
国際特許分類[A61F2/74]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 操作または制御手段 (206) | 流体制御 (23)
国際特許分類[A61F2/74]に分類される特許
1 - 10 / 23
筋力補助装置及びその動作方法
【課題】第1の装着具に対する第2の装着具の曲げ角度を大きくすることができる筋力補助装置を提供する。
【解決手段】筋力補助装置は、関節の一方の骨に沿って配置される第1の装着具10と、関節の他方の骨に沿って配置される第2の装着具20と、第1の装着具10に一端31を、第2の装着具20に他端32を設ける人工筋30とを備え、使用者の肘、膝、又は手首の動作を支援し、第1の装着具10に一端51を設ける補助人工筋50を備え、補助人工筋50の他端52を、スイングアーム40を介して人工筋30の一端31と接続し、補助人工筋50によって、人工筋30の一端31を第1の装着具10に対して変位可能な構成としたことを特徴とする。
(もっと読む)
上腕保持装置、及び、上腕補助装置

【課題】利用者の前腕部分、及び、手部分の動きの関連づけを実現することの可能な上腕保持装置、及び、上腕補助装置を提供する。
【解決手段】肘下椀部40と連結された内側連結部41には、連結紐88を介してグローブ90連結されている。連結紐88は、非伸縮性で且つ変形自在の材料で構成されている。グローブ90は、連結紐88が変形することにより、内側連結部41と相対移動可能となっている。
(もっと読む)
装着式動作補助装置
【課題】本発明は消費電力が小さく、小型化及び軽量化された装着式動作補助装置を提供することを課題とする。
【解決手段】装着式動作補助装置10は、発生部20と、回転軸30と、弾性部材40と、コイル50と、補助力制御部60と、第1結合部材70と、第2結合部材80とを備えている。弾性部材40は、回転軸30とケース22との相対回転により弾性力を蓄積する。また、力発生部20では、装着者の足が屈曲状態から伸長状態に動作する過程で弾性部材40の弾性力が回転軸30を回転させる駆動力(補助力)となって伝達される。切替スイッチ110をオンに切替えると、コイル50が励磁されて磁気粘性流体100が固化されるため、回転軸30及び弾性部材40が静止状態に保持される。また、コイル50の磁場によって保持された弾性部材40の弾性力は、切替スイッチ110をオフに切替えてコイル50への電流をゼロに切替えることで、開放される。
(もっと読む)
リハビリ装置
【課題】回内や回外と言われる関節のねじりを矯正することができるリハビリ装置を提供すること。
【解決手段】本発明のリハビリ装置は、関節の一方の骨に対して他方の骨にねじりを与え、第2の装着具20の外周に第1の装着具10を設け、第2の装着具20の外周面と第1の装着具10の内周面との間に回動機構を設け、第2の装着具20には長手方向に対して傾斜させたガイド機構14を、第1の装着具10には長手方向に第1のガイド溝13をそれぞれ設け、長手方向に長さを変化させる駆動部40の一端を、ガイド機構14及び第1のガイド溝13に、駆動部40の他端を第1の装着具10に連結したことを特徴とする。
(もっと読む)
大腿切断患者用自動義足
切断患者の大腿連結部(100)に適用される大腿義足(P)であって、患者の大腿連結部に連結される上部ヒンジ(1)、膝の動きを再現する機能を有する関節軸(2)、大腿部に駆動可能に連結する脛骨・ふくらはぎ筋肉装置(3)およびふくらはぎ筋肉の機能をいくらか再現し、義足がブレーキをかけ、歩行の典型的な連続したスイングとスタンス段階を可能にするダンパ(5)とを備える。ダンパはシリンダ(5c)を備え、ピストン(10)およびステム(9)が互いに連結作用して、義足にかかる力に対応して、該ダンパの減衰反応をもたらす。特に、力変換器はダンパ、特にステムに設ける。マイクロプロセッサは変換器から力信号を受信し、検出された力信号に応じてダンパの反応を調整する手段を作動させる。 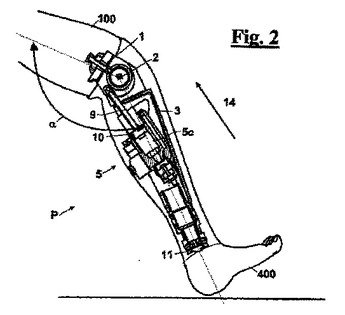 (もっと読む)
