
国際特許分類[B23P21/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ユニットを構成するべく種々の多数の部品を組立てる機械で,そのような部品の先後加工があるものまたはないもの,例.プログラム制御付きのもの (845)
国際特許分類[B23P21/00]に分類される特許
151 - 160 / 845
パイプ組立装置
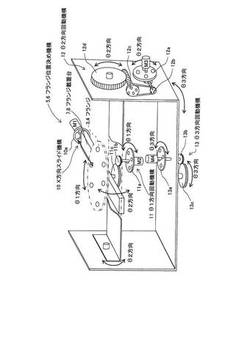
【課題】 設計管製作用データに基づいてフランジ付き管を再現する、簡易型で小型軽量の安価なパイプ組立装置を提供する。
【解決手段】 ガスや水道などの流体の搬送に用いる直管や曲がり管を接続する接続管2のパイプの両端に接続用のフランジ3、4を電子データに基づいて再現精度良く溶接固定するパイプ組立装置1であって、パイプ組立装置1は、少なくとも一方が水平面上を互いに離間する方向に近接又は離反して移動可能な左右一対の第1、第2のフランジ位置決め機構5、6を備え、フランジ位置決め機構5、6は、フランジ3、4を固定してX方向に沿ってスライドさせるX方向スライド機構10を備えたフランジ載置台7、8と、フランジ載置台7、8を平面的に回動させるθ1方向回動機構11と、θ1方向回動機構11を垂直方向に回動させるθ2方向回動機構12と、θ2方向回動機構12を水平方向に回動させるθ3方向回動機構13と、を備える。
(もっと読む)
組付け搬送装置

【課題】精度高く部品を車体に組付け可能な組付け搬送装置を提供する。
【解決手段】組付け搬送装置10は、チェーンコンベア1、ハンガ2、自走台車3、及びロボット4を備える。ハンガ2は、車体Wを懸架し、チェーンコンベア1に牽引される。自走台車3は、ハンガ2と共に車体Wが搭載され、部品組立ラインALを往復動する。ロボット4は、自走台車3と同期して移動する。チェーンコンベア1は、部品組立ラインALの始端部ではハンガ2との係合が解除され、部品組立ラインALの終端部ではハンガ2が再び係合する。これにより、組付け搬送装置10は、部品を車体Wに組付け中は、パワーチェーン12の振動が車体Wに伝達することなく、精度高く部品を車体Wに組付けることができる。
(もっと読む)
組立て装置
本発明は、車両ボディ(14)を加工するための産業ロボット(24)を備える組立て装置(20)に関する。この産業ロボット(24)は、車両ボディ(14)に接続することによって、コンベヤベルト(12、18)が車両ボディ(14)を送る搬送方向(16)に一緒に移動することができる。この産業ロボットは、どのような搬送状況においても、全ての方向でワークピースに対して正確な位置を保っている。輸送プラットフォーム(22)は産業ロボット(24)の輸送に用いられ、産業ロボット(24)が車両ボディ(14)から連結解除されている場合、この輸送プラットフォーム(22)は搬送装置(12、18)とは無関係に、レール接続なしに移動可能である。好ましくは、輸送プラットフォーム(22)に構成部品リザーバを接続することができ、それによってこの構成部品リザーバは輸送プラットフォーム(22)によって一緒に動かされる。この産業ロボット(24)は特に小さな積載量で設計できることから、低コストの組立て装置(20)が実現可能である。 (もっと読む)
フレキシブル生産システム
【課題】フレキシブル生産システムにおいて、簡単な構成により、ロボットを主体として機械化した生産システムでありながら、人手による作業の分担介入が可能で、生産規模の増減やシステムの移設組み換えが容易なシステムを実現する。
【解決手段】本システム1は、床面に対して任意の回転位置で停止自在とされた回転テーブル2と、回転テーブル2の周囲に配置され、部品に対して処理を行う処理装置31〜34と、回転テーブル2に配置され、処理装置31〜34に対して部品の投入と受取を行うと共に、部品に対して処理を行うロボット4と、部品を供給する部品供給装置5と、を備えている。部品を処理する工程が回転テーブル2の一定の回転方向に沿って行われ、ロボット4が部品供給装置5から供給された部品を所持して回転テーブル2と共に回転しつつ処理装置31〜34に部品の処理をさせると共に自らも部品に対する処理を行って完成品の生産が繰り返される。
(もっと読む)
部品の組立作業支援システム
【課題】組立作業中に正しい部品の組み合わせが行われるような誘導を行う。
