
Fターム[5L096GA02]の内容
Fターム[5L096GA02]の下位に属するFターム
Fターム[5L096GA02]に分類される特許
81 - 100 / 245
移動体追跡装置、追跡方法及びコンピュータプログラム
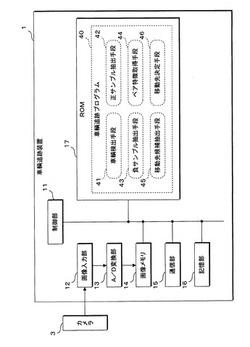
【課題】撮像画像に日照変化、日向及び日陰の領域の混在、低コントラスト、並びに移動体の部分的な重なり等が生じた場合であっても、多大な計算を必要とせずに、移動体の移動先を精度よく追跡することができる移動体追跡装置、追跡方法及びコンピュータプログラムを提供する。
【解決手段】車輌追跡装置1は、t番目の画像から車輌を含む正サンプルを抽出して、この正サンプルから複数の画素ペアを抽出すると共に、正サンプルの周囲から複数の負サンプルを抽出して、各負サンプルから複数の画素ペアをそれぞれ抽出し、画素ペアの輝度値の大小関係に基づいて正サンプルと負サンプルとの判別精度が高い画素ペアをペア特徴として取得する。次いで、t+1番目の画像から複数の画像領域を移動先候補として抽出し、移動先候補から抽出した画素ペアの大小関係が正サンプルのペア特徴に最も類似する移動先候補を移動体の移動先に決定する。
(もっと読む)
車線境界全般を検出する方法およびシステム

【課題】 車線区分線や道路境界などの路面標識が連続的でない場合、湾曲している場合、そのサイズが既知でない場合などにおいても、極端に大きな計算能力を必要とすることなく、効率的に路面標識を検出する方法、装置およびシステムを提供する。
【解決手段】 イメージャ(1)から、車両(2)の前方の道路(4)の画像(3)を受けるステップと、画像中に識別された道路内に、関心領域を決定するステップと、関心領域内に車線区分線(7L、7R)を検出することによって、また車線区分線を検出することができなかった場合には、関心領域内に道路境界を検出することによって、路面標識(8L、8R)を検出するステップとを含んでいる。ウィンカがオンの場合には、前記各ステップをスキップする。
(もっと読む)
エッジ検出方法及び画像処理装置
【課題】被撮像物の材質あるいは背景や周辺環境、さらには、光源の照明方向や明るさに左右されることなく被撮像物のエッジ位置を正確に検出する。
【解決手段】被撮像物IOのエッジを検出するために、制御部3は、被撮像物を実質的に半円形状で囲むように複数設けられた光源LEDを予め定められた順番で1つずつ点灯させることで、その点灯タイミングに同期して被撮像物を定点からカメラ2で撮像して当該被撮像物の濃淡画像を連続的に取得する。演算処理部4は、この点灯タイミングに同期して連続的に取得したすべての濃淡画像で、画素列毎に各画素の階調を比較して、階調の最大値となる画素と最小値となる画素との差分値を微分処理して画素列毎に微分値分布を算出し、この微分値分布から予め定められた閾値以上の画素位置をエッジ点として検出する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】他の領域と特徴の似ている画像領域であっても、当該画像領域における正しいオブジェクトの識別を行えるようにする。
【解決手段】特徴量算出部113では、画像分割部112で分割された画像の各領域から特徴量を算出し、対応付け手段(114及び115)では、当該特徴量に基づいて各領域に1又は複数のオブジェクトを対応付ける。そして、オブジェクト選択部116では、対応付け手段により1つの領域に対して複数のオブジェクトが対応付けられた場合、当該1つの領域に対応付けられた各オブジェクトへの帰属確率と、当該1つの領域の近傍に位置する近傍領域に係る近傍領域情報とに基づいて、複数のオブジェクトの中から1つのオブジェクトを選択して当該1つの領域に対応付ける。そして、領域統合部117では、画像において同じ種類のオブジェクトが対応付けられた領域を統合する。
