
国際特許分類[B25J3/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 主従形マニプレータ,すなわち制御ユニットと制御されるユニットの両者が対応する空間的運動をするもの (280)
国際特許分類[B25J3/00]の下位に属する分類
主部と従部を平行四辺形で接続するものを含む (1)
サーボ機構を含むもの (1)
国際特許分類[B25J3/00]に分類される特許
81 - 90 / 278
身体補助ロボット装置及びシステム
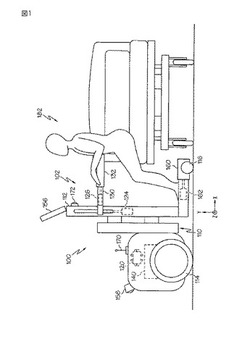
【課題】座、起立、及び歩行が制限された状態の人々に対して移動性を提供する身体補助ロボット装置及びシステムを提供する。
【解決手段】直立支持部材112を含むフレーム110と、直立支持部材と摺動可能に係合した横方向部材130と、横方向部材と摺動可能に係合したハンドル132と、直立支持部材及び横方向部材に結合した上昇アクチュエータ124と、横方向部材及びハンドルに結合した横方向アクチュエータ126と、を包含可能である。上昇アクチュエータが横方向部材を並進させると共に横方向アクチュエータがハンドルを並進させることにより、ユーザーを起立位置と非起立位置の間において移動させる構成とする。
(もっと読む)
ロボットアーム操作システムおよびその操作方法

【課題】ロボットアームの操作に当たり、安全、確実かつ容易に障害物を回避する。
【解決手段】ロボットアーム操作システムは、リアルタイムで受信した操縦指令値に基づいてロボットアーム2を操縦する遠隔操縦部1と、障害物の3次元形状モデルを含む環境データを保存する環境データ保存部4と、障害物との距離が近いほど斥力ベクトルが大きくなるように仮想的な斥力ベクトル場を設定する斥力ベクトル場生成処理部5と、斥力ベクトル場を利用してロボットアームに対して障害物から遠ざかる方向への仮想的な斥力を算出する仮想力生成処理部6と、仮想力生成処理部6により算出された仮想的な斥力と遠隔操縦部1からの操縦指令値とを組み合わせてロボットアームへの動作指令値を生成するロボットコントローラ3と、を有する。
(もっと読む)
マニピュレータ及びマニピュレータの制御方法
【課題】本発明は、小型な駆動部を有するマニピュレータを、または複数の構造物が存在する狭隘部へマニピュレータを挿入にできるマニピュレータの制御方法を提供することである。
【解決手段】本発明は、上記目的を達成するために、少なくとも一つの駆動部と、前記駆動部に接続する少なくとも一つのリンクとを備えるマニピュレータの前記駆動部の姿勢角を検出し、前記姿勢角から前記マニピュレータの手先の位置および姿勢を算出するマニピュレータまたはマニピュレータの制御方法において、前記姿勢角の検出は前記リンクの駆動軸またはその延長線が前記姿勢検出器の検出軸とが一致するように設けられた前記姿勢検出器によって行なうことを第1の特徴とする。
(もっと読む)
ロボットの遠隔操作システム
【課題】連続的に作業指示を行うことができるロボットの遠隔操作システムを提供する。
【解決手段】本発明のロボットの遠隔操作システム1(1000)は、第1の撮像手段110(410)と、作業指示手段120(420)と、ロボット200と、を備える。作業指示手段は、第1の撮像手段の位置情報、作業対象物が含まれるように撮像された画像情報、作業対象物に対して実行させる作業指示情報をロボットに送信する。ロボットは、作業指示手段から受信した第1の撮像手段の位置情報に基づいて移動し、周辺情報取得手段250、260でロボットの周辺の情報を取得し、取得した周辺情報と作業指示手段から受信した画像情報との照合結果から作業対象物の位置情報を取得し、取得した位置情報に基づいて作業対象物に近づき、作業指示手段から受信した作業指示情報に基づく作業を作業対象物に対して実行する。
(もっと読む)
向上した巧緻性および感度で最低侵襲性外科手術を行うための連結外科手術器具
【課題】最低侵襲性外科手術のための連結外科手術用器具を提供すること。
【解決手段】本発明は、最低侵襲性外科手術手順の動作を向上させる連結外科手術用器具(12)である。器具(12)は、高度の巧緻性、低い摩擦、低い慣性、および良好な力反映を有する。独特なケーブルおよびプーリー駆動システムにより、摩擦が減少し力反映が向上する。独特なリスト機構により、標準的な腹腔鏡器具(12)に比べて外科手術の巧緻性が向上する。システムを最適化することにより、必要なアクチュエータ数が減少し、これにより最小サイズで十分に機能的な連結外科手術用器具が製造される。
