
Fターム[5L096GA02]の内容
Fターム[5L096GA02]の下位に属するFターム
Fターム[5L096GA02]に分類される特許
101 - 120 / 245
較正された移動カメラを使用して特徴奥行きを動的に推定するための方法および装置

【課題】ロボットマニピュレータの運動計画、障害検出および診断、または画像ベースの視覚サーボ制御に使用することができる方法および装置を得る。
【解決手段】方法および装置は、最初に特徴の座標を推定して透視特徴画像のシーケンスを生成することによって、移動カメラによってシーンから取得される画像シーケンス内で観測される特徴の奥行きを推定する。透視特徴画像のシーケンスに微分方程式のセットを適用して、カメラの直線速度および角速度のベクトルならびにカメラの焦点距離のみを使用して、奥行きに対する低次元動的状態推定量を形成する。カメラをロボットマニピュレータのエンドエフェクタ上に搭載することができる。カメラの速度は、ロボット関節符号化器の測定値および既知のロボット動力学によって求められる。
(もっと読む)
環境認識装置

【課題】画像中から道路標識等における有意情報を抽出し、その内容をリアルタイムで的確に認識することが可能な環境認識装置を提供する。
【解決手段】環境認識装置1は、画素pごとに画像データDを有する画像Tを撮像する撮像手段2と、画像Tの各画素pの実空間上の距離Zを算出する距離検出手段6と、画像T上で隣接する複数の画素pを各画像データDに基づいて当該複数の画素pを1つのグループgに統合する統合処理手段10と、グループgに属する画素pの実空間上の距離Zに基づいてグループgの実空間上の大きさを算出する算出手段11と、実空間上の大きさが所定の大きさであるグループgに対して、グループgとテンプレートTeのいずれかを正規化して適用してテンプレートマッチングを行い、グループgの有意情報を認識するマッチング処理手段12とを備える。
(もっと読む)
画像処理装置
【課題】複数フレームに跨る画像ブロックの動き検出する場合に、その動き検出の算出を速めて、画像処理を高速化できる画像処理装置を提供する。
【解決手段】特徴点マップ15をラスタ方向に検索し、そこに特徴点が存在している場合には、その特徴点の識別番号を利用し、動き情報テーブル17の識別番号に該当するテーブルブロックを見いだす。このテーブルブロックには、次追跡ブロックID(即ち次に処理すべきテーブルブロックを示す番号)が記憶されているので、次に、次追跡ブロックIDが示すテーブルブロックのデータ(特徴点座標や次追跡座標)を利用して、更に次追跡座標や動きベクトルを算出することができる。
(もっと読む)
車線認識装置及び方法
【課題】 道路上に不検知要素がある場合であっても、安定して車線境界を認識し続ける。
【解決手段】 車線区分線候補を抽出する車線区分線候補抽出部21と、各車線区分線候補の種類を判定する車線区分線判定部22と、各車線区分線候補の相対関係を決定する相対関係決定部23と、車両が多重線区間に進入する前に車線境界として検出していた車線区分線と最も連続性の高い車線区分線候補と他の車線区分線候補との相対関係を記憶する相対関係記憶部25と、車線区分線候補の組み合わせ及び決定された各車線区分線候補の相対関係と、記憶された相対関係とに基づいて車線境界を判断する車線境界判断部24を備える。
(もっと読む)
領域抽出装置、領域抽出方法及び領域抽出プログラム
【課題】効果の高い初期領域を探すことで正確に所望の領域を抽出することができる。
【解決手段】画像を取得し(ステップS10)、入力された画像に撮影された物体の中心と仮定する位置に仮初期点を設定し(ステップS12)、仮初期点を中心とした大きさの異なる複数の仮初期領域を設定する(ステップS14)。複数の仮初期領域のうち、所望の仮初期領域を選択し、選択した仮初期領域の前景と背景とのそれぞれについてヒストグラムを生成、正規化し(ステップS16)、正規化されたヒストグラムに基づいて分離度を算出する(ステップS18)。全ての仮初期領域に対して算出された分離度のうち最も値が大きい分離度が算出された仮初期領域を初期領域と決定し(ステップS24)、この初期領域を用いて領域抽出を行う(ステップS26)。
(もっと読む)
人数計測装置、方法及びプログラム
【課題】人混みを撮像した画像に基づいて、人混みに含まれる人数を計測することができるようにすること。