(もっと読む)
歩行能力についての評価方法および評価装置
【課題】少ない歩数においても歩行能力を客観的に評価することができる技術の提供。
【解決手段】マイクロコンピュータによって歩行周期を多段階に分割し、グループ化することを前提とする。義足装着者が歩行訓練をするとき、訓練が進むにつれて、時系列的に取得する歩行周期がグループを超えて変化する傾向が大である。そこで、そのような歩行周期の変化、すなわち、グループあるいはブロックの移動回数や頻度の大きさを歩行能力のための評価指標とすることができる。マイクロコンピュータ機能をもつインテリジェント義足などでは、義足自体が備えるマイコン回路およびセンサ手段などを活用して評価を行うことができる。
(もっと読む)
人工関節装置及びその操作方法
【課題】人工膝関節用の制御が容易に可能な制動システムの提供。
【解決手段】分散し、交互に並ぶ複数のロータ220とステータ230を使用して間に形成されるギャップ内の磁気レオロジー流体を剪断する可変トルク磁気レオロジー作動人工膝210である。「剪断モード」の動作では、流体の圧力上昇または圧力変化は実質的にないか、無視できるくらい小さいため都合がよい。さらに、望ましくは、複数のMR流体ギャップまたは流束界面ではトランスミッションを使用しなくても低速で強いトルクが得られ、また動的トルク範囲が広い。一実施形態では、ロータ220および/またはステータ230間のギャップを閉じて、摩擦トルク成分を発生し、それにより、「ハイブリッド」制動システムを形成し、粘性トルクと摩擦トルクの組合せである全トルクまたはダンピングを発生させることができる。
(もっと読む)
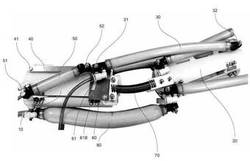
補綴装置および真空を使った接続システム
補綴装置は、真空を使って人に接続するための接続部分と、接続部分を人に接続するのに使われる真空の量を制御する制御構造からなり、制御構造は、接続部分を人に接続するのに使われる真空の量を制御するための、接続部分と流体通信している真空ポンプ(502)と、接続部分中の真空の量を示す信号を提供するように構成された真空感知メカニズム(506)と、補綴装置の加速度と、補綴装置の向きと、補綴装置によって経験された力と、補綴装置によって経験された力の方向の少なくとも1つを示す信号を提供するように構成された動き感知メカニズム(509)と、真空感知メカニズム(506)と動き感知メカニズム(509)からの信号を受け取り、真空ポンプ(502)を制御するように構成されたコントローラと、を含む。  (もっと読む)
(もっと読む)
直動伸縮アクチュエータ
【課題】歪センサの取り付けが容易で、信号雑音比が改善された直動伸縮アクチュエータを実現する。
【解決手段】直動伸縮アクチュエータ1は、長軸方向に伸縮可能なチューブ2と、チューブ2の周方向の伸縮歪を検出するためにチューブ2の外周面を周方向に沿って覆う弾性体4を有する歪センサ3とを備えている。
(もっと読む)
整形外科用の足部および整形外科用の足部を制御するための方法
【課題】従来のタイプの整形外科用の足部を、整形外科用の足部の特性への従来よりも多い要求が、踝関節を中心とした動きの制動のもっぱらパッシブな制御プロセスによって、応じられるように、制御可能に構成する。
【解決手段】センサ装置は、下腿接続部と足部10との間の角度を測定する踝角度センサ7と、垂直線に対する絶対角度センサ20と、踝関節5におけるトルクまたは踝関節5におけるトルクを発生させる力を検出するためのモーメント・センサ21とを有する。
(もっと読む)
1 - 10 / 23
[ Back to top ]