
国際特許分類[A01B33/08]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 駆動回転具を有する耕うん用作業機 (988) | 器具;細部,例.変速機構または伝動機構 (697)
国際特許分類[A01B33/08]の下位に属する分類
器具の構造的または機能的特徴 (53)
器具の組み合わせ;器具のカバー (222)
器具の回転軸への取り付け,例.弾性的に取りつけられた器具 (24)
国際特許分類[A01B33/08]に分類される特許
81 - 90 / 398
歩行型管理機
【課題】歩行型管理機を用いての畝立て作業を、機材の取り換えの手間を要することなく能率よく行えるようにすること。
【解決手段】操縦ハンドル4を後方に延出した走行機体1に耕起ロータ16を装備するとともに、走行機体1の後部に機体上下向きの棒13を配備し、耕起ロータ16で耕起した土を押圧して畝を成形する成形板を備えた培土器20を、耕起ロータ16と棒13との間に配備し、成形板の左右方向の中央部に成形板よりも曲げ力に対して強度の高い部材を備え、成形板の左右方向の両側端辺を、畝の側面を押圧する反力によって、成形板の左右方向の中央部に配置してある棒13の両側部に屈曲可能に構成し、棒13にて成形板の後方側への移動を規制してある。
(もっと読む)
歩行型農作業機

【課題】機体の下側に配置された左右方向の耕耘ロータリの後方に、後方斜め下方に延出された抵抗棒を備え、機体のヘッドアップ作動を、効率的に抑制可能な歩行型農作業機を提供することを課題とする。
【解決手段】本発明は、機体5下側の左右方向の耕耘ロータリ4後方に配置されて後方斜め下方に傾斜した抵抗棒21と、機体5の後方斜め上方に突設された操向ハンドル7とを備え、抵抗棒21の延出側端部21aを土中に挿入させた状態で耕耘ロータリ4を前進側に回転駆動させることにより、耕耘作業を行う歩行型農作業機であって、圃場に接地させた作業ポジションP2で機体5に固定させることが可能な接地輪22を、抵抗棒21と耕耘ロータリ4との間における抵抗棒21寄り箇所に設け、機体5の姿勢を水平方向に向けた際に接地輪22下端の上下位置を、抵抗棒21の上記延出側端部21aよりも低く設定した。
(もっと読む)
農作業機
【課題】
泥土等によってもゲージ輪を円滑に上下揺動させることができる農作業機を提供することを課題としている。
【解決手段】
車輪4の前方にロータリ6を配置し、耕耘深さを維持するゲージ輪23をゲージ輪アーム24を介してロータリ6の前方に上下揺動自在に設けた農作業機において、ロータリ6を軸支するロータリ軸3の軸受け側にブラケット22を突設し、上記ブラケット22にゲージ輪アーム24の揺動支点を設け、ブラケット22でアーム24を揺動自在に支持し、ブラケット22に、ゲージ輪アーム24の揺動位置を位置決めする位置決め部38を有するガイド溝37を設け、ゲージ輪アーム24側に上記位置決め部38にゲージ輪アーム24を係止して位置決めする位置決め機構を設け、上記ゲージ輪アーム24の上下揺動操作によって、ブラケット22側面に付着した泥土を掻き落とす部材24aをゲージ輪アーム24のブラケット22の両側面に取り付けた。
(もっと読む)
歩行型耕耘機
【課題】非使用時における歩行型耕耘機の一層のコンパクト化を図りつつ、収納姿勢で好適に収納・運搬し得る歩行型耕耘機を提供する。
【解決手段】本発明に係る歩行型耕耘機は、作業用ハンドル3を、把持部31a、31bが駆動部2よりもさらに他端側すなわち上方に位置付けられた使用姿勢Pと把持部31a、31bが耕耘部1の一端側すなわち下方から添接する収納姿勢Pとの間で姿勢変更させる姿勢変更機構を具備する。これにより、収納姿勢Qにおいてロータ11に優先して左右の把持部31a、31bが他のものに当たるので、頑丈且つ鋭利なロータ11が直接或いは間接的に他のものに干渉するという不具合が起こる可能性を有効に排除している。
(もっと読む)
電動耕耘機
【課題】二次電池の電池容量が低下したこを作業者が容易に把握できる電動耕耘機を提供すること。
【解決手段】