【解決手段】人数計測装置は、複数の人を撮像した動画像の1フレームを構成する画像を入力し、入力した画像に対して、人を撮像した場合に画像の各部において期待される頭部の大きさに応じた頭部モデルを位置をずらしつつ設定する頭部モデル設定部と、設定された頭部モデルに基づいて、画像に含まれる人の頭部を抽出する頭部抽出部と、動画像に含まれる複数の画像の間で抽出された頭部を互いに関連付ける頭部関連付け部と、互いに関連付けられた頭部の軌跡の本数に基づいて動画像に含まれる人数を計測する人数計測部と、を備えている。
(もっと読む)
ビジョン・オン・チップ・プロセッサを用いてバーコードを捕捉および検出するためのシステムおよび方法
本発明は、CPU制御されたビジョン・システム・オン・チップ(VSoC)アーキテクチャに基づく効率的処理システムを用いてIDの特徴、例えば1Dバーコードを捕捉、検出および抽出するためのシステムおよび方法を提供する。本発明は、例示的に単一命令複数データ処理(SIMD)アーキテクチャで構成された線形アレイプロセッサ(LAP)を提供し、そこにおいてピクセルアレイの行の各ピクセルは類似の幅のアレイで個々のプロセッサに差し向けられる。ピクセルデータは、潜在的にID状の特徴を含んでいる関心領域(ROI)の大まかな検出と追跡を実行するフロントエンド(FE)プロセスで処理される。ROI検出プロセスは近隣操作におけるLAPの効率を最適化するために2部分で、すなわちピクセルアレイから画像ピクセルを読み出す間に起こる行処理ステップと、典型的に読出しが行われた後に起こる画像処理ステップで行われる。IDを包含したROIのピクセルアレイに対する相対運動が追跡および予測される。任意的にあるバックエンド(BE)プロセスは予測されたROIを用いて画像捕捉後に特徴抽出を実行する。特徴抽出は候補ID特徴を導出し、これらの候補ID特徴は検証ステップによって検証され、検証ステップはIDを確認し、精緻化されたROI、向きの角度および特徴セットを生み出す。これらの候補ID特徴は復号プロセッサまたはその他のデバイスに伝送される。 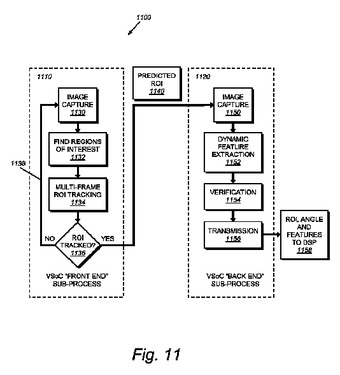 (もっと読む)
(もっと読む)
レーン境界線検出装置、境界線検出プログラム、および逸脱警報装置
【課題】撮像画像中から車両が走行する走行レーンの境界であるレーン境界線を検出するレーン境界線検出装置において、レーン境界線を精度よく検出できるようにする。
【解決手段】レーン境界線を検出する際には、逸脱警報処理にて、撮像画像中において当該車両の走行方向に沿って並ぶ複数のエッジ成分を表すレーン境界線候補毎に、各レーン境界線候補がレーン境界線である可能性の高さを表す確からしさを、各レーン境界線候補の形状に基づいて算出する(S320)。そして、当該車両に先行して走行する車両を表す先行車両の位置の近傍にあるレーン境界線候補に対応する確からしさをより高い値に変更し(S330,S340)、最も高い確からしさに対応するレーン境界線候補を、レーン境界線として特定する(S380)。よって、先行車両の位置を考慮してレーン境界線を検出するので、レーン境界線を精度よく検出することができる。
(もっと読む)
顔認識装置、顔認識方法及び顔認識プログラム
【課題】
顔部位の隠蔽物を検出することにより隠蔽されている顔部位を特定し、顔認識の精度を向上させる顔認識装置を提供する。
【解決手段】
顔認識装置10は、撮影手段100による撮像画像から鼻領域検出手段2が鼻領域を検出し、鼻領域の未検出時にはマスク着用判断手段3が撮像画像の輝度値からマスク着用を判断し、マスク領域検出手段31がマスク領域を検出し、マスク内鼻領域検出手段32がマスク領域から鼻領域を検出し、顔認識手段5が検出された鼻領域から眼領域を検出して顔認識を行うことから、マスク領域を検出することによりマスク領域をも利用して鼻領域に基づいて顔認識を行うこととなり、顔認識の精度を向上させることができる。
(もっと読む)
円形の幅寸法測定装置
【課題】円形状のエッジを自動検出して円形を求め、該円形の幅寸法の測定を可能にする円形の幅寸法測定装置を提供する。
【解決手段】全体として1または2以上の層を有する円形状の物体を上方から撮像する撮像手段と、前記撮像手段によって得られた画像から前記円形状の仮中心点を求める手段と、前記仮中心点から円形の複数のエッジを求める手段と、前記円形の複数のエッジから仮想円の中心を求める手段と、前記仮想円の中心から仮想円を求める手段と、前記仮想円から検出円を求め、該検出円の幅を円形状の幅寸法とする幅寸法算出手段とを有することを特徴とする円形の幅寸法測定装置。
(もっと読む)
画像処理装置および画像処理方法
