
国際特許分類[B25J3/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 主従形マニプレータ,すなわち制御ユニットと制御されるユニットの両者が対応する空間的運動をするもの (280)
国際特許分類[B25J3/00]の下位に属する分類
主部と従部を平行四辺形で接続するものを含む (1)
サーボ機構を含むもの (1)
国際特許分類[B25J3/00]に分類される特許
61 - 70 / 278
マスタ操作入力装置及びマスタスレーブマニピュレータ
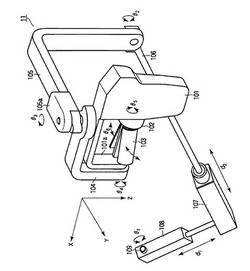
【課題】より直感的な操作を可能として操作性を向上したマスタ操作入力装置及びそのようなマスタ操作入力装置を有するマスタスレーブマニピュレータを提供すること。
【解決手段】操作者によって把持された状態で位置及び姿勢を変化自在であって、位置及び姿勢の変化に応じて、スレーブマニピュレータの遠位端の関節の位置及び姿勢の指令値を与えるように構成された把持部101に、スレーブマニピュレータの遠位端の関節と同一の構造を有し、手動操作を受けてスレーブマニピュレータの遠位端の関節を駆動するための駆動量の指令値を与えるように構成された第1ロール関節102を設ける。さらに、第1ロール関節102にスレーブマニピュレータの遠位端の関節に設けられた先端効果器を設けるための関節を設ける。
(もっと読む)
力ベクトル伝達装置および方法

【課題】 力ベクトルを人の指に伝達する力ベクトル伝達装置を提供する。
【解決手段】 力ベクトル伝達装置は堅固な材質から形成される外形と、挿入されるオブジェクトを取り囲むように伸縮性のある材質から形成される内壁と、内壁と外形との間に位置し、内壁を介してオブジェクトに力を伝達するアクチュエータから構成され、ロボットの指の先端に作用する様々な方向の力を人の指の先端にそのまま伝達することができる。
(もっと読む)
マスタ・スレーブ型ロボット操作システム
【課題】安価で操作性に優れたマスタ・スレーブ型ロボット操作システムを提供する。
【解決手段】マスタ・スレーブ型ロボット操作システムは、操作者によって操作されるマスタ操作装置10と、遠隔操作されるスレーブロボット装置と、マスタ操作装置とスレーブロボット装置との間で両装置の状態情報を双方向通信する情報通信手段30とを備える。スレーブロボット装置は、任意の姿勢又は動作を実現するために複数のアクチュエータを備えている。マスタ操作装置10は、スレーブロボット装置が備える構造に対応する構造を備えることでスレーブロボット装置が取り得る任意の姿勢又は動作と同様の姿勢又は動作を実現可能であり、且つ、スレーブロボット装置に設置された複数のアクチュエータに対応した複数のアクチュエータ13a〜13hを備えている。
(もっと読む)
力を指示するトリガー機構を用いた触覚インターフェースハンドル
【課題】マスタ・スレーブロボットシステムにおいて、動作及び/又は触覚フィードバックに関して、ユーザーにとって直感的な操作性を提供すること。
【解決手段】スレーブ装置のテレマティクスによる制御のための方法及びシステムは、細長い本体を有するハンドグリップを含む。ハンドコントローラー式の制御インターフェースを含む。一つ以上のセンサーが、ハンドグリップに配置されるトリガーの物理的な変位を感知するために提供される。アクチュエーター又はモーターは、ハンドグリップの中に配置され、トリガーによって当該ハンドコントロールインターフェースのユーザーに適用される力を動的に制御するための、制御システムからの制御信号に応答する。
(もっと読む)
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
制御装置、ロボット、制御方法、ならびに、プログラム
【課題】複数の関節を有する制御対象の表面に対するユーザの操作によって制御対象の形状を適切に変化させる制御装置等を提供する。
