
国際特許分類[B25J3/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 主従形マニプレータ,すなわち制御ユニットと制御されるユニットの両者が対応する空間的運動をするもの (280)
国際特許分類[B25J3/00]の下位に属する分類
主部と従部を平行四辺形で接続するものを含む (1)
サーボ機構を含むもの (1)
国際特許分類[B25J3/00]に分類される特許
101 - 110 / 278
作業機械の操作支援装置
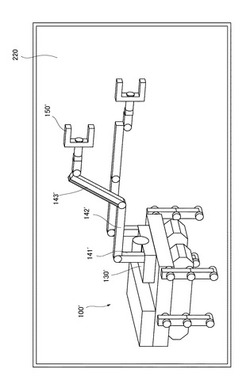
【課題】アクチュエータの駆動によって直接的に作動している部位をオペレータが確実に把握できるようにすることで、誤操作を生じにくくする作業機械の操作支援装置を提供する。
【解決手段】動作させる部材に対応付けられた部材の画像143´を、実際の部材の相対位置関係に近似させて画像表示させるための画像表示部220を備え、部材のうちアクチュエータの駆動によって直接的に作動している部材を特定するとともに、特定された部材に対応する部材の画像143´を、他の部位の画像130´,141´,142´,150´と識別可能に画像表示部220に表示させるようにした。
(もっと読む)
ロボットの動作を制御する方法およびロボットシステム

【課題】ロボットの動作を制御する方法およびロボットシステムにおいて、人間の手とは異なる構造を有するロボットに対し、人間の手のようなリアルタイムの動作の制御を行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示情報取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手指の関節および指先の位置を表す手指座標を決定し(手指座標決定ステップ、ステップS3)、この手指座標に基づいて、ロボットハンドの各関節の角度を算出する(ロボットハンド関節角度算出ステップ、ステップS4)。
(もっと読む)
ロボット装置及びその制御方法
【課題】操作性を向上させたロボット装置及びその制御方法を提供すること。
【解決手段】ロボット装置10は、移動可能な台車部1と、台車部1に回動可能に連結されたロボットアーム2と、ロボットアーム2及び/又は台車部1を操作するための操作情報を入力する操作手段と、操作手段を台車部1に相対移動が可能となるように接続する接続手段と、操作手段の相対位置を検出する位置検出手段と、台車部に設けられ、操作手段からの操作情報と、位置検出手段により検出された操作手段の相対位置とに基づいて、ロボットアーム2及び/又は台車部1の駆動を制御する制御手段と、を備えている。
(もっと読む)
低侵襲外科システムにおいて手の存在を検出するための方法およびシステム
低侵襲手術システムにおいて、ハンド追跡システムは、ヒトの手の一部に装着されたセンサ素子のロケーションを追跡する。システム制御パラメータは、ヒトの手の一部のロケーションに基づいて生成される。低侵襲手術システムの操作は、システム制御パラメータを使用して制御される。したがって、本低侵襲手術システムは、ハンド追跡システムを含む。ハンド追跡システムは、ヒトの手の一部のロケーションを追跡する。ハンド追跡システムに連結されたコントローラは、該ロケーションをシステム制御パラメータに変換し、システム制御パラメータに基づいて、コマンドを低侵襲手術システムに投入する。  (もっと読む)
(もっと読む)
遠隔操作される低侵襲スレーブ手術器具の手による制御のための方法およびシステム
低侵襲手術システムにおいて、ハンド追跡システムは、ヒトの手の一部に装着されたセンサ素子のロケーションを追跡する。システム制御パラメータは、ヒトの手の一部のロケーションに基づいて生成される。低侵襲手術システムの操作は、システム制御パラメータを使用して制御される。したがって、本低侵襲手術システムは、ハンド追跡システムを含む。ハンド追跡システムは、ヒトの手の一部のロケーションを追跡する。ハンド追跡システムに連結されたコントローラは、該ロケーションをシステム制御パラメータに変換し、システム制御パラメータに基づいて、コマンドを低侵襲手術システムに投入する。  (もっと読む)
(もっと読む)
冗長な閉鎖機構を有するエンドエフェクタ