【課題】動画像内で動きを有する対象物に対する加工処理は困難である。
【解決手段】画像処理装置70は、パーティクルフィルタを用いて動画像内の対象物の輪郭線を取得する追跡装置14、ユーザが画像処理装置70に対し、処理の開始、終了の指示、加工処理の内容の選択を行う入力部72、跡装置14から追跡結果である対象物の輪郭線を表す曲線のデータを取得し、爪や指など対象部位の位置を特定する部位特定部74、部位特定部74が特定した対象部位に対し、部位が爪であればネイルアートの画像を合成するなど所定の加工処理を施し、対象物の動きに応じて加工処理の態様を変化させる加工処理部76、加工処理の結果、得られる画像を表示したり動画データとして記憶する出力部78を含む。
(もっと読む)
画像処理装置および画像処理方法
【課題】視覚追跡において形状変化を伴う対象物の追跡処理は困難である。
【解決手段】まず撮像した動画像データをフレームごとに読み出し、追跡対象の有無により追跡開始の判定を行う(S20、S22)。追跡開始が判定されたら当該画像フレームのエッジ画像を生成する(S24)。一方、追跡対象の形状を表すBスプライン曲線の制御点列を、あらかじめ準備した複数の基準形状を表すBスプライン曲線の制御点列の線形和で表現する際に各制御点列にかかる係数のセットの空間にパーティクルを分布させる(S26)。さらに形状空間ベクトルの空間においてもパーティクルを分布させ(S28)、各パーティクルの尤度観測、確率密度分布を取得する(S30)。確率密度分布によって各パラメータに重み付け平均して得られる曲線を追跡結果として生成する(S32)。
(もっと読む)
画像からの深度マップの作成
複数の画像に対して複数の深度マップを生成する方法は、第1の画像を受信するステップと、前記第1の画像により規定されるショットに関する情報を取得するステップと、第1のスキーマによって前記第1の画像に対する深度マップを生成するステップと、第2の画像を受信するステップと、前記第2の画像により規定されたショットに関する情報を取得するステップと、前記第1の画像と前記第2の画像との間の前記取得された情報の変化を検出するステップと、第2のスキーマによって前記第2の画像に対する深度マップを生成するステップとを有し、前記第2のスキーマは、前記第1のスキーマの複雑さとは異なる複雑さを持つ。前記方法は、第1及び第2の深度モデルにアクセスするステップを有することができる。一実施例において、前記第1のスキーマは、前記第1の深度モデルを有し、前記第2のスキーマは、前記第2の深度モデルを有し、第2の実施例において、前記第1のスキーマは、前記第1の深度モデルを有し、前記第2のスキーマは、前記第1及び第2の深度モデルの組み合わせを有する。  (もっと読む)
(もっと読む)
検出窓走査により画像内の物体を認識および位置特定するためのデータストリームパイプラインアーキテクチャを有する装置
本発明は、検出窓を走査することにより、画像内の物体を認識および位置特定する装置に関する。
本発明によれば、装置(1)は、同時ハードウェアタスク用のパイプライン形式で設計されたデータストリームアーキテクチャを含み、このアーキテクチャは、
各検出窓に対して記述子(D)を生成する手段(4、5、6、9)と、
各記述子に対して方位勾配のヒストグラムを決定するヒストグラム決定部(7)と、
N個の並列の処理ユニット(UT)であって、各処理ユニットは、各記述子に関連付けられたパラメータに応じてヒストグラムを解析することにより、関係する記述子が認識対象物体の少なくとも一部分を含む確率を表すパーシャルスコアを与えることが可能であり、各検出窓のパーシャルスコアの合計は、検出窓(F1、F2、…、FN)が認識対象物体を含む確率を表すグローバルスコア(S1、S2、…、SN)を与える、処理ユニット(UT)と、を含む。  (もっと読む)
(もっと読む)
円検出装置
【課題】入力画像から円を検出する処理が高速に行え、且つ、メモリの使用量が少なくて済む円検出装置を提供する。
【解決手段】円検出装置Aは、撮像手段1からの入力画像に対して微分処理を行い、微分強度が所定のしきい値よりも大きいエッジ点を抽出するエッジ画像抽出手段3と、抽出されたエッジ点に直線検出用のハフ変換処理を施して(ρ,θ)パラメータ空間に投票処理を行う際に、エッジ点におけるエッジ方向を中心とした所定角度範囲のθにのみ投票を行う投票手段4と、(ρ,θ)パラメータ空間から投票されたセルを抽出する投票セル抽出手段5と、投票セル抽出手段5によって抽出されたセル群からθ方向に連続する2本の正弦波状の略平行な曲線を求めるとともに、当該2本の曲線のρ方向間隔から探索対象の円の直径を求める直径検出手段6と、2本の曲線から等距離にある中間線の形状から円の中心位置を求める中心位置検出手段7とを備える。
