
国際特許分類[A01B33/08]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 駆動回転具を有する耕うん用作業機 (988) | 器具;細部,例.変速機構または伝動機構 (697)
国際特許分類[A01B33/08]の下位に属する分類
器具の構造的または機能的特徴 (53)
器具の組み合わせ;器具のカバー (222)
器具の回転軸への取り付け,例.弾性的に取りつけられた器具 (24)
国際特許分類[A01B33/08]に分類される特許
31 - 40 / 398
歩行型作業機
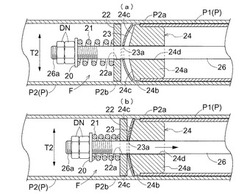
【課題】操縦ハンドルの伸縮操作をより簡便に実施できるようにすること。
【解決手段】操縦ハンドルが、操作部側の第1パイプ部材P1と、第1パイプ部材P1を長手方向に移動自在に支持するように第1パイプ部材P1を挿通する作業機本体側の第2パイプ部材P2とを備え、第1パイプ部材P1を第2パイプ部材P2に固定及び固定解除自在な固定部材23を第2パイプ部材P2の内部に備え、操作部の操作を固定部材23に伝える連係部材26を第1パイプ部材P1の内部に備えて構成してある。
(もっと読む)
歩行型農作業機

【課題】エンジン停止時の押し荷重を軽減した手押し走行を行うと共に、路上走行を高速走行により能率よく行うことができる歩行型農作業機を提供する。
【解決手段】車軸のみを駆動する経路と、車軸及び耕耘軸を駆動する経路と、耕耘軸のみを駆動する経路と、車軸及び耕耘軸のどちらも駆動しないニュートラル状態とに切換える動力伝動装置を備えた歩行型農作業機であって、前記動力伝動装置は、車軸への伝動経路上で、かつ伝動軸5よりも伝動経路下流側に配置された中間軸38と、該中間軸38に遊転自在に嵌挿されて端部に中間ギヤ41aを有するスリーブ41と、該スリーブ41に軸方向に摺動可能に嵌挿された1速ギヤ41bと2速ギヤ41cとを備え、該1速ギヤ41bと2速ギヤ41cとを移動させることで車軸への伝動経路の断接を切換えるように構成した。
(もっと読む)
ロータリー作業機
【課題】爪軸の長手方向にわたって残耕を生じないロータリー作業機を提供する。
【解決手段】偏芯耕耘爪Eを爪軸AXの長手方向P−Pの中央から両端に向かってそれぞれ距離Lだけ離れた位置に1つずつ配置し、偏芯耕耘爪Eに隣接する普通耕耘爪45の直刃部45Bが偏芯耕耘爪Eの先端Etの回転軌跡と爪軸AXの半径を含む仮想面に接するように構成する。
(もっと読む)
抵抗棒と補助輪の切替装置及びそれを備えた歩行型作業機
【課題】作業機のダッシングを防止する抵抗棒及び作業機の移動走行時の走行を安定させる走行用補助輪を備えた農業用の歩行型作業機において、操作者が作業機を操作するハンドル側で抵抗棒又は走行用補助輪のいずれかが働くように切り替えることができるようにした歩行型作業機を提供する。
【解決手段】歩行型作業機は、抵抗棒43及び走行用補助輪42を備え、抵抗棒43及び走行用補助輪42は択一的に使用され、作業機を操作するハンドル5側に抵抗棒43及び走行補助輪42を有し、抵抗棒43及び走行補助輪42は、何れか一方が使用位置にあるときは他方は不使用位置にある構成を有し、一方が位置を移動するときは他方も位置を移動するよう連結されており、抵抗棒43又は走行補助輪42の何れか一方の使用の選択が他方の不使用の選択となるようにしている。
(もっと読む)
ロータリ耕耘装置
【課題】平板と、当該平板の下辺部の横方向中央部の移動を規制する規制部材との連結が解除され難いロータリ耕耘装置を提供すること。
【解決手段】可撓性を有し、且つその上端部がロータリ耕耘装置のカバー11の後端部に上下に揺動可能に連結されている平板18と、地面に接地してロータリ耕耘装置の地面に対する高さを設定する高さ設定部材12と、平板18の横方向中央部を上下方向全体に亘って支持可能でカバー11に上下揺動自在に支持される支持部材27と、支持部材27と高さ設定部材12とを解除自在に連結する連結手段34とを備える。
