
国際特許分類[B25J3/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 主従形マニプレータ,すなわち制御ユニットと制御されるユニットの両者が対応する空間的運動をするもの (280)
国際特許分類[B25J3/00]の下位に属する分類
主部と従部を平行四辺形で接続するものを含む (1)
サーボ機構を含むもの (1)
国際特許分類[B25J3/00]に分類される特許
51 - 60 / 278
歩行補助装置
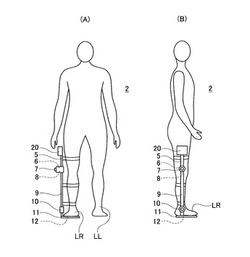
【課題】スムースに歩行動作を補助する歩行補助装置を提供する。
【解決手段】歩行補助装置2は、大腿リンク5と下腿リンク9とコントローラ20を備えている。大腿リンク5と下腿リンク9は相互に揺動可能に連結されており、それぞれユーザの大腿と下腿に装着される。コントローラ20は、ユーザの歩幅から下腿リンクの最大揺動角Ag_maxと遊脚時間Tswingを定め、それらに基づいて遊脚軌道を決定する。そして、コントローラ20は、下腿リンクの揺動角が遊脚起動に追従するように下腿リンク9を制御する。ここで、遊脚軌道は、下腿リンクの目標揺動角が予め定められた初期角度Ag_sから単調増加し、最大揺動角Ag_maxへ達した後に単調減少して終端角度Ag_eまで、遊脚時間Tswingをかけて変化する曲線を描く。
(もっと読む)
ハンドガイド装置とその制御方法

【課題】ライン上を移動する作業対象物に対するワークの相対的な姿勢調整を不要にすることができ、人がロボットを操作して並進操作のみを行うことにより、作業対象物に対するワークの位置合わせを行い、作業対象物にワークの組付けを行うことができるハンドガイド装置とその制御方法を提供する。
【解決手段】ライン1上を移動する作業対象物2に対してハンドを操作するハンドガイド装置10であって、ワークを把持するハンド14と、ハンドをロボットエリア内で移動可能なロボット16と、ロボットの作動を操作するハンドガイド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ハンド14の姿勢、もしくは姿勢及び位置をライン1の姿勢に合わせて自動補正するラインキャリブレーション機能を有する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行アシストにおいて、より適切な省エネ制御を行う。
【解決手段】歩行アシスト装置1は、目的地までの全歩行経路を取得し、歩行距離を元に通常のアシストを行った場合に必要な電力量を求める。そして、バッテリ18の残量が目的地に到達するまでの歩行アシストに足りない場合、地面から離れている遊脚のアシスト力を低減してバッテリの消費を低減し、目的地までアシストを継続する。装着者Mの負担が小さいのは、坂道を下るときであり、また、遊脚と立脚では、遊脚のアシスト力を低減した場合の方が装着者Mの負担が小さいと考えられる。そこで、下り遊脚、平地遊脚、下り立脚、平地立脚の順にアシスト力の低減を行うことで、目的地までバッテリが足りるアシスト方法を選択し、実行する。
(もっと読む)
脚補助装置
【課題】 簡単な構造で実用的に使用できる脚補助装置を提供する。
【解決手段】 脚補助装置1は、装着者Pに装着する装着部2と、装着者Pの左右の足をそれぞれ支持する左右の足部3と、装着部2と左右の足部3とをそれぞれ連結する左右のエアシリンダ5と、左右のエアシリンダ5内の圧力をそれぞれ調節する左右の圧力調節部7と、左右の圧力調節部7を作動させる左右のスイッチ8と、を有することを特徴とする。
(もっと読む)
向上した巧緻性および感度で最低侵襲性外科手術を行うための力反映外科手術器具および位置決め機構
【課題】遠隔操作者システム制御下での人体組織の保持・操作する手段を提供する。
【解決手段】患者に固定されるための基部;基部に装着され、支持部材を備える位置決め機構14であって、支持部材は、基部に対して複数の自由度で作動する位置決め機構;支持部材に着脱可能に結合された細長部材にエンドエフェクタを結合させるリスト機構を備える外科手術器具12であって、エンドエフェクタは支持部材に複数の自由度で作動し、かつ、外科手術器具が患者に挿入されてエンドエフェクタを外科的作業部位に隣接した位置に置くように適合されている外科手術器具;ならびに位置決め機構および外科手術器具に結合されたマスターデバイス150であって、マスターデバイスは、位置決め機構およびエンドエフェクタの動きを制御し、かつ、力フィードバック情報を外科手術器具から複数の自由度で受け取る、マスターデバイスを備える、外科手術システム10。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
ロボットシステム
【課題】少ない時間で操作を習得することができる、直感的なロボットの遠隔操作インタフェースを提供する。
【解決手段】ロボットの操作装置が、カメラから取り込まれたカメラ映像が表示されるタッチスクリーンと、カメラ映像からロボットの3次元的な位置及び姿勢を認識するロボット認識部と、ロボット認識部で認識した位置及び姿勢とからロボットのCG映像を生成し、CG映像をタッチスクリーン上のロボットのカメラ映像に重畳表示するCG合成部と、ユーザのタッチ操作に応じて、タッチスクリーン上でCG映像のロボットを仮想的に動作させる操作入力部と、CG映像のロボットの仮想的な動作に追従してロボットが動作するように、ロボットに対して制御命令を送出するロボット制御部と、を有している。
(もっと読む)
膝関節運動補助装置
【課題】膝関節運動補助装置を円滑に動作させる。
【解決手段】本発明の膝関節運動補助装置は、上腿部に装着される上腿装着部と、下腿部に装着される下腿装着部と、上記上腿装着部及び下腿装着部の膝関節側端部間を回転可能に連結する連結部と、この連結部を中心にして上記上腿装着部と下腿装着部とを相対的に回転運動させながら上記膝関節側端部間を前後方向に相対的にスライド運動させる駆動部とを備えた膝関節運動補助装置において、上記駆動部が、周縁カムと、この周縁カムの外周縁に配置される駆動歯車と、当該周縁カムの内周面に形成されるカム溝と、当該カム溝と係合するカムフォロアと、を有し、この周縁カムとカムフォロア及び駆動歯車とが上記上腿装着部及び下腿装着部の一方と他方に夫々取り付けられ、上記周縁カムの外周縁には、上記駆動歯車が係合する歯列が形成され、上記駆動歯車の回転により上記周縁カムと上記カムフォロアとが回転すると上記回転運動及びスライド運動が生じるようにした。
(もっと読む)
マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータであっても逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置10の操作部11に、スレーブアーム31の冗長関節の駆動量を操作者が指令するための操作部材としての第1ロール関節102を設ける。スレーブアーム31が冗長関節を有していない場合には、スレーブアーム31の全体としての逆運動学を解くことによって各関節の駆動量を求める。また、スレーブアーム31が冗長関節を有している場合には、先端の冗長関節202がないものとして逆運動学を解くことによって冗長関節202以外の関節の駆動量を求める。冗長関節202についてはマスタ操作入力装置10からの指令値に対応した駆動量とする。
(もっと読む)
パワーアシスト装置
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
51 - 60 / 278
[ Back to top ]