
Fターム[5L096GA02]の内容
Fターム[5L096GA02]の下位に属するFターム
Fターム[5L096GA02]に分類される特許
61 - 80 / 245
画像処理装置、制御方法、及びプログラム
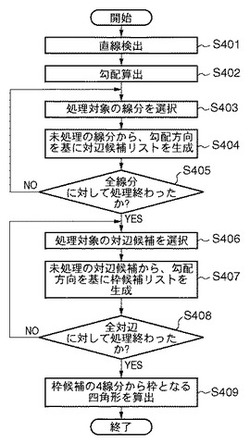
【課題】カメラなどの撮影装置で文書を撮影した場合、傾きから文書に台形状の歪みが発生する。これを補正するために文書枠を検出する必要があるが、文書領域外に直線成分が多数ある場合などには、文書枠の推定が困難である。
【解決手段】直線成分の組み合わせから文書枠候補を推定する際に、直線の直交方向への色の勾配を加味することで、余分な文書枠候補を絞り込むことを可能とする。
(もっと読む)
情報端末装置

【課題】撮像部に対して撮影対象の空間的位置や姿勢を変化させるだけで、表示部で表示する情報を確実かつ高精度に制御できるようにすること。
【解決手段】推定部12は、撮像部からの入力画像における撮影対象領域を包含する外接多角形を形成する機能と、該外接多角形の頂点を特徴点として抽出する機能と、該特徴点を、基準となる位置および姿勢での撮像対象に予め設定された基準点に対応付け、撮像対象の全体的な位置および姿勢の変化を推定する機能を有する。制御部13は、記憶部14から読み出して表示部14で表示する情報を、推定部12により推定された撮像対象の全体的な位置および姿勢の変化に応じて制御する。撮像対象は、例えば、手であり、撮像部11に対する手の位置および姿勢を変えることにより、表示部15で表示される情報を制御できる。
(もっと読む)
識別器を特定のシーン内のオブジェクトを検出するように適応させるためのシステム及び方法
【課題】汎用識別器を、特定のシーン、この識別器がトレーニングされたときには未知であるか又は利用可能でなかった特定のシーンに適応させることができるトレーニング方法を提供する。
【解決手段】汎用識別器が、特定のシーン内のオブジェクトを検出するように適応される。特定のシーンは識別器が汎用トレーニングデータを用いてトレーニングされたときに未知であった。カメラが、特定のシーンのフレームのビデオを取得する。ビデオ内のフレームを用いて特定のシーンモデルのモデルが構築される。識別器はモデルに適用され、負の例が選択される。そして、新たな負の例がトレーニングデータに付加される一方で、不確実性基準に基づいて、トレーニングデータから既存の負の例の別のセットが除去される。選択された正の例もトレーニングデータに付加され、識別器はシーン固有の識別器を得るための所望の精度レベルに達するまで再トレーニングされる。
(もっと読む)
3次元場面の分析
【課題】深さマップを処理する頑丈で効率的な方法を提供する。
【解決手段】データを処理する方法であって、ヒト類似形状を含むある場面の深さマップを受信するステップを有する。深さマップはその場面内の3次元(3D)結合構成要素を識別するために処理される。それぞれの結合構成要素は、相互に隣接し、かつ相互に次の深さ値を有する1組のピクセルからなる。別個の分離した第1と第2の結合構成要素は両方とも、ヒト類似形状に属すると識別される。そしてヒト類似形状の画像が第1と第2の結合構成要素を含んで生成される。
(もっと読む)
識別装置および識別方法
【課題】医療器材等の識別対象物体に識別マークを付することなく、その可動軸を検出することが可能な識別装置および識別方法の提供。
【解決手段】識別対象物体の画像を入力する画像入力手段10と、画像入力手段10により入力された画像からエッジを抽出するエッジ抽出手段12と、エッジ抽出手段12により抽出されたエッジから複数の直線を検出する直線検出手段13と、直線検出手段13により検出された複数の直線の交点を求めて可動軸中心点を取得する可動軸取得手段14とを含む。
(もっと読む)
テスト画像内のオブジェクトを分類するための方法
【課題】画像内のオブジェクトを検出するための方法を提供する。
【解決手段】オブジェクトを検出するための識別器が、トレーニング画像のセットから構築される。トレーニング画像毎に、トレーニング画像内のウィンドウから特徴が抽出される。該ウィンドウはオブジェクトを含む。次に、特徴の係数cをランダムにサンプリングする。係数の可能なセット毎にn連結が求められる。係数の可能な連結毎に、関係演算子を用いてブール値命題が求められ、命題空間が生成される。命題空間にブール演算子の連結関数を適用することによって識別器の複合仮説が定義され、命題空間内の全ての可能な命題が構築される。次に、テスト画像内の特徴に識別器の複合仮説を適用して、テスト画像がオブジェクトを含むか否かを検出する。
(もっと読む)
対象物検出装置、対象物検出方法、及びプログラム
【課題】画像からの対象物の検出において、画像取得時の環境の違いに起因する精度低下を抑制しつつ、処理コストを低減させる。
