であっても、その撮像画像中の識別対象物の画像領域を高い精度で識別することを課題とする。
【解決手段】撮像領域内のP偏光画像及びS偏光画像を偏光カメラ10で撮像し、画素ごとに、P偏光画像及びS偏光画像間における輝度合計値(モノクロ輝度)と、当該輝度合計値に対するP偏光画像及びS偏光画像間における輝度差分値の比率を示す差分偏光度を算出する。そして、差分偏光度が所定の差分偏光度閾値以上であれば、差分偏光度画像処理部15が算出した差分偏光度を用いて識別対象物である路端エッジ部を識別し、そうでなければ、モノクロ画像処理部13が算出したモノクロ輝度を用いて路端エッジ部を識別する。
(もっと読む)
衝突時間算出装置、衝突時間算出方法及びプログラム
【課題】適切なタイミングで、ドライバーに警報を発する。
【解決手段】自車に接近する接近車両についてのオプティカルフローを用いて、接近車両が、自車に搭載された撮影装置20の光学中心を含む面に到達するまでの到達時間を算出する。そして、この到達時間に基づいて、接近車両が自車に衝突するまでの衝突予測時間を算出する。この衝突予測時間は、接近車両が自車から離れていても、接近車両の移動軌跡を示すベクトルの大きさと、オプティカルフローの大きさとの間に生じる誤差の影響を大きく受けることなく算出される。したがって、事前に自車と接近車両とが衝突するまでの衝突予測時間を算出することで、適切なタイミングで、ドライバーに衝突を回避するための警報を発することが可能となる。
(もっと読む)
画像処理装置、制御方法、及びプログラム
【課題】カメラなどの撮影装置で文書を撮影した場合、傾きから文書に台形状の歪みが発生する。これを補正するために文書枠を検出する必要があるが、文書領域外に直線成分が多数ある場合などには、文書枠の推定が困難である。
【解決手段】直線成分の組み合わせから文書枠候補を推定する際に、直線の直交方向への色の勾配を加味することで、余分な文書枠候補を絞り込むことを可能とする。
(もっと読む)
41 - 60 / 245
[ Back to top ]