(もっと読む)
多構成テレプレゼンスシステムおよびその方法
【課題】新規な改良型遠隔ロボットシステムを提供する。
【解決手段】無菌フィールド内で処置手順を実施するためのロボット外科手術システムであって、外科手術機材と、近位端部および遠位端部を有するマニピュレータアームを含むマニピュレータアッセンブリと、少なくともマニピュレータアームを覆い、無菌フィールドからマニピュレータアームを遮断する無菌ドレープと、該マニピュレータアームの遠位端部を外科手術機材と連結させ、マニピュレータアッセンブリからこの機材まで、少なくとも2次の運動を伝送するためのアダプタと、上記機材を収容し、患者体内で経皮貫入による接近を提供するための内側管腔を規定するカニューレと、上記ドレープを通して延び、かつ、カニューレをマニピュレータアームの遠位端部に連結する滅菌可能カニューレアダプタとを備える。
(もっと読む)
遠隔操作装置
【課題】操作者が、マニピュレータの出力動作を容易に連想及び体感しながら入力動作を行うことができる遠隔操作装置を提供すること。
【解決手段】重力方向に対する姿勢及び回動動作が入力される第一入力部10と、第一入力部10に対して回転可能に接続されて、重力方向に対する姿勢及び第一入力部10に対する回転動作が入力される第二入力部11と、第一入力部10又は第二入力部11に対して移動可能に接続されて、第一入力部10又は第二入力部11に対する移動動作が入力される第三入力部12と、入力動作を第一入力部10又は第二入力部11の何れか一方に規制する入力切換スイッチ(入力切換部)13と、加速度センサ(加速度検出部)15と、入力動作を腕部に対する手先部の回動方向及び回動角度に変換し、入力動作を手先部の移動方向及び移動距離に変換し、並びに、入力動作を把持部の開閉量に変換する制御部17と、を備えている。
(もっと読む)
移動体遠隔操作システム、環境情報収集システム
【課題】直進運動と回転運動についてのバイラテラル制御を正確に行うことが可能な移動体遠隔操作システム等を提供すること。
【解決手段】人が操作を行う操作デバイスを有する操作システムと、前記操作システムに対してなされた人の操作に基づいて駆動される移動体システムと、を備え、前記操作デバイスには、前記移動体システムが環境から受けた反力を再現するためのアクチュエータが取り付けられ、前記操作システムと前記移動体システムとの間でバイラテラル制御が行われる移動体遠隔操作システムであって、前記操作デバイスには、直進運動指示と回転運動指示の双方を含む操作が可能となっており、前記バイラテラル制御の少なくとも一部において、直進運動と回転運動のそれぞれについて独立した演算を行うことを特徴とする、移動体遠隔操作システム。
(もっと読む)
マスタスレーブシステム及びその制御方法
【課題】比較的小出力のマスタロボットを操作者が操ることによって、少なくとも電気的に接続された比較的大出力のスレーブロボットを操縦するマスタスレーブシステムにおいて、操作者に、まるでスレーブロボットを直接持っているかのような直感的な操縦を可能とせしめ、なおかつスレーブロボット側に力センサを必要としないマスタスレーブシステムの提供。
【解決手段】バイラテラル制御されるマスタスレーブシステムであって、マスタロボットをアドミッタンス型の力覚提示装置とし、マスタロボットの変位を検出するマスタ変位センサと、スレーブロボットの変位を検出するスレーブ変位センサと、マスタロボットを駆動するマスタアクチュエータと、スレーブロボットを駆動するスレーブアクチュエータと、操作者がマスタロボットに加える操作力を検出する操作力センサと、からなるものとする。
(もっと読む)
輻輳した環境におけるロボット型機械の操縦を支援する方法及びシステム
物体がカメラの視野に侵入し、且つ、これにより、操作者の視野を見にくくした場合にも、作業シーンの適切な画像をリアルタイムで操作者に提供する、第2ロボット型移動可能機械の制御下において輻輳した作業環境内において運動する第1ロボット型移動可能機械の操縦を支援する方法である。この方法は、制約解決タイプの物理エンジンの特性の使用に基づいている。シーン内のそれぞれの物体ごとに、物理エンジンは、メッシュの形態の前記物体の物理的表現を有する。エンジンは、2つの物体の個々の位置及び速度に基づいて捩れを算出する。マニピュレータとシーン内の固定物体との間の衝突の場合に、エンジンは、マニピュレータが物体を打撃する代わりに物体を回避するように、マニピュレータに適用されるべき捩れを判定する。  (もっと読む)
(もっと読む)
81 - 90 / 278
[ Back to top ]