
国際特許分類[B23P21/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ユニットを構成するべく種々の多数の部品を組立てる機械で,そのような部品の先後加工があるものまたはないもの,例.プログラム制御付きのもの (845)
国際特許分類[B23P21/00]に分類される特許
141 - 150 / 845
組付治具を備える治具装置
【課題】治具装置において、組付対象物に組み付けられる物品の組付位置の設定精度の向上を図り、かつ治具装置の設計の自由度を大きくする。
【解決手段】位置決め部材20,30は、回動中心線L1,L2を中心に回動可能に基台10に設けられ、位置設定部材40,50は、基準点P1(,P2)に対応する基準点対応部位Q1,Q2を有するスケール43,53と、基準点対応部位Q1,Q2に当接するダイヤルゲージ47,57とを備える。基準点対応部位Q1,Q2は、回動中心線L1,L2を中心とすると共に回動中心線L1,L2と基準点P1(,P2)との距離を半径とした仮想円上に位置する。ダイヤルゲージ47,57は、基準点対応部位Q1,Q2に当接した状態で回動中心線L1,L2を中心に回動する位置決め部材20,30の回動位置を変更可能である。
(もっと読む)
ガラス調整治具およびガラス調整方法

【課題】車両用サッシュレスドアのドアパネルに組み付けられる窓ガラスの組み付け精度を高めることができるガラス調整治具を提供することを課題とする。
【解決手段】車両用サッシュレスドア1のドアパネル2に組み付けられる窓ガラス3の組み付け位置を調整するためのガラス調整治具20であって、ドアパネル2に取り付けられるフレーム部材30と、ドアパネル2に組み付けられた窓ガラス3の縁部に当接することで、窓ガラス3を位置決めする規制部材50,60を有するガラス位置決め機構40と、を備え、ガラス位置決め機構40は、フレーム部材30に設けられており、フレーム部材30は、ドアパネル2のヒンジ部2a,2aおよびドアロック部2bに係合されることで、ドアパネル2に対して位置決めされる。
(もっと読む)
組付け部品の検査方法および検査装置
【課題】部分形状や材質が異なる類似の組付け部品を単品でも組付け後でも容易にかつ確実に判別でき、しかも、組付けコストを低減できる組付け部品の検査方法および検査装置を提供する。
【解決手段】複数種のバルブシート12のそれぞれに、シリンダヘッド本体11に組み付けられたときに外部に露出する露出面12aを設けるとともに、その露出面12aからの離間距離dが複数種の種類ごとに異なる種類判別用の種別壁面12fを、そのバルブシート12がシリンダヘッド本体11に組み付けられたときにシリンダヘッド本体11中に没入する範囲内に形成しておき、露出面12aからの種別壁面12fの離間距離dを超音波計測して予め指定された種類のバルブシート12であるか否かを判別する。
(もっと読む)
ワーク検出装置
【課題】光源からワークまでの距離が変化する場合であっても、ワークの材質や仕様の判定を行うことができる。
【解決手段】表面の光の反射特性が異なるワーク3が複数積み重ねられ、ワーク3の取り出し毎に最上部に位置するワーク3の種類を判定するワーク検出装置1であって、ワーク3を載置するパレット6と、パレット6から所定距離隔てて配置されると共に、所定の光量でワークの表面を撮像するカメラ8−1、8−2と、ワーク3の種類及び積層高さに対応した複数のワーク3の基準画像を記憶するメモリ13と、カメラ8−1、8−2により撮像された撮像画像と基準画像との照合を行う画像処理装置9とを有することを特徴とする。
(もっと読む)
作業システム、ロボット装置、機械製品の製造方法
【課題】人手による作業のための既存の作業スペースや作業設備をできるだけ用いながら、ワークに対する作業を精度良く行なうことができるようにした作業システム及びロボット並びに機械製品の製造方法を提供する。
