
国際特許分類[A01B33/08]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 駆動回転具を有する耕うん用作業機 (988) | 器具;細部,例.変速機構または伝動機構 (697)
国際特許分類[A01B33/08]の下位に属する分類
器具の構造的または機能的特徴 (53)
器具の組み合わせ;器具のカバー (222)
器具の回転軸への取り付け,例.弾性的に取りつけられた器具 (24)
国際特許分類[A01B33/08]に分類される特許
11 - 20 / 398
電動作業機製造方法
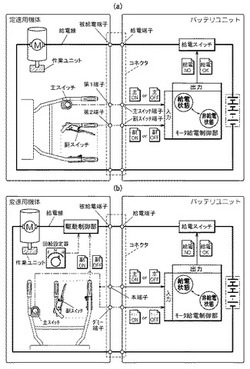
【課題】着脱式バッテリユニットを備えた定速タイプの歩行型作業機と変速タイプの歩行型作業機の両方を効果的に製造する方法を提供する。
【解決手段】モータ給電制御部とバッテリ側コネクタ部を備えたバッテリユニットと、定速電動モータと、主スイッチ及び副スイッチと、バッテリ側コネクタ部と接続可能な機体側コネクタ部とを備えた定速用機体と、変速電動モータと、主スイッチ及び副スイッチ及びモータ速度設定器と、バッテリ側コネクタ部と接続可能な機体側コネクタ部とを備えた変速用機体とを組み合わせて定速電動作業機及び変速電動作業機を製造する電動作業機製造方法。バッテリユニットは、給電端子と主スイッチ端子と副スイッチ端子とが、定速用機体との接続時には、定速用機体の被給電端子と第1端子と第2端子とに装着され、変速用機体との接続時には、変速用機体の被給電端子と本端子とダミー端子とに装着される。
(もっと読む)
歩行型電動作業機

【課題】操作レバーの把持操作において操作レバーの内面側に入り込む侵入物の影響を極力受け難い歩行型電動作業機を提供する。
【解決手段】操作レバー40を操縦ハンドル6の横軸芯41周りに揺動自在に支持し、操作レバー40は上面が開口する断面が箱形形状42の部分を備え、箱形形状の部分42の底面42a,42aは左右両側から左右中央側にかけて下方に傾斜する形状であって、箱形形状の部分42の底面42a,42aから上方に離間した位置に操作レバー40が把持位置に位置することを検出する位置センサ44を、箱形形状の部分42の底面42a,42aにおける左右いずれかの縦壁42b寄りに配置し、位置センサ44が操作レバー40の底面42aに接触することにより操作レバー40が把持位置に位置することが検出されると電動モータの駆動を許容する制御手段を備えてある。
(もっと読む)
歩行型電動作業機
【課題】操作性のよい操作レバーのロック及び解除部材を備えた歩行型電動作業機を提供する。
【解決手段】操作レバー40を操縦ハンドル6の第1横軸芯41周りに上下揺動自在に支持し、操作レバー40が把持位置cに位置することを検出する位置センサを備え、位置センサにより操作レバー40が把持位置cに位置することが検出されると電動モータの駆動を許容する制御手段を備え、操作レバー40の把持位置cへの操作を阻止可能な牽制部材50を、操作レバー40の把持位置cへの操作を阻止する位置及び操作レバーの把持位置cへの操作を許容する位置に亘って、第2横軸芯51周りに操縦ハンドル6の持ち手部6Cの近傍または操作レバー40に上下揺動自在に備えてある。
(もっと読む)
電動作業機
【課題】バッテリユニットの機体への安全で確実な装着と取り外しが可能な電動作業機を提供することである。
【解決手段】電動モータを支持する機体と、機体に離脱可能に装着されるとともに電動モータに給電線を介して給電するバッテリユニットと、当該バッテリユニット内の給電線に設けられた給電スイッチと、信号線を介して得られる操作スイッチのスイッチ状態に基づいて給電スイッチの開閉を制御するモータ給電制御部と、バッテリユニット側の信号線及び給電線と機体側の信号線及び給電線とを接続する端子群を有するコネクタユニット9とを備え、バッテリユニットの装着時には給電線の端子が信号線の端子より先に接続し、バッテリユニットの離脱時には給電線の端子が信号線の端子より後から接続解除する。
(もっと読む)
電動作業機用制御装置及び電動作業機
【課題】明確な操作手順によってのみ電動モータが駆動する電動作業機用制御技術とその技術を採用した電動作業機を提供する。
