
国際特許分類[B23P21/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ユニットを構成するべく種々の多数の部品を組立てる機械で,そのような部品の先後加工があるものまたはないもの,例.プログラム制御付きのもの (845)
国際特許分類[B23P21/00]に分類される特許
111 - 120 / 845
蓋物部材の組付治具及び組付方法
【課題】ストライカを有する蓋物部材を車体に組み付ける際の作業性を高め、生産性を向上させる。
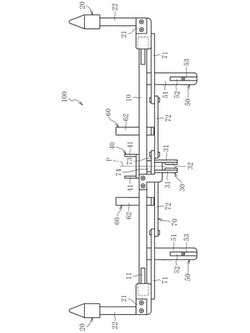
【解決手段】車幅方向間隔を調整可能な一対の係止部20,20と、一対の係止部20,20の車幅方向中央部Pを設定するセンタリング機構70と、車幅方向中央部Pを基準とした車幅方向所定位置に設けられ、該車幅方向所定位置にストライカ7を位置決めするストライカ位置決め部30と、ストライカ位置決め部30と同じ車幅方向所定位置に設けられ、該車幅方向所定位置にロック部材8を位置決めするロック位置決め部40とを備える。
(もっと読む)
熱交換器コアの仮組装置

【課題】 フィンをチューブに仮組する際、フィンがチューブ間の所定位置から逸脱するのを抑止できる熱交換器コアの仮組装置を提供する。
【解決手段】 熱交換器コアの仮組装置1では、回転する外側面に凹部1fを挟む係合部1cを有する送り軸1bが、熱交換器コアを構成する複数のチューブTに係合部を係合してチューブTを並列状態でチューブTの長手方向と直交方向Apへ移動させ、フィン供給部10が熱交換器コアを構成するフィンC1、C2を、チューブTの長手方向に沿って送り軸1bと反対側の側方から送り軸1bへ向けて隣接するチューブT間に交互に挿入する。送り軸1bの上方に位置させてこの凹部1fに挿入し、フィン供給装置10から隣接したチューブT間へ挿入されたフィンC1、C2の、隣接したチューブT間からの逸脱を抑止する第1逸脱抑止部材1gを備える。
(もっと読む)
生産システム
【課題】カメラの振動を抑制してカメラの検知精度を向上させ、ロボットアームやワークの位置決めを高精度に行う。
【解決手段】ロボットセル200は、各架台1031〜1038をそれぞれ囲うように配置された骨組み構造のブース1041〜1048を備えている。また、ロボットセル200は、各ブース1041〜1048にそれぞれ取り付けられ、各ブース1041〜1048のワークスペースを撮像可能としたカメラ1061〜1068を備えている。各ブース1041〜1048は、平面視で短辺xと長辺yとを有する直方体形状に形成されて、長辺側の枠側面同士が対向するように短辺方向Xに沿って隣り合わせて配置されている。そして、複数のブース1041〜1048のうちの隣り合う2つの枠体が、着脱可能な連結部材500で連結されている。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナー径を変更しても、設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるハンド装置及び多関節ロボットを提供する。
【解決手段】
ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置であって、チャックユニット31に、ライナー5の挿入保持位置に対してライナー5の半径方向へ移動可能で、ライナー中心側への移動によってライナー5の端部を外側からクランプする複数のスライドプレート34を設けて、このスライドプレート34におけるライナー5の端部との当接部位を、ライナー5の端部外周面に当接するクランプ35と、ライナー5の軸方向の端面に当接する円形凸部35aとからなる段部形状としたことにある。
(もっと読む)
アイドルギア・シャフト組付装置
【課題】潤滑不良による軸受部の焼き付きを防止できるアイドルギア・シャフト組付装置を提供する。
【解決手段】アイドルギア2を保持するアイドルギアセット台3と、シャフト4を保持するシャフト置き台5と、シャフト4を把持するクランパ6を有すると共にクランパ6をシャフト置き台5の位置からアイドルギアセット台3の位置に移動させる移動部7を有しクランパ6で把持したシャフト4をアイドルギア2の軸受部8内に挿入して組み付けるシャフト組付機構9と、シャフト組付機構9に設けられクランパ6がアイドルギアセット台3の位置に移動するとき軸受部8内に挿入される潤滑油塗布ノズル10と、潤滑油塗布ノズル10に接続され潤滑油塗布ノズル10が軸受部8内に挿入されたとき潤滑油塗布ノズル10に所定量の潤滑油を供給する定量油供給部11とを備えたものである。