(もっと読む)
ボールグリッドアレイデバイスの位置合わせ及び検査のためのシステム及び方法
不均一な特徴部を有するBGAデバイスなどの部品の高速位置合わせ及び検査のためのシステム及び方法を提供する。機械視覚システムのトレーニングタイム中に、粒度を選別するための幾何学解析の量及び位置合わせ有意ブロブの小さなサブセットが決定される。さらにトレーニングタイム中にボールがグループに関連付けられ、各グループは独自の検査用パラメータセットを有する。 (もっと読む)
デジタル画像の美的品質の推定方法
デジタル画像プロセッサが、入力されてくるデジタル画像を自動的に分析することにより、デジタル画像と関連付けられる1又は複数の消失点を決定する工程と、消失点の位置からコンポジショナルモデルを計算する工程と、コンポジショナルモデルに応じて、デジタル画像の美的品質の推定値である美的品質パラメータを生成する工程と、を実行することを特徴とするデジタル画像の美的品質の推定方法。  (もっと読む)
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】過度な処理負担を与えることなく画像に表示される物体を認識することができる装置及び方法等を提供する。
【解決手段】制御部2は、画素データに座標値を付与し、対応する輝度情報を抽出し、輝度勾配を算出し、画像を構成する画素データの輝度勾配が予め設定された閾値以下である場合に、前記画素データに対して、予め設定された方向フィルタを用いてフィルタリング処理を施すことにより、過度な処理負担無く、追跡を行う。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】輪郭が滑らかな曲線と細かな凹凸を含む曲線とから構成されているような場合でも、正確に輪郭を抽出する。
【解決手段】輪郭抽出の際に、小領域から構成される基準領域を、対象物体の適切な範囲における輪郭の大域的な形状に応じて設定する。これにより輪郭候補点の探索範囲、および輪郭候補点が輪郭かどうかを判別する際に用いる画像特徴を適切に設定し、画像中の輪郭の大域的な形状に基づいて設定された複数の小領域から構成される基準領域内の画像特徴量を用い、輪郭近傍の画素のグループ化を行い、輪郭周辺の画素を輪郭の形状によらずに安定的に抽出する。
(もっと読む)
車線認識装置、及び車線認識方法
【課題】走行車線の認識結果を取扱う制御系の信頼性を向上させる。
【解決手段】先ずレーンマーカの候補点が、明らかに誤検出であるか否かを判断し、候補点の誤検出が明らかであれば(ステップS104の判定が“Yes”)、道路モデルを初期化するリセット処理を行う(ステップS105)。一方、候補点の誤検出が不明であれば(ステップS104の判定が“No”)、候補点の検出結果に連続性があるか否かを判断し、候補点の検出結果に連続性がないと判断したら(ステップS106、S109、S110の何れかの判定が“Yes”)、一時的に外乱の影響を受けている可能性があるので、道路モデルの更新を中止する、つまり道路パラメータの今回値を削除し、前回値を保持するロスト処理を行う(ステップS107)。
(もっと読む)
カメラを基にしたオブジェクトの分析のためのシステム、方法及びプログラム製品
【課題】オブジェクト認識、オブジェクト検出及び/又はオブジェクト分類を含むカメラを基にしたオブジェクトの分析のためのシステム、方法及びプログラム製品を提供する。
【解決手段】カメラ・システムから得られた画像中のオブジェクトを分析するための模範的な実施形態のコンピュータ化方法では、カメラ・システムから複数の画素を持つ画像を受け取り、各画素のために一群の特徴を計算し、前記一群の特徴及び前記画像の幾何学的中心から一群の特徴の半径方向モーメントを導出するか、又は前記一群の特徴から一群の特徴の中心モーメントを導出し、前記画像の面積と前記導出された一群の特徴のモーメントのいずれかとに基づいて正規化記述子を計算し、正規化記述子に基づいて、コンピュータにより、前記画像中の少なくとも1つのオブジェクトを認識し、検出し及び/又は分類する。
