
Fターム[5L096GA02]の内容
Fターム[5L096GA02]の下位に属するFターム
Fターム[5L096GA02]に分類される特許
21 - 40 / 245
環境認識装置および環境認識方法
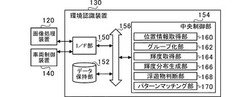
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
芝刈り状況監視機能を有する自動芝刈り機

【課題】走行中の芝刈り状況を監視することが可能な芝刈り状況監視機能を有する自動芝刈り機を提供する。
【解決手段】少なくとも位置検出手段を含む各種センサを有する自律走行型の自動芝刈り機であって、走行車両の駆動系(アクセル)、制動系(ブレーキ)、及び操舵系(ステアリング)のうちの少なくとも一つを自動操作するためのアクチュエータと、アクチュエータにより走行車両を目標地点に移動させるための走行制御ユニットと、走行路面に沿って芝刈りを行うカッティング部と、芝刈り状況を判断するための画像処理ユニットと、センサの情報を基に各ユニットを制御するための各種演算及び演算に対応する処理を行う演算ユニットと、無線通信により演算ユニット及び走行制御ユニットを介して走行車両を遠隔操作するための無線通信手段と、を備える。
(もっと読む)
画像処理方法および監視装置
【課題】監視環境が時々刻々と変化するような場面でも、検出すべき物体の位置や速度と言った属性を正しく計測する。
【解決手段】撮像装置において撮像した入力画像を処理して、入力画像のエッジ情報を抽出し、エッジ情報に基づいてテンプレート画像を作成して記憶し、記憶されたテンプレート画像とその位置情報に基づいてテンプレートマッチング処理を実行し、マッチングに成功したテンプレートはその位置座標を更新し、マッチングに失敗したテンプレートは削除し、テンプレートマッチング処理の結果に基づいて検出すべき物体の位置や速度の少なくとも一つの属性を計測し、検出された物体の危険度を判定するようにする。
(もっと読む)
物体検出方法、物体検出装置および物体検出プログラム
【課題】昼夜の時間帯や天候などの環境変動に如何に関わらず、道路上の落下物を高精度で検出することが可能な物体検出装置を提供する。
【解決手段】検出波長が互いに異なる第1,第2カメラにより撮影した画像をそれぞれの取得画像として取得する第1,第2画像取得手段1,5と、各前記取得画像から道路上の物体の存在を判定する第1,第2物体存在判定手段2,6と、各前記取得画像から道路上の物体の移動状態を検出し、静止物体と移動物体とを判別する第1,第2移動体検出手段3,7と、各前記取得画像から道路上の物体の立体情報を算出する第1,第2立体情報算出手段4,8と、第1,第2物体存在判定手段2,6、第1,第2移動体検出手段3,7、第1,第2立体情報算出手段4,8それぞれにおける処理結果を統合する特徴量統合手段9と、特徴量統合手段9における処理結果の特徴量により落下物の判定を行う落下物判定手段10と、を少なくとも備える。
(もっと読む)
画像処理装置、および画像処理方法
【課題】正確に瞳の領域を検出することができる画像処理装置を実現する。
【解決手段】本発明に係る画像処理装置6は、人物の顔画像から目の特徴を特定する画像処理装置であって、顔画像の目がある目領域を、目における横方向に微分して輝度勾配を求める第1微分部31と、目領域について、輝度勾配を3値化し、左側が右側より明るい境界に対応する第1エッジ点と、左側が右側より暗い境界に対応する第2エッジ点とを、エッジ点として抽出する3値化部32と、ハフ変換を用いて、各エッジ点について、第1エッジ点および第2エッジ点のいずれであるかに応じて、かつ、投票対象である楕円と該エッジ点との位置関係に応じて、楕円に対する投票の重みを変えて投票を行う第1投票部33と、第1投票部33の投票結果に基づいて、瞳の輪郭を表す楕円を特定する瞳輪郭特定部34とを備える。