(もっと読む)
歩行型作業機
【課題】バッテリーの取り扱いを容易にする歩行型作業機を構成する。
【解決手段】エンジンを備えた機体から後方に左右のハンドル杆6が延設され、一方のハンドル杆6に操作レバーを有する作業操作部を備え、他方のハンドル杆6にはスタータモータに電力を供給するバッテリー7を有する電源部Eを備えた。電源部Eは、バッテリー7を嵌め込まれるケース41と、このケース41の上方を覆うバッテリーカバー42とを有し、バッテリーカバー42をケース41の後端から後方に張り出したオーバーハング部Xからハーネス46を後方に引き出し、このハーネス46をケース41の下方からハンドル杆6に沿って配置した。
(もっと読む)
ロータリ耕耘機
【課題】 構成部材が少なく構造が簡単で製造費が安上がりになり、しかも支持フレームの高さ設定を容易にすることができるロータリ耕耘機を提供する。
【解決手段】 支持フレーム9には、左右一対の揺動アーム81と、接地部材7,8を支持するツールバー83とが備えられ、一方の揺動アーム81に支持フレーム9の揺動高さを示す目盛り96が前後方向に設けられ、枢支軸84の上方位置の機枠4に連動杆98の前上側が左右方向の支軸99廻りに上下揺動自在に支持され、連動杆98の後下側には、左右方向に屈曲されかつ前記一方の揺動アーム81に上側から接当される接当部101が形成され、かつ接当部101自体に又はその近辺に目盛り96と対向する指標部101aが形成され、前記指標部101aが揺動アーム81の上下揺動に連動して前記目盛り96に沿って前後に移動自在とされている。
(もっと読む)
歩行型管理機
【課題】
操作ハンドル17を取外すことなくコンパクトに収納することができる歩行型管理機1を提供する。
【解決手段】
ロータリ耕耘装置19を備えた歩行型管理機1において、ハンドルフレーム16をミッションケース2から後部上方に向かって延設して形成すると共に、前記ロータリ耕耘装置19に近接した位置に操作ハンドル17の収納位置P2を設け、操作ハンドル17の先端側を操作ハンドル17の中途部から下方へ屈曲させた操作ハンドル17を、作業時に使用する作業位置から下方に向けて回動させて、収納位置P2に固定可能とした。
(もっと読む)
歩行型耕耘機
【課題】
操作ハンドルを前後方向に反転可能に構成し、通常の耕耘作業時には機体後側に把持部を位置させ、畝立て作業あるいは溝堀作業時は機体前側に位置するよう反転する耕耘機において、畝立て作業時あるいは溝堀作業時の操作性を良好にしながら溝堀能力を向上させること課題とする。
【解決手段】
走行車輪(4)と、耕耘爪(5)と、操作ハンドル(8)を備えた歩行型耕耘機において、走行車輪(4)の後側に耕耘爪(5)を配置し、操作ハンドル(8)の把持部(11)を機体後側又は機体前側に反転可能にすべく操作ハンドル(8)の基部(13)を縦軸心周りに前後方向に回動可能に構成し、操作ハンドル(8)の把持部(11)が機体前側に位置するときに、操作ハンドル(8)の基部の取付位置を耕耘爪(5)側に移動可能に構成したことを特徴とする。
(もっと読む)
歩行型電動耕耘機及び運転制御方法
【課題】耕耘作業中に電動モータに大きな負荷がかかったとき電動耕耘機の挙動が不安定になることを極力防止し、その制御を自動で行うようにして、操作性を改善した歩行型電動耕耘機の運転制御方法を提供する。
【解決手段】耕耘作業中において、電動モータ(2)にかかる負荷を検出し、該負荷が所要の閾値以上であるときは、前記電動モータ(2)を通常回転又は低速回転から停止させ、前記負荷が所要の閾値未満であるときは、電動モータ(2)を通常回転から低速回転に切り替える歩行型電動耕耘機の運転制御方法。
(もっと読む)
31 - 40 / 398
[ Back to top ]