【解決手段】胴部と、胴部に設置され複数の関節部を有する第1アームと、第1のアームと別体に胴部に設置され複数の関節部を有する第2アームと、第1アーム及び第2アームにそれぞれ設けられたハンド部と、を有するロボットにより複数種類のワーク部品のいずれかの種類のワーク部品については第1アーム及び第2アームのハンド部で同時に保持し、残る種類のワーク部品については第1アーム又は第2アームのハンド部で保持搬送する。
(もっと読む)
作業補助システム及び作業補助方法並びに該作業補助方法を記録した記録媒体
【課題】工場内の生産ラインにおいて、ロボットと一人の作業者が協調して作業を行うシステムを提供する。
【解決手段】作業者の手に装着され、当該手による作業動作を経時的に測定してその測定結果である動作情報を3次元座標データとして送信するモーションキャプチャ2と、作業者の手に装着され、部品に加わる荷重を経時的に測定してその測定結果である圧力検出データを送信する圧力センサ23と、前記3次元座標データ、及び前記圧力検出データに基づき産業用ロボット4を制御する制御部31とを備える。制御部は、モーションキャプチャから得られた3次元座標データにロボットを追従させ、作業者の手が標準作業位置に到達したと判定すると、作業者が手で部品を押圧することで圧力センサから送信される圧力検出データの値に応じた圧力値で、ロボットの保持部で部品を押圧させる保持部押圧機能31bとを有する。
(もっと読む)
ワーク組立て方法
【課題】組立てコストを低減することができるワーク組立て方法を提供する。
【解決手段】作業者が作業する作業者ステーションと、作業者が作業する作業者ステーションと、装置が作業する装置ステーションと、前記作業者ステーション及び前記装置ステーションの相互間で作業対象ワークを搬送する搬送手段と、を備える組立作業セルを用いたワーク組立て方法であって、前記搬送手段が前記作業者ステーションと前記装置ステーションとの間で、交互に前記作業対象ワークを移動させることで、前記作業者と前記装置とが交互にワークの組立て作業を行う。
(もっと読む)
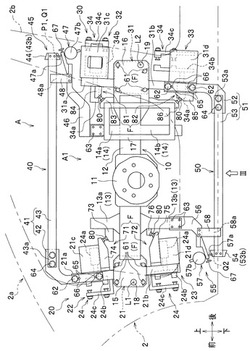
等速ジョイント用ローラ装着装置
【課題】スパイダのトラニオンに対し、ローラを自動的に装着し得る装置を構成する。
【解決手段】等速ジョイント用ローラ装着装置50は、円環形状体からなる基盤62と、該基盤62の略中心に配置された台座64と、この台座64を三方向から囲繞する3個のローラ保持具66a〜66cと、軸部としての位置合わせ用軸68を有する3個の位置合わせ具70a〜70cとを具備する装着用治具52を有する。ローラ保持具66a〜66c及び位置合わせ具70a〜70cは、台座64(スパイダ16)に対して接近・離間可能である。さらに、位置合わせ具70a〜70cの各々には位置合わせ用軸68が設けられている。この位置合わせ用軸68は、トラニオン28a〜28cの軸線方向に沿って延在し、位置合わせ具70a〜70cが前進動作した際には、ローラ保持具66a〜66cのポケット部96に収容されたローラ30a、30bに通される。
(もっと読む)
生産システム
【課題】本発明は、段取り換えを容易にでき、1つのロボットの動作に複数の機能を備え、省スペース化された生産システムを提供する。
【解決手段】ワーク13と、前記ワーク13が載置されたワークストッカ12と、前記ワークストッカ12の搬出口に配置された双腕ロボット11と、前記双腕ロボット11の胴体前方に対向するように配置された第2のロボット21とから構成されたものである。
(もっと読む)
作業管理システム
【課題】システム全体を小型化および簡略化することができる作業管理システムを提供することを課題とする。
【解決手段】作業管理システム1であって、ボルトB1〜B4を締め付けるとともに、ボルトB1〜B4を加工したことを示す加工情報を出力する工具10と、各ボルトB1〜B4に配置された工具10を検出し、工具10の位置情報を出力する検出センサ20と、検出センサ20から入力された位置情報と、位置情報が入力されているときに工具10から入力された加工情報とを対応させて表示する表示部32を有する管理装置30と、を備えている。
(もっと読む)
141 - 150 / 845
[ Back to top ]