
国際特許分類[B25J1/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 手によって操作されるマニプレータ (64)
国際特許分類[B25J1/00]の下位に属する分類
関節のあるまたは可撓性のあるもの (9)
剛性もの,例.シェルフリチャー (2)
レーズトング形のもの
壁面に可動的に据え付けるもの (1)
支持体への取付装置をもっているもの
国際特許分類[B25J1/00]に分類される特許
11 - 20 / 52
遠隔操作用把持工具
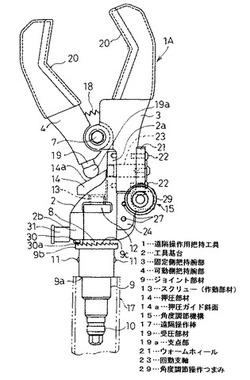
【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
取り寄せ具

【課題】遠方の物品を俊敏にキャッチし取り寄せる、長尺になる取り寄せ具を提供する。
【解決手段】ハンド保持具1にレール収納体3が設けられ、該レール収納体3にはこれから前方に繰り出される伸縮レール4が設けられ、該伸縮レール4に、とってこいスライダー5が設けられ、該とってこいスライダー5に吊下連結材6を介してキャッチ7が設けられている。また後方のスライダーにはスプーン形状のキャッチが設けられている。さらに先端具42付近に、先端つまみ具片44が設けられ、キャッチした物品を手元に移動しうる構成とする。
(もっと読む)
遠隔操作用作業器具
【課題】簡単な構成で主操作棒に撓みが発生するのを効果的、且つ確実に防止できる遠隔操作用作業器具を提供する。
【解決手段】固定具4と回動具5とが支持回動軸19を介して回動可能に結合された先端作業工具3と、先端部に固定具4が連結された主操作棒1と、支持回動軸19より突出した回動具5の受動片5aに先端部が回動可能に連結された補助操作棒2と、主操作棒1に操作用回動軸10を介して回動可能に支持され、操作用回動軸10より受動片5aと同一方向に突出した作動片7aに補助操作棒2の基端部が回動可能に連結されて、梃子の作用で補助操作棒2を移動させて可動具5を固定具4に対し接離する方向に回動させる操作ハンドル7と、主操作棒1と補助操作棒2の間に配置されて、一端部が主操作棒1に固定され、且つ他端部が補助操作棒2に対し移動可能に連結または保持されて主操作棒1と補助操作棒2とを略一定の間隔に保って連結する連結保持具6と、を備えている。
(もっと読む)
半導体ウエハ用真空ピンセット
【課題】半導体ウエハを安定してハンドリングでき、接触等による半導体ウエハのスクラッチや欠けを防止することができる半導体ウエハ用真空ピンセットを提供する。
【解決手段】ハンドグリップ部と、中心角が180度超360度未満の開環形状の吸着板、及び前記吸着板に配設される吸着口及び前記複数の吸着口を接続する第1真空吸引経路を有する吸着部と、角度調整機構を有し、前記ハンドグリップ部と前記吸着部とを接続する接続部と、一端が前記第1真空経路に接続され他端が半導体ウエハを吸着する真空吸引力を生成する真空圧源に接続されて、前記真空圧源の生成した前記真空吸引力を前記吸着口に伝達する第2真空吸引経路と、を有し、前記吸着板は、半導体ウエハの半径をRとした場合に、外周の大きさが0.71Rより大きく0.85R未満であり、且つ内周の大きさが0.5R以上0.61R未満であることを特徴とする半導体ウエハ用真空ピンセット。
(もっと読む)
ハンドマニプレータ
【課題】レバー部材に対する操作を停止させても掴んだ状態を継続し得ること、操作性を維持して気密性を高めること。
【解決手段】ハンドマニプレータに、トリガー状レバー部材302を引くと進出する作動棒303sと、これを進退自在に外装する、周側に貫通孔303pを開口したガイド管303gと、各貫通孔303pに挿入したクラッチボール303bと、クラッチボール303bを挿入した各貫通孔303pに対面させて配した傾斜面303tを有するクサビ面部材303wと、ガイド管303gに後退作用力を付与するバネ手段303dと、ガイド管303gを一時的に進出させる規制解除手段と、で構成する作用伝達軸307の後退動作規制手段303を付設し、支分伝達軸307dの後端と支分外装管308bの内周との間にダイヤフラム314を、ボール孔308bhの外面側に弾性シート313sを配した。