【解決手段】仮説生成部15は、検出対象物の画像から抽出した各検出候補に、検出候補種別テーブル13に定義されている種別を対応付けて、該画像の各検出候補についての種別の組み合わせを、仮説として複数生成する。評価部17は、所定の検出候補間条件を有している仮説に対し評価点テーブル16に設定されている評価点を与えて、仮説を評価する。検出部18は、仮説のうちの1つを評価結果に基づいて選択することで各検出候補の種別を特定し、特定された種別に基づいて検出対象物を検出する。仮説生成制御部21は、該画像の撮影時の検出対象物の周囲の環境に基づいて仮説生成部15を制御して、該環境下では生じることがないと推定される仮説の生成を制限する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び欠陥検出装置
【課題】被検査物の撮像画像から円形状の部分を高精度に検出できる画像処理装置、画像処理方法、画像処理プログラム、及び欠陥検出装置を提供すること。
【解決手段】被検査物の撮像画像から輝度の変化点を検出して円外周点候補を検出する円外周点検出手段71と、円外周点候補リスト92を生成する円外周点候補リスト生成手段72と、円外周点候補組合せリスト93を生成する円外周点候補組合せリスト生成手段73と、円中心点候補リスト94を生成する円中心点候補リスト生成手段74と、円中心点候補リスト94のうち有力円中心点候補を選択する有力円中心点候補選択手段75と、有力円中心点候補から各円外周点候補までの距離が所定範囲内の円外周点候補を抽出する正常円外周点抽出手段76と、被検査物の円中心点、及び当該円中心点の半径を求めて、撮像画像90の円を検出する円検出手段77とを備える。
(もっと読む)
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照用画像データの作成に適した画像処理システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出する特徴点抽出部と、画像特徴点に割り当てられた重み係数に基づいて画像特徴点から撮影画像毎の画像特徴点データを生成する画像特徴点データ生成部と、撮影画像中における画像特徴点データの分布状態に応じて画像特徴点に与えられる重み係数を調整する調整係数を設定する調整係数設定部と、画像特徴点データを画像特徴点データに対応する撮影画像の撮影位置を含む撮影属性情報と関係付けて、風景画像認識のために利用される参照データとしてデータベース化する参照データデータベース化部とを備えた画像処理システム。
(もっと読む)
検知装置
【課題】車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
(もっと読む)
車載白線認識装置
【課題】横断歩道や複合線が存在しても、白線を正しく認識できる車載白線認識装置を提供すること。
【解決手段】車両周囲の画像を取得する車載カメラ10と、車載カメラ10で取得した画像から画像処理により白線候補を抽出する白線候補抽出手段30と、白線候補の白線らしさの確信度を算出する確信度算出手段40と、確信度算出手段40が算出した確信度に基づき、認識する白線を選択する白線選択手段50、60と、車載カメラ10で取得した画像から画像処理により複合線を検出する複合線検出手段40と、車載カメラ10で取得した画像のうち、複合線検出手段40により検出した複合線を除外した領域において、画像処理により横断歩道を検出する横断歩道検出手段120とを備え、確信度算出手段40は、白線候補が横断歩道検出手段120により検出した横断歩道に属する場合、それ以外の場合よりも、その白線候補の確信度を低くすることを特徴とする車載白線認識装置1。
(もっと読む)
画像処理装置、撮像装置、及びプログラム
【課題】画像の画像特徴量を加工する場合、奥行距離に基づいて画像の画像特徴量に対する加工強度を変更しても、画像が不自然にならないようにすることができる画像処理装置、撮像装置、及びプログラムを提供する。
【解決手段】画像処理装置140が、画像が入力される画像取得部141と、画像取得部141に入力された画像に対応する領域毎の奥行距離が入力される距離取得部142と、画像に対応する領域毎の画像特徴量が入力される特徴量取得部143と、画像特徴量に基づいて、画像特徴量に対する加工強度を奥行距離毎に定める加工強度設定部144と、加工強度に基づいて、画像の画像特徴量を、領域毎に画像処理する画像処理部145と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】画像から特定形状を高速に検出することができる画像処理装置を開示する。
【解決手段】この画像処理装置において、候補位置算出部(106)は、与えられた画像から、検出対象の形状に含まれる3辺に3点で接する第一の円の中心点の第一の候補位置を求める。角度算出部(106)は、前記3辺から前記第一の候補位置への法線と、前記法線と各辺が交わる点を通る一定方向の基準線との角度を求める。相対関係算出部(106)は、前記第一の候補位置に関する前記角度の相対関係を求める。認識部(108)は、前記角度の相対関係と、予め格納された形状の角度の相対関係とから、前記与えられた画像に含まれる形状を認識する。
(もっと読む)