(もっと読む)
画像処理方法およびそのコンピュータプログラム
【課題】入力されたカラー画像から特定の色を有する領域を的確に分離する画像処理方法およびコンピュータプログラムを実現する。
【解決手段】画像処理方法は、カラー画像上において特定の色の領域にグループ分けされていない対象ピクセルおよびその隣接ピクセルの明度を取得するステップと、対象ピクセルの明度と各隣接ピクセルの明度との各x方向相対量および各y方向相対量を算出するステップと、各x方向相対量および各y方向相対量を減算して得られるx方向明度勾配およびy方向明度勾配を算出するステップと、RGBの各要素の明度ごとのx方向明度勾配およびy方向明度勾配をそれぞれ加算し色傾向ベクトルを算出するステップと、色傾向ベクトルの指向する向きに位置する隣接ピクセルのうち特定の色の領域に属するものと決定済のグループ分け済みピクセルが含まれる領域に、対象ピクセルは属するものであると決定するステップと、を備える。
(もっと読む)
学習装置および方法、認識装置および方法、プログラム、並びに記録媒体
【課題】処理速度を向上させた画像認識を行う。
【解決手段】ピラミッド画像生成部20は、入力された画像から、複数の解像度(スケール係数)が異なる画像を生成する。スケール係数の異なる画像に対して、フィルタ処理が施される。フィルタは、例えば、ガウス幅σ=1のガウス関数のフィルタである。複数の画像に対してフィルタ処理を施すが、ガウス幅の異なる複数のフィルタを用いて処理を行うのではないために、処理の低減をはかることができる。本発明は、画像から対象物を認識する認識装置や認識装置のための学習を行う学習装置に適用できる。
(もっと読む)
時空間画像分離装置、時空間画像分離方法および時空間画像分離プログラム
【課題】時間と空間の双方の情報が加味された時空間画像から、複数の対象領域を適切に分離する。
【解決手段】時空間画像を複数の対象領域に分離するための時空間画像分離装置であって、時系列に連続した前記時空間画像を入力し、記憶手段110に記憶するデータ入力手段100と、時空間画像の各画像フレームの画素ごとに、時間微分と空間微分とを行うことにより画像特徴量を演算する画像特徴量演算手段120と、前記画像特徴量を用いて各画素を、特徴量空間内で複数に分類するクラスタリング手段130と、クラスタリング手段が分類した結果を表示する表示手段140と、を有する。
(もっと読む)
画像処理におけるパターンモデルの位置決め方法、画像処理装置、画像処理プログラム及びコンピュータで読み取り可能な記録媒体
【課題】より高速で精度の高い位置決めが可能なマッチング方法等を提供する。
【解決手段】抽出された輪郭上に、複数の基点を設定すると共に、各基点に対して、基点を通りかつ輪郭と略直交する所定長さの対応点探索ラインを割り当てた登録画像のパターンモデルを構築する工程と、サーチ対象画像を取得すると共に、該サーチ対象画像中に含まれる登録画像に対応する初期位置を取得し、該初期位置に従って、パターンモデルの対応点探索ラインをサーチ対象画像上に重ねるように配置する工程と、サーチ対象画像上の対応点探索ラインに沿った位置におけるエッジ強度及びエッジ角度を用いて、各対応点探索ラインについて、各基点と対応するサーチ対象画像上の対応点を求める工程と、各々基点と基点の対応点との関係を評価値とし、該評価値の累積値が最小又は最大となるように、与えられた初期位置の精度よりも高い精度で精密位置決めを行う工程とを含む。
(もっと読む)
ロボット装置及び物体の位置姿勢推定方法
【課題】物体の位置姿勢を少ない計算時間で、かつ、正確に推定すること。
【解決手段】本発明に係るロボット装置1は、作業環境内に存在する物体との距離を計測してレンジデータを生成する距離センサ101と、生成したレンジデータを形状データ103と照合することによって、物体の形状と位置姿勢を推定する初期照合部102と、物体を撮像した画像データを生成するカメラ部104と、画像データの特徴を抽出する特徴抽出部105と、初期照合部102により推定した物体の形状と位置姿勢を初期値として、特徴抽出部105で抽出した画像データの特徴と、物体の形状と位置姿勢との誤差を評価関数とした最小化問題を解くことで、物体の位置姿勢を推定する姿勢推定部106と、を備えるものである。
(もっと読む)
101 - 120 / 245
[ Back to top ]