(もっと読む)
画像判定装置、画像判定プログラムおよび画像判定方法
【課題】画像のシーンを判定する処理を短縮化すること。
【解決手段】画像処理装置100は、シーン判定部120が、入力された画像に基づいて所定の角度で相互に連結する複数の線分を検出し、検出した各線分を同一のグループに登録する。そして、シーン判定部120は、同一のグループに含まれる各線分の大きさが閾値以上の場合に、画像のシーンが街中であると判定する。シーン判定部120は、各線分の大きさが閾値未満の場合に、画像のシーンが街中以外であると判定する。
(もっと読む)
画像を用いた移動物体検知装置
【課題】画像を拡大中にも画像内での移動物体の存否を検出し、画像の拡大中にも画像内での移動物体の有無を確認できるようにした画像を用いた移動物体検知装置を提供する。
【解決手段】撮像手段10は、対象空間を時間経過に伴って連続的に撮像する。撮像手段10により撮像された画像からエッジ画像が生成され、エッジ画像はエッジ画像記憶部13に格納される。論理演算部14aおよび移動判定部15aは、エッジ画像を3枚ずつ用いてシルエットマッチングを行い画像の中で移動領域を抽出する。移動領域が抽出されると、拡大画像生成部16において移動領域を含む部分領域を1画面の大きさに拡大した拡大画像を生成する。論理演算部14bおよび移動判定部15bは、少なくとも3枚の拡大画像が得られるまでの期間は、時系列において隣接する2枚ずつの拡大画像の差分画像により移動領域の存否を検出する。
(もっと読む)
画像処理方法および装置並びにプログラム
【課題】被写界深度の浅い画像に対するボケ補正を効率良く行う。
【解決手段】顔抽出手段100は、画像Dを縮小して得た縮小画像dから顔画像d0を抽出する。解析手段20は、顔画像d0および画像Dにおいて顔画像d0の部分に対応する部分の画像を用いて画像Dのボケ方向およびボケ度を算出し、画像Dがボケ画像であるか通常画像であるかを判別する。ボケ画像として判別された画像Dに対して、ぶれ度、ボケ幅をさらに算出する。パラメータ設定手段30は、ボケ幅に応じて1次元補正マスクと2次元補正マスクを設定し、さらにボケ度に応じて補正強度を設定すると共に、ぶれ度に応じて1次元補正マスクと2次元補正マスクの比率を調整する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】画像の撮れ具合をより適切に評価できるようにする。
【解決手段】ぼけ度スコア算出部23乃至彩度スコア算出部27は、入力画像から予め定められた特徴の特徴量を抽出し、その特徴に基づく、入力画像に対する評価を示す特徴別のスコアを算出する。例えば、輝度スコア算出部24は、特徴量として、入力画像から輝度値を抽出し、入力画像の被写体部分における、輝度値の分布に基づく評価を示す輝度スコアを算出する。総合スコア算出部28は、各特徴別のスコアから、入力画像の撮れ具合の評価を示す総合スコアを算出する。このように、各特徴別のスコアの算出時に、その特徴に適した入力画像の領域から、各特徴量を抽出してスコアを求めることで、より適切に入力画像を評価できるようになる。本発明は、画像処理装置に適用することができる。
(もっと読む)
無作為多項ロジットを用いる意味場面区画
【課題】画像レベルの特徴及び統計データが不充分である画像中にある、特に小さいサイズの被写体を検出し、その位置を決定する。