(もっと読む)
画像照合装置または画像照合方法
【課題】 二つの画像がSAR画像と光学画像とで異種である場合に、特徴点やエッジが明確に検出できない場合であっても画像の照合をおこなうことを目的とする。
【解決手段】 本発明によれば、異種画像と光学画像について各々フーリエ変換を行う周波数成分検出手段105a、105bと、異種画像と光学画像の各々の区間の画素列を周波数変換後の周波数成分を照合することによって異種画像と光学画像との位置あわせをおこなう位相照合手段106を備えた。
(もっと読む)
画像処理装置及び画像処理方法
【課題】精度良く線分を抽出することができる画像処理装置を提供する。
【解決手段】画像に含まれる線分を抽出する画像処理装置であって、画像の所定数の画素からなる処理単位ごとに、濃度が変化する方向である濃度変化方向を決定する濃度変化方向決定部と、濃度変化方向が反対向きの一対の処理単位を処理単位対とし、濃度変化方向と垂直な方向に連続して配置されている複数の処理単位対を含む処理単位群を線分として抽出する線分抽出部とを備える。
(もっと読む)
画像判断装置、画像処理装置、カメラ及び画像判断プログラム
【課題】学習によって判断基準を決定する画像判断装置等を提供する。
【解決手段】学習画像を記憶する第1記憶部16と、前記学習画像について、画像品質に関する指標の具体値を取得する特徴抽出部40と、前記学習画像を所定の表示条件で表示する表示部14と、前記表示部によって表示された前記学習画像に対する評価者の判断結果を取得する入力部32と、前記判断結果と前記具体値を対応させた学習要素を記憶する第2記憶部20と、前記学習要素から、前記指標に関する前記評価者の判断基準値を決定する学習演算部36と、を有する画像判断装置。
(もっと読む)
画像検出装置
【課題】円柱曲面上の対象画像を効率的に検出する画像検出装置を提供する。
【解決手段】所定の特徴領域を含む所定の平面状対象物が変形して所定の円柱状立体物の曲面上に巻き付くことにより、曲面上特徴領域を含む曲面上対象物として存在している、該曲面上対象物の情報を入力画像より検出する画像検出装置1を、入力画像より直線を検出し、該直線の2本同士で挟まれる領域として円柱状立体物を含む円柱領域候補を検出する円柱領域検出部10と、変形する前の特徴領域の外接矩形の所定の縦の長さ及び横の長さと、円柱状立体物の所定の半径と、特徴領域の所定の色情報とに基づいて、円柱領域候補の内部より曲面上特徴領域を検出する特徴領域検出部20と、抽出された曲面上特徴領域に基づいて曲面上対象物の位置情報を検出する対象物検出部30とを備えて提供する。
(もっと読む)
車線検出装置
【課題】 複合線から適切な車線を良好に検出できる車線検出装置を提供する。
【解決手段】 カメラ30は、路面画像を光の三原色R,G,Bで撮影する。画像処理ECU32(車線検出装置)は、路面画像のデータをカメラ30から取得し(S1)、路面画像40における1列の画素の集合である検査ライン42を設定する(S3)。路面画像から抽出したカラー情報から、車両前方左側において、所定の閾値以上のコントラストを示す位置が基準線46に最も近く、かつその位置で最大のコントラストを示すカラー情報を選択する(S4)。そのカラー情報に基づき、輝度値のパラメータに変換する(S5)。同様に右側についても行う(S6,7)。S5およびS7で変換した輝度値パラメータからエッジ点を抽出し(S8)、エッジ点に基づきエッジ線の抽出を行い(S11)、エッジ線から車線位置を算出する(S12)。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】スケール変化、回転変化、部分隠れがある物体に対して、物体表面の絵柄の有無にかかわらず、物体認識を可能にする
