
国際特許分類[A61F2/72]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 操作または制御手段 (206) | 電気的なもの (118) | 生体電気的制御,例.筋電によるもの (45)
国際特許分類[A61F2/72]に分類される特許
11 - 20 / 45
装着式動作補助装置及びその制御方法
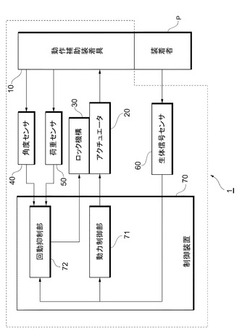
【課題】回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制する。
【解決手段】装着式動作補助装置1は、複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる動作補助装着具10を備えるとともに、動作補助装着具10による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える。
(もっと読む)
外骨格型ロボット

【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
行動識別装置
【課題】日常生活に支障のない身体の部位から検知された生体情報に基づいて使用者の行動を識別することができる行動識別装置を提供する。
【解決手段】使用者の額に装着された生体電極1により検知された生体信号は生体信号取得部2により取得され、前処理部4はその生体信号から周波数に基づいて分離した被識別データを生成する。行動識別部10は被識別データに基づいて使用者の行動を識別する。
(もっと読む)
上肢運動モデル
【課題】応答性能を向上させることができ、比較的急速な運動であっても良好な再現性が得られ、上肢の動作特性を十分に表現することができる上肢運動モデルを提供する。
【解決手段】所定の回転軸を中心に回転する目標指針に、該目標指針と同軸回転するリンクを追従させる位置決め操作にともなう人間の上肢の動作をモデル化した上肢運動モデルであって、目・脳モデル化部13と、上肢モデル化部14と、インターフェイスモデル化部12とを備え、目・脳モデル化部13に誤差補償感度係数βにより調整されるフィードフォワード項を有し、上肢モデル化部14に力覚フィードバック結合特性α(s)によるフィードバック項を有することで、視覚・力覚混合型フィードバックモデルとして構成される。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は生体信号の検出感度に応じたパラメータに補正することを課題とする。
【解決手段】動作補助装置10のキャリブレーション制御手段162は、装着者12が動作補助装着具を装着したときに、負荷発生手段164により電力増幅手段158に対して駆動源140からの駆動力を負荷(入力トルク)として装着者12に付与させる。そして、駆動源140からの駆動力を付与された装着者12は、予め決められた所定キャリブレーション動作を行って骨格筋から力を発生させる。これにより、上記キャリブレーション動作に伴って物理現象検出手段142が関節角度を検出し、生体信号検出手段144が筋電位信号を検出する。パラメータ補正手段156では、フェーズ特定手段152によって特定されたフェーズにおける差分導出手段154によって算出された負荷(入力トルク)と駆動力(筋力)との差に基づいてパラメータKを補正する。
(もっと読む)
動作補助装置、及び該動作補助装置を管理する情報管理装置
【課題】動作補助装置の使用状況を効率よく管理し、最適な状態を維持する。
【解決手段】動作補助装置において、装着者の関節の角度を検出する第1の検出手段と、装着者の筋活動に伴う生体信号を検出する第2の検出手段と、駆動源の駆動トルクを検出する第3の検出手段と、基準パラメータデータベース、指令信号データベース、及び前記第1から第3の検出手段の検出信号からなる動作履歴情報が格納される格納手段と、前記動作履歴情報を管理者側に送信し、前記管理者側からの前記基準パラメータ及び/又は指令信号を受信する通信手段と、前記更新情報の該当するフェーズに対応させて更新情報を格納する更新制御手段と、関節角度信号と、基準パラメータとを比較することにより、前記装着者の動作のフェーズを推定し、推定されたフェーズに対応する指令信号に基づいて、前記駆動源を駆動する制御手段を備えることにより、上記課題を解決する。
(もっと読む)
下肢人工固有受容体の位置決め
【課題】本方法は、片方に健全な脚(12)を有する個体(10)の、下半身のもう一方側に設けた義足(14)の駆動装置(16)を制御するために使用される。
【解決手段】その方法は、したがって、複数の人工固有受容体(20)を設け、前記人工固有受容体(20)の少なくとも1つは健康な脚(12)の側に、前記人工固有受容体(20)の少なくとも1つは義足(14)の設けられた側にある工程と、前記固有受容体(20)でリアル・タイムにデータ信号を発生させる工程と、前記データ信号に応答して、駆動装置(16)を制御するために、リアル・タイムに制御信号を発生させる工程とを含む。
(もっと読む)
装着式動作補助装置
【課題】本発明は駆動部の駆動力を動作補助手袋に効率良く伝達することを課題とする。
【解決手段】装着式動作補助装置10は、装着者の指に装着される動作補助手袋20からなり、通常の動作補助手袋と同様に装着される。動作補助手袋20には、被駆動部30と、駆動部40と、線状部材50と、生体信号検出部60と、制御ユニット70とが設けられている。動作補助手袋20は、装着者の手に密着するように手のサイズに合わせた立体的な形状に形成されている。動作補助手袋20の手甲側には、複数の線状部材50が各指の延在方向に沿うように配されている。複数の線状部材50が、伸展方向または屈曲方向に動作すると共に、動作補助手袋20の各指も線状部材50と一体に伸展方向または屈曲方向に動作する。
(もっと読む)
動力義肢の制御方法、及び当該方法が適用された動力義肢
【課題】患肢に装着した動力義肢において、従来は不可能であった巧緻な随意的運動を実現可能とする動力義肢の制御方法及びこれを適用した動力義肢を提供する。
【解決手段】上肢若しくは下肢の一部若しくは全部を欠損した患肢Aと、随意的に動かし得る関節Hとを有する人体に適用される動力義肢1を制御するための方法であって、随意的に動かし得る関節の一又は複数の関節変位を、計測手段3により第1の関節変位として計測するステップと、第1の関節変位の一般化座標空間から動力義肢1の関節変位の一般化座標空間への適切な写像を演算手段5により演算し、第2の関節変位として算出するステップと、第2の関節変位を目標値として、制御手段4、10、20により患肢に適用した動力義肢の一又は複数の関節変位制御を行なうステップと、からなることを特徴とする動力義肢の制御方法及びこれを適用した動力義肢とする。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は、回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制することを課題とする。
【解決手段】装着式動作補助装置1は、複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる動作補助装着具10を備えるとともに、動作補助装着具10による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える。
(もっと読む)
11 - 20 / 45
[ Back to top ]