圃場を耕耘するロータリ部Rを駆動する電動モータ8に電力を供給するバッテリ48の電圧が予め設定されている基準電圧と比較して、両電圧の差が所定値未満であると、それから所定時間継続したら電気容量が低下したことを表示部26に赤色表示させることでバッテリ48の残量容量が容易に分かるので、耕耘作業途中で電源切れ等が発生するおそれがない。
(もっと読む)
農作業機
【課題】トラクタの後方に連結される農作業機の作業時間を確認するための稼働時間確認手段を設けた農作業機を提供する。
【解決手段】トラクタの後方に連結されて、トラクタのPTO軸11にジョイント12等の回転伝達手段を介して回転を伝達して作業を行う農作業機において、回転部の回転数により作業時間を算出する稼働時間確認手段55を設けるとともに、前記回転部に発電装置を設け、さらに前記回転部の回転を検知する回転認識センサを設けることを特徴とする農作業機。
(もっと読む)
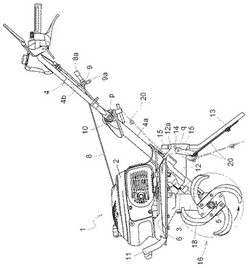
歩行型管理機
【課題】
歩行型管理機を用いての畝立て作業を、機材の取り換えの手間を要することなく能率よく行えるようにする。
【解決手段】
エンジン4を有する走行機体と、該走行機体の後方にハンドル15を延出し、該エンジン4の駆動力で動力伝達機構を介して耕耘軸9を回転させ、該耕耘軸9に備えた耕耘爪10の回転により耕耘する歩行型管理機1において、前記耕耘軸9より後方で走行機体の後部に抵抗棒13を配置し、前記耕耘爪10で耕起した土を押圧して畝を成形する培土器14を、前記耕耘爪10と抵抗棒13の間に配置し、該培土器14を幅調整自在に構成し、該幅調整をハンドル15の近傍に備えた操作部からの遠隔操作により行うようにしたものである。
(もっと読む)
耕耘作業機
【課題】ハンドル持上荷重を抑制可能で、さらにコンパクト性を維持可能で、加えてロータを安定的に支持可能な耕耘作業機を提供する。
【解決手段】耕耘作業機10は、減速ケース42の下端部42cから左右側に駆動軸44が突出され、駆動軸に左右のロータ25,26が着脱自在に嵌合され、減速ケースの後上端部42bからハンドルコラム17が機体後方に向けて延出されている。この耕耘作業機10は、減速ケースに設けられるとともに機体幅方向へ延伸された支持部材51と、支持部材の両端部からハンドルコラムに沿って機体後方に延伸された左右のスタッド部52,53とを備えている。左右のスタッド部に左右ロータの回転軸31,36が嵌合される。
(もっと読む)
歩行型耕耘機
【課題】
本発明は、培土板を備えた歩行型の耕耘機において、培土作業位置と運搬作業位置とに簡単に切り換えることを課題とする。
【解決手段】
機体に操作ハンドル(13)と圃場を耕耘する耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、耕耘部(K)の後方に設ける転輪(17)を設けた歩行型耕耘機において、転輪(17)と培土板(B)とを支持体(25)に取りつけると共に、支持体(25)は上部を回動支点に横軸芯に回動する構成とし、支持体(25)の回動動作により、転輪(17)と培土板(B)が一体となって、畝を形成する培土作業位置と歩行型耕耘機を運搬する運搬作業位置とに切り換えることを特徴とする。
(もっと読む)
歩行型管理機
【課題】アタッチメントとして提供されている従来の培土器を使用することなく、うね立て作業を可能にすると共に、培土板を取り外すことなく、通常の耕耘作業を可能にする。
【解決手段】機体から左右外側方に延出する車軸9に、複数の耕耘爪10を備える車軸耕耘式の歩行型管理機1であって、機体の後部に、圃場に接触して走行抵抗を発生させる抵抗棒13用の取付部(作業機連結ヒッチ12)と、機体移動時に機体後部を支える移動尾輪21用の取付部とを備え、該移動尾輪21用の取付部を、移動尾輪21を接地高さに保持する下降姿勢と、移動尾輪21を非接地高さ保持する上昇姿勢とに回動変姿自在な移動尾輪ブラケット20で構成すると共に、該移動尾輪ブラケット20に、うね立て用の培土板24を設ける。
(もっと読む)
81 - 90 / 398
[ Back to top ]