【解決手段】無作為多項ロジット(RML)分類装置を使用し、場面区画に当該装置を適用するシステム及び方法が開示される。システムは、画像テクストン化モジュール、特徴選択モジュール及びRML分類装置を含む。画像テクストン化モジュールは、画像の被写体が事前にラベル付けされている訓練画像集合を受け取り、訓練画像集合から対応するテクストン画像を生成する。特徴選択モジュールは、テクストン画像から1又は複数のテクスチャレイアウト特徴を無作為に選択する。RML分類装置は、複数の多項ロジスティック回帰モデルを有し、選択されたテクスチャレイアウト特徴を使用して多項ロジスティック回帰モデルのそれぞれを学習し、学習済のモデルを、入力画像に対して適用し場面を区画する。
(もっと読む)
画像検索装置及びその制御方法並びにプログラム
【課題】 画像全体の特徴を用いた検索方式(全体特徴方式)では画像の回転や切り取りに対応できない。一方、局所特徴を用いた検索方式(局所特徴方式)では、抽出された局所特徴点数が少ない場合又は多すぎる場合に検索精度が低下する場合がある。
【解決手段】 全体特徴方式と局所特徴方式とが相互補完可能となるように構成する。すなわち,従来技術の局所特徴方式を使って検索結果候補を得た後,当該検索結果候補画像について,すでにデータベースに登録されている全体特徴をさらに照合する。なお,当該全体特徴の照合位置は,局所特徴を使って推定する。
(もっと読む)
画像マッチング装置、およびカメラ
【課題】精度高くテンプレートマッチングを行うこと。
【解決手段】制御装置104は、テンプレート画像とターゲット画像のそれぞれを複数のブロック(分割領域)に分割し、各ブロックごとにY成分の値の平均値とCb成分の値の平均値と、Cr成分の値の平均値を算出する。そして、制御装置104は、テンプレート画像とターゲット画像との各成分の類似度値を算出し、各成分の類似度値に無彩色度βに基づく重みを掛けて、テンプレート画像とターゲット画像との類似度値を算出する。
(もっと読む)
画像認識装置、及びプログラム
【課題】 紙文書をスキャンして得られたカラーおよびグレー階調の文書画像から、高速に紙面領域を検出する処理を提供する。
【解決手段】 紙文書をカラーまたはグレー階調でスキャンした画像について、紙面の縁付近に暗色がデザインされたケースにおいても、画像濃度の分布解析によって背景色と前景色の境界閾値を計算して紙面領域の概形を計算し、更に、求めた紙面領域の境界辺付近において、各辺に垂直な方向に二分探索を行うことで画像エッジを高速に抽出して、4辺を構成する直線を詳細に計算することで、高解像度のカラー及びグレー階調画像に対して計算量の少ない4辺検出を実現する。
(もっと読む)
移動物体追跡装置、移動物体追跡方法および移動物体追跡プログラム
【課題】背景が変動する画像からでも、画像中の移動物体を正確に検出することができる移動物体追跡装置を提供する。
【解決手段】移動物体追跡装置が、時系列画像を画像処理して画像中の移動物体を検出する画像上移動物体追跡装置であって、時系列画像の各画像が複数のブロックに分割され、当該画像中の移動物体を示す識別符号が移動物体に対応するブロックに付けられて記憶されているオブジェクトマップ記憶部と、時系列画像の画像から移動物体の輪郭を抽出する輪郭抽出部と、輪郭抽出部が抽出した輪郭に基づいて、オブジェクトマップ記憶部に記憶されているブロックの識別符号を補正する補正部と、を有する。
(もっと読む)
物体識別装置
【課題】対象物の識別精度を高めることができる物体識別装置を提供する。
【解決手段】物体識別装置1は、検出された被検出物体について歩行者の歩行動作に関連する所定の指標値を抽出し、抽出された被検出物体の指標値と所定の基準値との比較に基づいて歩行者を識別する物体識別装置であって、所定の基準値は、歩行者における特定の部位の他の部位に対する相対的な状態変化に関する特徴を示すことを特徴とする。
(もっと読む)
81 - 100 / 245
[ Back to top ]