
国際特許分類[B25J17/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 接続部 (479) | 手首ジョイント (167)
国際特許分類[B25J17/02]に分類される特許
71 - 80 / 167
スカラロボットの手首軸回転駆動機構
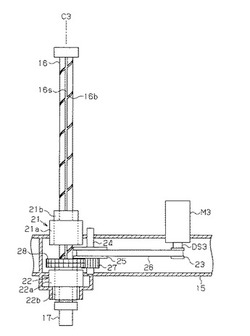
【課題】アームの質量及び慣性を低減可能として、アームとしての応答性能や位置決め精度を高く維持することのできるスカラロボットの手首軸回転駆動機構を提供する。
【解決手段】手首軸16にはそれを回転させるためのスプライン溝16sが形成されている。手首軸16の挿通されるスプラインナット22は、固定筒22aと回転筒22bからなり回転筒22bが回転されると、スプライン溝16sに嵌合されるベアリングを介して手首軸16が回転される。回転筒22bには第3モータM3の駆動力が回転動力の伝達機構により伝達される。すなわち第3モータM3からの回転動力が、基端側プーリ23からタイミングベルト26を介して先端側プーリ25に伝達され、同プーリ25に連動するピニオンギア27に噛合されるシザーズギア28から回転筒22bに伝達される。これにより、第3モータM3の正逆回転により手首軸16が正逆回転されるようになっている。
(もっと読む)
医療用マニピュレータ及び実験装置

【課題】可撓性部材の張力を簡便且つ適切に判断する。
【解決手段】医療用マニピュレータ10は、モータ40a〜40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a〜40cに接続されるプーリ50a〜50cを備える接続部15と、接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a〜54cを介してプーリ50a〜50cに連動する先端動作部12と、ワイヤ54a〜54cの途中に介装され、歪みゲージ404aが設けられた張力検出片400とを有する。張力検出片400は、連結シャフト48の延在方向に長尺な板体であり、長尺方向両端部にワイヤ54a〜54cをかけるフック406を有する。
(もっと読む)
ロボットハンド装置
【課題】ワーク置き場にワークを置く際に、ワークが受ける衝撃を小さくすることができ、かつ電気的構成が簡単なロボットハンド装置を提供することを課題とする。
【解決手段】ロボットハンド装置1は、アーム部2とハンド部3とワーク置き場4とを備えており、ワークWを所定の場所からワーク置き場4まで搬送する搬送モードと、ワークWを解放しワーク置き場4に置く載置モードと、に切り替え可能である。ロボットハンド装置1は、アーム部2、ハンド部3、ワーク置き場4、ワークWのうち、少なくとも一つを導通経路とする電気回路50を備えている。載置モードにおいては、ハンド部3に把持されたワークWがワーク置き場4に既に置かれているワークWに接触することにより、電気回路50が導通し、電気回路50の導通をトリガーとして、ハンド部3がワークWを解放する。
(もっと読む)
張力検査装置
【課題】可撓性部材の張力を簡便且つ正確に検査する。
【解決手段】医療用マニピュレータ10は、連結シャフト48の一方の側に設けられたモータ40a〜40cの回転軸から、所定張力で張られたワイヤ54a〜54cを介して、連結シャフト48の他方の側に設けられた先端動作部12を動作させる。連結シャフト48の側面には開閉可能な検査孔404が設けられている。張力検査装置400は、ワイヤ54a〜54cを順に自動的にはじいて振動させる爪部412a〜412cと、ワイヤ54a〜54cの振動を検出するマイクロホン414と、マイクロホン414によって検出された振動から求められる張力Tが適正範囲であるか否かを判断して所定の出力をする張力判断部434とを有する。
(もっと読む)
フレキシブルリスト型エレメント及びその製造と使用方法
フレキシブルリスト型エレメント及びその操作方法に関し、角度をなすように可動であるハブハウジングと、ハウジング内で入力機構を介して可動である1つ又は複数の自在型継手及び/又は他のフレキシブル軸接手を有するドライブトレーンを介して駆動される回動可能で操作可能なエンドエフェクタと、を備える。  (もっと読む)
(もっと読む)
パラレルメカニズム
【課題】 パラレルメカニズムの動作速度を低下させることなく、エンドエフェクタの動作範囲を拡大することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた電動モータ21に一端が接続され、他端がブラケット14に回転可能に支持され、電動モータ21によって回転駆動される旋回軸20と、該旋回軸20の他端に取り付けられ、旋回軸20の回転運動をベース部2の取付面2aに対して垂直な方向への直線運動に変換するエンドエフェクタ駆動機構30とを備える。エンドエフェクタ駆動機構30は、旋回軸20の他端に取り付けられたウォーム41と、該ウォーム41と噛合する一対のウォームホイール42,43と、該一対のウォームホイール42,43それぞれの軸部に連結され、ウォームホイール42,43の回転運動を直線運動に変換する閉リンク44とを有する。
(もっと読む)
機械的インピーダンスの調節装置とその制御方法、該機械的インピーダンスの調節装置を用いた立ち上がり補助椅子および揺動アーム
【課題】ロボット等の機械装置において、可動部分の機械的インピーダンスを調節することの出来る、従来に無い機械的インピーダンスの調節装置とその制御方法、該機械的インピーダンスの調節装置を用いた立ち上がり補助椅子および揺動アームを提供すること。
【解決手段】駆動源22の駆動力を駆動部材14に伝達する動力伝達経路20上に、誘電体エラストマーによって形成された誘電膜30の両面に電極層32a,32bを形成した誘電体素子26を配設し、該電極層32a,32bへの印加電圧を調節することによって機械的インピーダンスを調節出来るようにした。
(もっと読む)
パラレルメカニズム
【課題】 旋回軸に設けられている自在継手の磨耗を低減することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた電動モータ21に一端が接続され、他端がエンドエフェクタ部13に接続され、電動モータ21の駆動力をエンドエフェクタ部13に伝達する旋回軸ロッド20を備える。旋回軸ロッド20は、その両端に、一対のヨーク24,25を十字軸26により連結したユニバーサルジョイント22,23を有する。十字軸26は、3本のピン27,28,29と、これらのピン27,28,29が十字状に嵌挿されるピン孔が形成されたコマ30を有し、十字軸26に加わるスラスト荷重を受けるスラストベアリング33,34が、ヨーク24,25とコマ30との間に挿入されている。
(もっと読む)
物体入れ換え装置および物体移動装置
【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
被挿入物の把持・挿入装置および被挿入物の把持・挿入方法
【課題】 被挿入物を挿入孔に軸心を揃えて挿入するに際して、種々の大きさの被挿入物に対応することができ、簡単な構造により、短時間に、作業能率よく挿入することができる被挿入物の把持・挿入装置を提供する。
【解決手段】 被挿入物を把持して挿入孔に軸心を揃えて挿入するために使用される被挿入物の把持・挿入装置60が、3本以上の把持指65を有し、これらの把持指65は、円周方向に間隔を置いて配置されて、放射方向に進退可能にされ、把持指65の内側面は、被挿入物を把持する把持面とされ、把持指65の外側面は、少なくともその先端部に先端に行くに従い内方に向かうテーパが付されて、挿入孔の入口に接触可能にされ、被挿入物把持・挿入装置60の位置を挿入孔の位置にならわせて修正するならい機構を備えている。
(もっと読む)
71 - 80 / 167
[ Back to top ]