【解決手段】制御装置101において、回転角取得部102は、操作対象が有する棒状体の関節の回転角qを取得する。接触角取得部103は、棒状体の周囲に設置された接触位置センサの出力から接触角sを取得する。和計算部104は、回転角qと接触角sの和(q+s)を計算する。出力部105は、和(q+s)がいずれの角度範囲に属するか、に応じて、棒状体の関節の屈曲角や振上角を増減させる制御信号を出力する。
(もっと読む)
マスタ・スレーブ方式マニピュレータの制御装置及びその制御方法
【課題】マスタマニピュレータの操作対象のスレーブマニピュレータを、切替操作により他のスレーブマニピュレータに切り替えた場合に、当該マスタマニピュレータの姿勢を、新たな操作対象のスレーブマニピュレータの姿勢に合わせる処理を効率的に行うマスタ・スレーブ方式マニピュレータの制御装置及び制御方法を提供すること。
【解決手段】マスタ・スレーブ方式マニピュレータの制御装置を次のように構成する。マスタマニピュレータに操作者3の手が位置しているか否かを検出する接触センサ311R,311Lと、接触センサ331R,331Lによって、マスタマニピュレータに操作者3の手が位置していないことが検出された場合に、マスタマニピュレータの姿勢を、スレーブマニピュレータの姿勢に合わせるように、マスタマニピュレータを移動させる制御を行うマスタ制御回路300と、を具備させる。
(もっと読む)
ロボットを制御するためのヒューマン・ロボット・インターフェース装置及び方法
【課題】人型ロボットを容易に操作できる遠隔装置を提供すること。
【解決手段】表示装置に、2次元画像と物体認識サポート・ツール・ライブラリと行動サポート・ツール・ライブラリを表示することを含んでいる。対象物体を表現する選択物体画像を受信し、選択物体画像を複数の登録物体形状パターンと比較し、さらに、その対象物体がヒューマン・ロボット・インターフェースに登録されている場合、対象物体に関連する登録物体形状パターンを自動的に認識することを含んでいる。登録物体形状パターンは、表示装置上に表示され、行動サポート・ツール・ライブラリから選択された選択物体操作パターンが受信される。制御信号をヒューマン・ロボット・インターフェースからロボットに送信することができる。
(もっと読む)
操作機構
【課題】 可動部の可動範囲が広く、可動部をスムーズな動きで精度良く操作することができる操作機構を提供する。
【解決手段】 操作機構1は、3組以上のリンク機構11Aを介して、固定部材4に対し入力部材15Aを姿勢変更可能に連結した入力側リンク作動装置2Aと、3組以上のリンク機構11Bを介して、固定部材4に対し出力部材15Bを姿勢変更可能に連結した出力側リンク作動装置2Bとを備える。リンク機構11A,11Bは、固定側の端部リンク部材1aと、入力側または出力側の端部リンク部材1cと、これら両端部リンク部材1a,1cを連結した中央リンク部材1bとでなる。入力側リンク機構11Aの固定側の端部リンク部材11aの回転を出力側リンク機構11Bの固定側リンク部材11aに伝達する回転伝達機構5を2組以上設ける。
(もっと読む)
投影面情報提示装置と方法
【課題】ロボットハンドと対象物との相対位置誤差を拡大表示することができ、これにより目視かつ手動操作によりロボットハンドを対象物に対して正確に位置決めすることができる投影面情報提示装置と方法を提供する。
【解決手段】 ロボットハンド12に設けられたプロジェクタ22により、原パターンAを対象物2に固定された投射面3上に投射し(S1)、ロボットハンド12に設けられたカメラ24により、投射された原パターンである投射パターンBを撮影し(S2)、撮影した投射パターンである撮影パターンCを、ロボットハンド12が対象物2に対し予め設定した位置と姿勢をとる基準位置において、原パターンAと一致するように変形し(S3)、変形した変形パターンDを原パターンAに重畳する(S5)。(S1)〜(S5)を順に繰り返す。
(もっと読む)
61 - 70 / 278
[ Back to top ]