【解決手段】作業ユニットに動力を伝達する電動モータに給電線を介して給電するバッテリユニットと、給電線に設けられた給電スイッチと、給電スイッチを制御するモータ給電制御部とが備えられている。モータ給電制御部は、主スイッチがOFF状態における副スイッチからのON状態信号に基づいて電動モータに対する始動制御を保留する無視状態を設定し、当該無視状態を副スイッチからのOFF状態信号によって解除する優先信号評価部を有し、無視状態の非設定時において主スイッチと副スイッチの両者のON状態が確認された場合に、給電スイッチを閉鎖して電動モータへの給電を可能にする制御信号を給電スイッチに出力する。
(もっと読む)
歩行型電動作業機
【課題】作業部が駆動中においても操作が容易な変速レバーを備えた歩行型電動作業機を提供する。
【解決手段】作業部と、作業部を駆動する電動モータと、電動モータに給電するバッテリと、左右の操縦ハンドルと、を備えた歩行型電動作業機において、左右の操縦ハンドル7の一方に、把持すると電動モータの駆動を許容し、離すと電動モータの駆動を阻止する操作レバーを設けるとともに、左右の操縦ハンドル7の他方に、電動モータの駆動を無段階に変速可能な変速レバー60を設け、変速レバー60が、上下方向の軸芯61周りに回動し、作業部を前進駆動させる前進領域Fと、作業部を後進駆動させる後進領域Rと、前進領域Fと後進領域Rとを接続する中立領域Nとの間で移動可能に構成された。
(もっと読む)
電動作業機
【課題】着脱可能なバッテリユニットを備えた可変速度型の電動作業機における無駄のない電子制御系の構成を提供する。
【解決手段】作業ユニットに動力を伝達する電動モータと、操縦部に設けられた主スイッチ及び電動モータの速度設定器と、機体に設けられた駆動制御部と、駆動制御部に給電する機体に対して着脱可能なバッテリユニットと、バッテリユニット側の給電線に設けられた給電スイッチと、バッテリユニットに設けられるとともに給電スイッチの開閉を制御する制御信号を前記給電スイッチに出力するモータ給電制御部とが備えられている。モータ給電制御部は信号線を通じて送られてくる主スイッチのスイッチ状態に基づいて制御信号を生成し、かつ駆動制御部は速度設定器からの速度設定信号に基づいて駆動電力を調整する。
(もっと読む)
電動作業機
【課題】着脱式バッテリユニットから電動モータへの給電を制御する電子制御系をより簡単にした電動作業機を提供する。
【解決手段】操縦部に設けられた主スイッチ及び副スイッチと、作業ユニットに動力を伝達する電動モータに給電線を介して給電する着脱可能な充電式バッテリユニットと、給電線のバッテリユニット側に設けられた給電スイッチと、バッテリユニット内に組み込まれたモータ給電制御部とが備えられている。モータ給電制御部は主スイッチ及び副スイッチから信号線を介して直接入力されるスイッチ状態信号に基づいて給電スイッチの開閉を制御する制御信号を生成して、給電スイッチに出力する。
(もっと読む)
歩行型管理機
【課題】簡易な畝立て器を、容易に取付け、取外し可能に、かつ既存の製品にも所有者に負担をかけることなく装備可能な歩行型管理機を提供する。
【解決手段】抵抗棒12に取付け部15を設け、該取付け部15に、耕起ロータ10にて耕起された土を畝立てする畝立て器16を取付けるにあたり、前記畝立て器16は、前記取付け部15に、該畝立て器16の成形板16aが前記抵抗棒12の前側にて回動自在となる使用位置と、前記成形板16aが前記抵抗棒12の後側の不使用位置とに姿勢変更可能に取付けると共に、該成形板16aが不使用位置にあっては、耕耘した土塊が飛散しないハンドル5と略平行に向く位置で下方への回動が規制される位置とした。
(もっと読む)
耕耘爪
【課題】耕耘爪軸の逆回転による弾性体カバーの土除去作業を長期的に行うことが可能となる耕耘爪を提供する。
【解決手段】耕耘爪101は、縦刃部から横刃部にかけた回転方向と逆向きの湾曲の度合いを高くすることで、耕耘爪101の爪先である頂部Xと耕耘爪軸Oとの距離が近くなるように設計してある。この結果、耕耘爪101の爪先である頂部Xと耕耘爪軸Oとの距離が近くなっており、度重なる耕耘作業を行った場合でも、爪先における摩耗の影響が低減されるようになることから、頭縁部160における曲線形状の部分を多く残す(維持する)ことが可能となる。このため、度重なる耕耘作業に伴い、耕耘爪101の摩耗が進行した状況であっても、耕耘爪軸の逆回転による弾性体カバーの土除去作業を長期的に行うことが可能となる。
(もっと読む)
11 - 20 / 398
[ Back to top ]