【解決手段】実施形態によれば、取得部と、第1の抽出部と、第2の抽出部と、基準データ記憶部と、認識処理部とを備える。取得部は、対象物体の画像を取得する。第1の抽出部は、対象物体の画像の輪郭線における曲率極値点を抽出する。第2の抽出部は、各々の極値点ごとに、当該極値点と当該極値点に係る曲率半径中心と輪郭線に基づく局所的な特徴ベクトルを抽出する。基準データ記憶部は、基準となる物体の画像に係る各々の極値点ごとに求められた、当該極値点に係る特徴ベクトルを少なくとも記憶する。認識処理部は、対象物体の画像に係る各々の極値点ごとに、当該極値点に係る特徴ベクトルを、基準となる物体の画像に係る特徴ベクトルと照合して、対象物体の画像に係る極値点と、基準となる物体の画像に係る極値点とを対応付ける。
(もっと読む)
弧検出装置、弧検出プログラム及び携帯端末装置
【課題】弧検出にかかる処理負荷を軽減しつつ、適切に弧を検出すること。
【解決手段】画像を入力する入力部と、画像から複数の線分を検出する線分検出部と、複数の線分のうち、2つの線分のそれぞれの位置及び基準に対する角度に基づき、2つの線分が関連付けられるかを判定する判定部と、判定部の判定結果に応じて関連付けられた2つの線分に基づき、前記複数の線分のうち、該2つの線分を含む線分で近似される弧を検出する弧検出部と、を備える。
(もっと読む)
識別装置
【課題】目標の識別精度を高くする。
【解決手段】実施形態の識別装置は、選択部、学習部、入力受付部、特徴抽出部、特徴量計算部、類似度計算部、識別部、及び出力制御部、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、画像から目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、評価基準を用いて特徴ベクトルの特徴量を計算する。類似度計算部は、特徴量と識別特徴量の類似度を計算する。識別部は、類似度を用いて目標を識別する。出力制御部は、識別結果を出力部に出力させる。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】この画像識別子抽出装置は、画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から当該次元毎に領域特徴量を算出する算出手段と、各次元が複数のタイプに類型化され、当該タイプ毎に閾値を決定する決定手段と、閾値を使用して、差分値を、画像識別子の各次元の値として量子化する量子化手段とを備える。また、ある次元に関連付けられた2つの部分領域が他の次元に関連付けられる2つの部分領域と隣接または一部重複する場合に、上記ある次元に関連付けられた2つの部分領域と上記他の次元に関連付けられる2つの部分領域との形状の組み合わせが互いに異なる。
(もっと読む)
情報処理装置、情報処理システム及び情報処理方法
【課題】距離画像のノイズに影響を受けにくく、かつ高精度なモデルフィッティングを行うことを目的とする。
【解決手段】物体の幾何的特徴を表す3次元モデルのデータを保存する3次元モデル保存部210と、物体を撮像した2次元画像を入力する2次元画像入力部220と、物体を撮像した距離画像を入力する距離画像入力部230と、2次元画像入力部220から入力された2次元画像から画像特徴を検出する画像特徴検出部250と、距離画像入力部230から入力された距離画像から画像特徴に対応する3次元座標を算出する画像特徴3次元情報算出部260と、画像特徴の3次元座標と3次元モデルとを照合するモデル照合部270とを備える。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両を撮像した画像の特徴点のオプティカルフローを利用して行う対象車両の自車両への接触の可能性の有無の判定の誤りを防止する。