【解決手段】複数の部品A〜Gからなる製品についての組立作業を支援する。各部品A〜Gに、部品用ICタグTa〜Tgを予め取り付け、それぞれの部品に固有の部品コードを記録しておく。各ICタグと無線交信可能な部品確認装置200には、各組立手順1〜3のそれぞれを示すメッセージと、各組立手順で使用する部品に固有の部品コードと、を含む支援データが用意される。部品確認装置200は、特定の組立手順を示すメッセージを提示し、その間に特定の部品コードが読み取られたときに、当該部品コードが、現時点で提示されている特定の組立手順で使用する部品に固有の部品コードのいずれかに一致するか否かを判定して、その結果を報知する。
(もっと読む)
車体生産装置
【課題】位置決めロボットが部品の搬送と部品の治具としての機能を発揮することで、車体である主要組製品を比較的容易に生産できる車体生産装置を提供することにある。
【解決手段】各溶組工程域Enで主要組製品WNを生産し、後段の溶組工程域Enに搬送することを繰り返すことで車体を製造する車体生産装置Aにおいて、溶組工程域Enには、溶組制御をする工程域制御手段30と、部品mをセット位置dに位置決めする位置決めロボット40と、部品mの溶接を行う溶接ロボット50と、部品mを支持する支持台とが配備され、工程域制御手段30は、位置決めロボット40により部品mを取り出しセット位置dへ位置決めし、溶接ロボット50により部品mの溶接を行って主要仮組製品Wnを生産し、次いで、待機位置s0に位置決めロボット40を待機させた後、溶接ロボット50にて主要仮組製品Wnの溶接箇所の増打を行い主要組製品WNが生産される。
(もっと読む)
作業指示提供システム、作業指示提供装置、制御方法、及びプログラム
【課題】順序関係のある複数の処理をそれぞれ異なる機械によって行う場合に、当該一連の処理に関連する作業指示を提供する。
【解決手段】運搬作業者端末と、作業指示提供装置とを備え、作業指示提供装置は、スケジュール入力受付部と、一致判定部と、第1の物品特定部と、物品が一致すると一致判定部が判定した場合に、当該物品を処理終了時に得る機械を特定する第1の機械特定部と、物品が一致すると一致判定部が判定した場合に、当該物品を処理開始時に必要とする機械を特定する第2の機械特定部と、第1の物品特定部が特定した物品を、第1の機械特定部が特定した機械の場所から、第2の機械特定部が特定した機械の場所へ運搬するよう、運搬作業者に指示する旨の内容を含む作業指示を生成する作業指示生成部と、作業指示生成部が生成した作業指示が運搬作業者端末に送信されるよう出力する作業指示出力部とを有する。
(もっと読む)
ころ軸受製造装置及びころ軸受の製造方法
【課題】溝型のころ軸受を製造する際に、簡単に複数のローラを溝に配置することができる、ころ軸受製造装置及びころ軸受製造方法を提供する。
【解決手段】前記内輪に当接し、軸方向が水平方向に沿うように前記内輪を支持する、内輪支持面と前記内輪支持面により支持された前記内輪の上部で前記溝に接続され、前記内輪の上方から前記溝に前記複数のローラを供給する、ローラ供給路と、前記溝と対向するように配置され、前記複数のローラの外周面と当接することにより、供給された前記複数のローラを前記溝に沿わせて下方に導く、ローラガイド面とを具備する。前記ローラ供給路と前記溝との接続部分における軸方向他端側、及び、前記ローラガイド面の軸方向他端側には、軸方向他端側から前記外輪を挿入するためのスペースが設けられている。
(もっと読む)
チェーンコンベヤ装置
【課題】直線走行速度の脈動がなく円滑に走行可能となるとともに、高さをコンパクトにし、簡単な構造のチェーンコンベヤ装置を提供すること。
【解決手段】所定の搬送路に沿って無端状にそれぞれ独立して平行に設けられた少なくとも2条のコンベヤチェーン110を有するチェーンコンベヤ装置100において、各コンベヤチェーン110搬送面の反対側に設けられた係合手段が、搬送方向の少なくとも1個所において同期して回転駆動されるスクリュー軸121と係合して駆動されること。
(もっと読む)
自動車組立設備
【課題】自動車組立設備における組付ライン及びサブラインの設計の自由度を高め、設備スペースを縮小する。
【解決手段】サブラインSEにおいて台車10を搬送するサブライン駆動手段と、組付ラインUにおいて台車10を搬送する組付ライン駆動手段(リフタ60)とを別個に設けたことにより、各ラインにおいて台車10の搬送速度や台車間のピッチ、あるいは各ラインのレイアウトを個別に設定することができるため、設備設計の自由度が高められる。
(もっと読む)
151 - 160 / 845
[ Back to top ]