冗長閉鎖機構を有するエンドエフェクタ、ならびに関連するツールおよび方法を開示する。開示されるエンドエフェクタは、低侵襲手術に使用される場合に特に有益であり得る。例示的な手術ツールは、近位端および遠位端を有する細長いシャフトと、シャフトの遠位端に配置されるツール本体と、クランプ構成と開放構成との間でツール本体に対して可動なジョーと、ジョーに連結され、クランプ構成と開放構成との間でツール本体に対するジョーの位置を変化させるように操作可能な第1の作動機構と、ジョーに連結される第2の作動機構とを備える。第2の作動機構は、ジョーがクランプ構成に保持される第1の構成と、ツール本体に対するジョーの位置が、第2の作動機構によって制約されない第2の構成とを有する。  (もっと読む)
(もっと読む)
ハンドガイド装置とその制御方法
【課題】単純作業はロボットに任せ、人の判断や経験を必要とする作業時のみ、人がロボットを操作して、組立ライン上を移動する作業対象物にワークを組付けることができるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア4a内で移動可能なロボット16と、ハンドのワーク把持装置近傍に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
平行アームを持つロボットあるいは触覚インターフェース構造体
本発明は6自由度を有すると共にベース(2)と二つの平行なアーム(B,B')とリストジョイント(P)とを有するロボットまたは触覚インターフェース構造体に関し、アーム(B,B')はベース(2)とリストジョイント(P)との間に回動可能に設けられ、アーム(B,B')は、ショルダージョイント(3,3')とアーム(4,4')とリストジョイント(P)を支持する前腕(6,6')とを具備し、リストジョイント(P)は、それに対してハンドルホルダー(18)が第1の回転軸線(X)を中心として連結される連結セグメント(24)と、第2の回転軸線(Z)を中心としてハンドルホルダー(18)に回動可能に連結されたハンドル(16)であって、第1の軸線(X)、第2の軸線(Z)および第3の軸線(Y)を中心として回動可能なハンドル(16)とを備え、連結セグメント(24)の回転に対する少なくとも第1の回転軸線(X)を中心とするリストジョイント(16)の回転を低速化する手段が連結セグメント(24)に対して、さらにヒンジ結合されている。  (もっと読む)
(もっと読む)
医療用マニピュレータ
【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80a及びロッド82aと、連結シャフト18の一端側に設けられ、ワイヤ80a及びロッド82aを軸線方向に進退駆動するプーリ70a及びトリガレバー36と、連結シャフト18の他端側に設けられ、ワイヤ80a及びロッド82aの進退駆動によって動作される先端動作部12と、ワイヤ80a及びロッド82aがそれぞれ摺動可能に挿通される複数の孔部110a〜110fが形成され、連結シャフト18の内面に対して密着配置されることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備え、スリット124が形成された孔部の摺動部118と、スリット124が形成されていない孔部の摺動部112は、ワイヤ80a及びロッド82aの摺動方向での位置がずれている。
(もっと読む)
医療用マニピュレータ
【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80a及びロッド82aと、連結シャフト18の一端側に設けられ、ワイヤ80a及びロッド82aを軸線方向に進退駆動するプーリ70a及びトリガレバー36と、連結シャフト18の他端側に設けられ、ワイヤ80a及びロッド82aの進退駆動によって動作される先端動作部12と、ワイヤ80a及びロッド82aがそれぞれ摺動可能に挿通される複数の孔部110a〜110fが形成され、連結シャフト18の内面に対して密着配置されることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備え、複数の孔部110a〜110fのうち、少なくとも一部の孔部110a、110bの近傍には、ガイドパイプ116が配置されている。
(もっと読む)
101 - 110 / 278
[ Back to top ]