【解決手段】検出部11は、自車両の車載カメラ2が対象車両を撮像して得た時系列の撮像画像から、撮像画像を構成している画素のオプティカルフローを求める。そして、このオプティカルフローの向きが、撮像画像における消失点から発散する方向に向いている画素の集合に基づき形成される検出領域を、撮像画像から検出する。方位角変化率算出部12は、前述の時系列の撮像画像に基づいて、検出領域についての撮像画像での水平線方向の端部を自車両から見たときの方位角の時間変化率を算出する。判定部13は、この方位角の時間変化率と所定の時間変化率閾値との大小比較の結果に基づいて、前述の検出領域に映っている対象車両についての自車両への接触の可能性の有無を判定する。
(もっと読む)
駐車枠検出装置及び駐車枠検出方法
【課題】駐車枠検出装置及び駐車枠検出方法において、俯瞰変換後の画像分解能に影響されずに、元の画像分解能でエッジを扱うことにある。
【解決手段】制御手段(11)は、撮像手段(9)により撮像された後方画像からエッジを抽出するエッジ抽出部(13)と、エッジ抽出部(13)によりエッジを抽出された画像を俯瞰画像に変換してこの変換時に俯瞰画像上の各エッジ点に対応するエッジ抽出画像上のエッジ点の個数を記録する俯瞰画像変換部(14)と、俯瞰画像変換部(14)により変換された俯瞰画像からρ−θ空間への投票値としてエッジ点の個数を用いてハフ変換により直線を検出する直線検出部(15)と、直線検出部(15)により検出された直線が駐車枠の線であるか否かを判定する駐車枠判定部(16)とを備える。
(もっと読む)
領域分割装置及び領域分割方法
【課題】動画像の領域分割を適切に行うこと。
【解決手段】領域分割装置は、動画像の隣接フレーム間の画素ごとの対応を推定する対応点推定手段11と、原画像から複数の解像度の画像を生成し、ノイズを付加し、類似の画素を結合し、当該画像を合成して境界候補画像を生成する境界候補画像生成手段12と、対応点の確からしさを表す信頼度関数を対応点に関するコスト関数を用いて求め、信頼度関数により算出する画素の信頼度に応じて領域分割する領域分割手段13と、境界候補画像と領域分割処理結果との差分に応じて信頼度関数を補正する対応点情報補正手段15と、前回の領域分割と、信頼度関数が補正された今回の領域分割との一致度に基づいて領域分割の適否を判定し、領域分割が適当でなければ対応点情報補正手段15と領域分割手段13による処理を繰り返し実行させ、領域分割が適当であれば領域分割処理を終了させる繰り返し条件規定手段14と、を備える。
(もっと読む)
画像処理装置
【課題】背景の影響を除去して高精度に煙状の物体を検出する。
【解決手段】ステレオカメラの撮像画像を処理する画像処理コントローラと、画像処理コントローラからの情報に基づいて物体の認識処理を行う認識処理コントローラとを基本構成とする画像処理装置において、認識処理コントローラに、煙状の物体を認識可能とするための機能として、対象物領域特定部20a,特徴量抽出部20b,煙判定部20cを備える。対象物領域特定部20aは背景の影響を除去して検出対象となる物体の領域を特定し、特徴量抽出部20bは対象物領域内で煙状の物体を認識するための画像特徴量を抽出し、煙判定部20cは抽出した画像特徴量から対象物領域内の物体が煙状の物体であるかそれ以外の物体であるかを判定する。
(もっと読む)
画像特徴量算出装置および画像特徴量算出プログラム
【課題】単一の画像から画像特徴量を容易に算出することができるとともに、エッジ間の関係を考慮することで、従来用いられていた画像特徴量よりも、文字らしさ等の判定精度が高い画像特徴量を算出することができる画像特徴量算出装置および画像特徴量算出プログラムを提供する。
【解決手段】画像特徴量算出装置1は、画像に含まれるエッジを検出するエッジ検出手段10と、エッジが検出された画素の周囲の画素におけるエッジの有無を示すエッジパターンを検出するエッジパターン検出手段20と、画像中におけるエッジパターンの出現頻度をパターンの種類ごとに集計し、集計された出現頻度に基づき画像特徴量を算出するエッジパターン集計手段30と、を備える。
(もっと読む)
21 - 40 / 245
[ Back to top ]