(もっと読む)
最小侵襲手術用器具及びその使用方法
【課題】本発明は、簡便な操作が可能な最小侵襲手術用器具及びその使用方法を提供する。
【解決手段】本発明の一態様によれば、最小侵襲手術用器具であって、メインシャフトと、メインシャフトの一端に配置されている第1操作シャフト及び第2操作シャフトと、メインシャフトの他端に配置されている第1動作シャフト及び第2動作シャフトと、第2操作シャフトの一端に配置されている調節ハンドルと、第2動作シャフトの一端に配置されているエンドエフェクタと、調節ハンドルのピッチ方向の動きをエンドエフェクタに伝達するためのピッチ操作部と、調節ハンドルのヨー方向の動きをエンドエフェクタに伝達するための第1ヨー操作部及び第2ヨー操作部と、ピッチ動作部と、第1ヨー動作部及び第2ヨー動作部と、ピッチケーブル、第1ヨーケーブル、及び第2ヨーケーブルとを含む器具が提供される。
(もっと読む)
動作治具
【課題】マニピュレータの先端動作部のロック状態を一時的に解除し、先端動作部を動かす。
【解決手段】マニピュレータの作業部16は、アクチュエータ部に着脱自在でモータの回転軸に接続されるプーリ50a〜50cを備える接続部15、及びプーリ50a〜50cに連動する先端動作部12を有する。動作治具400は、接続部15が接続されているときに、プーリ50a〜50cに接続される回転可能なノブ406a〜406cと、接続部15が離れているときにロッキングプレート304を板形状部308a〜308cに係合させ、接続部15が接続されているときにロッキングプレート304を板形状部308a〜308cから離間させるように、ロッキングプレート304を移動させるアライメントピン404a、404b、404cとを有する。
(もっと読む)
操作機構及び該操作機構を備える医療用器具
【課題】指が太い操作者や細い操作者であっても確実に操作することができ、汎用性の高い操作機構及び該操作機構を備える医療用器具を提供する。
【解決手段】マニピュレータのトリガーレバー32は、指を当てて引き方向及び押し方向に操作する操作機構であって、前記引き方向に操作する際に指を当てる引込部101と、前記押し方向に操作する際に指を当てる押出部102とを有する。押出部102は、中心軸に対して偏心した外形を有する軸部材106を備え、該軸部材106が回転され所定の回転位置で停止されることにより、前記引込部101と押出部102との間で指を入れる指入れ部である孔部100の距離Wを変更する。
(もっと読む)
医療用マニピュレータ
【課題】操作性を一層向上させることが可能な医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10は、エンドエフェクタであるグリッパ22を含む先端動作部14と、前記先端動作部14を操作する操作部16と、前記先端動作部14と前記操作部16とを連結する連結部12と、前記先端動作部14の姿勢を変える姿勢変更機構とを備え、前記グリッパ22の動作は、前記操作部を操作者が操作することにより伝達部材を介して機械的に操作される一方、前記姿勢変更機構の動作は、前記操作部16を操作者が操作することにより作動する屈曲用駆動源及び回転用駆動源を介して操作される。
(もっと読む)
遠隔操作用ヤットコ
【課題】 硬くて円形断面を有する被把持物を含めた種々の被把持物を遠隔操作により確実に把持できる架線工事用の遠隔操作用ヤットコを提供する。
【解決手段】 固定把持部2の中間部11に、凹状把持面20を有するサブ把持体21を、可動把持部3側に向けて進出する進出位置と、後退する後退位置との2位置のいずれかに設定できるよう進退動可能に取付け、前記サブ把持体21を前記後退位置に設定したとき、被把持物40bを固定把持部2の先端把持面4と可動把持部3の先端把持面5との間に把持でき、前記サブ把持体21を前記進出位置に設定したとき、被把持物40bを可動把持部3の中間部13とサブ把持体21の凹状把持面20との間に把持できるように構成している。
(もっと読む)
11 - 20 / 52
[ Back to top ]