(もっと読む)
ブッシュ圧入検査装置、その検査方法、その検査プログラムならびにブッシュ圧入装置
【課題】ブッシュの圧入する圧入開始時点から圧入終了時点のいずれの状態においても良否が検査できるブッシュ圧入検査装置を提供すること。
【解決手段】ブッシュ圧入制御装置1は、構造物の一部に円筒形に形成されたブッシュ圧入部Wa,Wbを有するワークWに、圧入機構25によりブッシュBを先端に支持して所定のストロークで所定の荷重をかけて、前記ブッシュ圧入部に圧入するブッシュ圧入装置20に使用されるブッシュ圧入検査装置において、設定手段2と、記憶手段3と、入力手段4と、判定手段5と、出力手段7とを備える構成とした。
(もっと読む)
チェッカの角度調整装置及び方法
【課題】ブラケットの角度調整が自動化可能なチェッカの角度調整装置及び方法を提供する。
【解決手段】チェッカ1の角度調整装置10は、ブラケット3を下部に位置させてチェッカ1のアーム2を保持するアーム保持機構20と、保持されたアーム2に対してブラケット3を揺動させて押し上げるブラケット押上機構30と、傾斜ガイド面51aを有するガイド部材51を所定位置に位置させるガイド設定機構50と、ブラケット3を揺動させて押し下げ、傾斜ガイド面51aにブラケット3を当接させるガイド当接機構60とを備える。
(もっと読む)
板金部品製造装置
【課題】コンパクトな装置によって、ワークをブレージングする前の位置決めを精度よく行い、ブレージング治具の動きの自由度も大きい板金部品製造装置を提供する。
【解決手段】トランクリッド製造装置100は、アッパパネル120およびロアパネル130(ワーク)の一方の側180、190をそれぞれ加圧するハンド治具140と、ワークの他方の側200、210をそれぞれ支持してワークの動きを規制する、ハンド治具140と別体の2つのロケータ192、194と、加圧の方向と直交する方向へロケータを移動させてワークを溶接位置に位置決めする位置決め手段220と、ハンド治具140を、2つのロケータに対向する加圧用ポジションと、加圧用ポジションを外れた退避ポジションとに搬送する搬送ロボット225と、を備えることを特徴とする。
(もっと読む)
セル生産システム
【課題】セル生産システムにおいて、簡単な構成により、セル生産の柔軟性を活かしなが
ら作業性の向上を図る。
【解決手段】システム1は、作業者M,M1,M2(代表してM)がワークWと共に移動
しつつワークWに対する処理を行うことによりワークWを製品化する作業を繰り返して製
品を順次生産するためのシステムであり、ワークWを移送するコンベア2と、作業者Mを
認識する検出装置3と、コンベア2を制御する制御装置4と、を備え、制御装置4は検出
装置3による認識結果に基づいてコンベア2の駆動速度を作業者Mごとに変化させる。検
出装置3による作業者Mの認識は、作業者Mの腕に取り付けたデータ送信部5を用いて行
われる。セル生産の柔軟性を活かしながら、コンベア2によるワークWの移動速度を各作
業者Mに合わせることができ、作業時間短縮と作業性向上を実現できる。
(もっと読む)
製造作業機
【課題】複数の作業要素実行装置によって製造作業を行う製造作業機の実用性を向上させる。
【解決手段】複数の作業要素実行装置40,28,32等と、それら作業要素実行装置を、複数の動作指令を順次送信することによって統括して制御する統括制御装置130,136とを備えた製造作業機において、各作業要素実行装置が、自身の作動の制御を司る個別制御装置90,100,104等と、自身の対象となる作業要素を実行するのための作動デバイス58,72,78等とを備え、各個別制御装置が、統括制御装置から送信された動作指令の内容を認識し、動作指令に対応した動作を行うべく作動デバイスの作動を制御するように構成する。このように構成すれば、統括制御装置は、敢えて送信先の作業要素実行装置毎に動作指令のプログラミング言語を変更する必要がなくなり、製造作業機の実用性を高めることが可能となる。
(もっと読む)
111 - 120 / 845
[ Back to top ]