白線認識装置
【課題】白線を正しく認識できる白線認識装置1を提供すること。
【解決手段】自車両の前方の道路を含む領域の画像を撮影する撮影手段3と、前記画像における道路の領域の輝度を検出する輝度検出手段7と、前記輝度検出手段7で検出した輝度と閾値との対比結果に基づき、前記画像における道路の白線を認識する白線認識手段7と、前記白線認識手段7により認識された白線内における輝度に基づき、前記閾値を再設定する閾値再設定手段7と、を備えることを特徴とする白線認識装置1。
(もっと読む)
画像処理装置及びプログラム
【課題】簡易な計算で、エッジデータのフィルタリング、補完、及び特徴抽出を行う。
【解決手段】エッジデータの各点に対して計算窓を設定し、エッジデータで表されたエッジを近似するNc次の関数の基底関数を表す行列B、及び計算窓内のエッジデータに対する重み行列Wで表され、かつNc次の関数の次数と同数の行数及び窓内の点の個数と同数の列数で表される行列Mを設定する。エッジデータの点毎に、行列Mの各行の要素と計算窓内の列で表されたエッジデータとの内積の各々を計算し、行列Mの1行目との窓内の列で表されたエッジデータとの内積をフィルタリング後のエッジデータとして、及び行列Mの(n+1)行目と窓内の列で表されたエッジデータとの内積をフィルタリング後のエッジデータのn次微分として出力する。また、フィルタリング後のエッジデータのn次微分を用いてエッジの特徴を抽出する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】 入力画像から抽出された特徴ベクトルを複数のクラスタに分類し,その分類結果を基に入力画像の識別を行う手法では,特徴ベクトルの分類手法が識別性能に大きく影響するが、複雑な分類手法を用いると計算量が増大し,実時間での識別が困難となる。
【解決手段】 あらかじめ分類結果を記憶しておき、識別時には記憶した分類結果を基に高速に分類を行う。事前の分類では、分類を2段階に分けて行う。第一の分類は高速に実行可能な手法を用い、分類結果から複数の代表ベクトルを生成する。そして第二の分類では、作成した代表ベクトルに対して分類を行い,その結果をルックアップテーブルに記憶する。識別対象画像が入力されたときにはこのルックアップテーブルを利用することで、高速に分類結果を反映することができる。
(もっと読む)
照合装置、照合方法及びコンピュータプログラム
【課題】計算コストを抑えつつ、照合の精度を向上させること。
【解決手段】照合装置であって、入力された図形の模様についてエッジを抽出するエッジ抽出部と、入力された図形の模様に対し、所定の中心点における複数の回転角毎に、各回転角の角度方向に伸びる探索直線とエッジとの交点に関する特徴量を第一特徴量として抽出する第一特徴量抽出部と、入力された図形の模様に対し、所定の中心点における複数の回転角毎に、各回転角の角度方向に伸びる探索直線とエッジとの交点に関する特徴量を、第一特徴量抽出部とは異なる基準で第二特徴量として抽出する第二特徴量抽出部と、第一特徴量及び第二特徴量に基づいて、入力された図形の模様について照合を行う照合部と、を備える。
(もっと読む)
検出装置、検出方法、検出プログラム、および記録媒体
【課題】デジタル画像中のコンテンツの境界を自動的に、且つ、より正確に検出することが可能な検出装置を実現する。
【解決手段】コンテンツ境界検出システム2は、画像を正規化することにより正規化画像を生成する画像前調整部8と、正規化画像中のコンテンツについて複数のエッジ点を検出するエッジ検出部10と、正規化画像におけるコンテンツの傾き角度の方向の投影ヒストグラムであって、エッジ検出部10により検出された複数のエッジ点についての投影ヒストグラムを作成する投影ヒストグラム作成部12と、投影ヒストグラムおよび傾き角度から、上記境界の一部を検出する境界推定部14と、を備えている。エッジ検出部10は、正規化画像中の各画素について、画素を中心とする5x5の範囲の画素群の最大濃度値と最小濃度値との濃度差が7以上30以下である場合に該画素をエッジ点として検出する。
(もっと読む)
情報処理装置、情報処理システム、情報処理方法、情報処理プログラム及びコンピュータ読み取り可能な記録媒体
【課題】様々な共有ボードに適用でき、共有ボードの機能を拡張することができる情報処理装置を提供する。
【解決手段】演算装置600は、撮影手段により今回撮影された共有ボードの書き込み面の画像である現行画像が、前回撮影手段により撮影された共有ボードの書き込み面の画像である基準画像から変更された内容である、変更情報を検知する変更検知部606と、共有ボードの書き込み面の画像に対する処理と対応づけられた情報を意味付情報として記憶する記憶手段と、上記検知された変更情報が、意味付情報に相当するか否かを判定する意味付情報検知部608と、上記変更情報が上記意味付情報に相当すると判定されると、当該意味付情報に対応付けられた処理を開始する意味解釈部612とを備えている。
(もっと読む)
61 - 80 / 245
[ Back to top ]