
国際特許分類[B25J3/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 主従形マニプレータ,すなわち制御ユニットと制御されるユニットの両者が対応する空間的運動をするもの (280)
国際特許分類[B25J3/00]の下位に属する分類
主部と従部を平行四辺形で接続するものを含む (1)
サーボ機構を含むもの (1)
国際特許分類[B25J3/00]に分類される特許
71 - 80 / 278
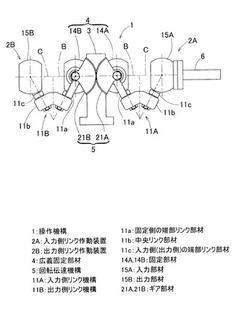
操作機構
【課題】 可動部の可動範囲が広く、可動部をスムーズな動きで精度良く操作することができる操作機構を提供する。
【解決手段】 操作機構1は、3組以上のリンク機構11Aを介して、固定部材4に対し入力部材15Aを姿勢変更可能に連結した入力側リンク作動装置2Aと、3組以上のリンク機構11Bを介して、固定部材4に対し出力部材15Bを姿勢変更可能に連結した出力側リンク作動装置2Bとを備える。リンク機構11A,11Bは、固定側の端部リンク部材1aと、入力側または出力側の端部リンク部材1cと、これら両端部リンク部材1a,1cを連結した中央リンク部材1bとでなる。入力側リンク機構11Aの固定側の端部リンク部材11aの回転を出力側リンク機構11Bの固定側リンク部材11aに伝達する回転伝達機構5を2組以上設ける。
(もっと読む)
5軸を有する力覚提示マニピュレータ

【課題】エンドエフェクタがマニピュレータのベースに対して、3自由度の並進運動および2自由度の回転動作を出力可能であり、小型で、広い範囲の回転動作が可能な力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベース10と、エンドエフェクタ60と、エンドエフェクタ60を支持する3本のアーム20a、20b、20cと、エンドエフェクタ60と3本のアーム20a、20b、20cを連結する3本の連結リンク23a、23b、23cと、3本のアーム20a、20b、20cを駆動する駆動手段と、を備える冗長パラレルメカニズムを用いた構成となっている。
(もっと読む)
ロボット制御パラメータ決定装置及び方法、ロボットの制御装置、ロボット装置、ロボット制御パラメータ決定プログラム、ロボット制御パラメータ決定用集積電子回路
【課題】人とロボットの操作部との接触領域の特徴量に応じてロボットの制御パラメータ値を変える。これにより、早く動かしやすいロボットの制御と、ゆっくり(又は正確に)動かしやすいロボットの制御とを操作部の握り方の変更により切り替え可能にする。
【解決手段】ロボットの操作部と人との接触領域の特徴量を取得する特徴量取得部と、ロボットの制御パラメータの値を、特徴量取得部が取得した特徴量に基づき決定する制御パラメータ決定部とを有し、制御パラメータ決定部は、特徴量に応じて、異なる移動範囲で操作感が良くなる制御パラメータの値を決定する。
(もっと読む)
手術用動力伝達アダプタ及び医療用マニピュレータシステム
【課題】清潔域と不潔域との交錯を防止可能な手術用動力伝達アダプタ、及びそれを備える医療用マニピュレータシステムを提供すること。
【解決手段】術具240とアーム200との間に介在される手術用動力伝達アダプタ220であって、滅菌処理が施される清潔域に接触する第1の部位と滅菌処理が施されない不潔域に接触する第2の部位とを有するロッド222a、222bを備え、ロッド222a、222bが直動運動しても第1の部位が清潔域に位置し、かつ、第2の部位が不潔域に位置するように、ロッド222a、222bの直動運動の範囲が設定されている。
(もっと読む)
マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータにおいて、遠隔操作装置とスレーブアームとの構造が異なる構造であっても、逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】遠隔操作装置100からの操作信号を受けて、マスタ制御部201は、操作部101の姿勢変化に係る等価回転ベクトルVr(t)と直前の操作部101のマスタロール軸Xm(t)とを算出する(ステップS1)。Vr(t)とXm(t)のなす角φが規定値以下の場合には、冗長関節1(Roll2)と、関節1と冗長関係にある関節4(Roll1)のうち、Roll2を駆動関節とし、Roll1を固定関節として(ステップS3)、逆運動学計算を行う。角度φが規定値を以下でない場合には、Roll1を駆動関節とし、Roll2を固定関節として(ステップS4)、逆運動学計算を行う。
(もっと読む)
マニピュレータシステムの制御装置、マニピュレータシステム、及びマニピュレータシステムの制御方法
【課題】マニピュレータシステム利用上の手間を省き、使い勝手を向上させるマニピュレータシステムの制御装置、該制御装置を具備するマニピュレータシステム、及びマニピュレータシステムの制御方法を提供すること。
【解決手段】マニピュレータシステムに、次のようなスレーブ制御回路400を具備させる。スレーブ制御回路400は、当該マニピュレータシステムの終了時に、その終了態様を示す終了識別情報を生成し、該終了識別情報を記憶し、当該マニピュレータシステムの起動時に、前記終了識別情報を読み出す。
(もっと読む)
作業補助装置
【課題】従来に比して、製造ラインでのレイアウト性及び生産効率を向上できる作業補助装置を提供すること。
【解決手段】ワークWを保持するアタッチメント5を有し、作業者Sが付加する操作力に基づいてワークWを搬送するアーム3と、アーム3を駆動させるエアシリンダ21と、エアシリンダ21に出力するエアの圧力を調整する電空レギュレータと、電空レギュレータと通信可能に設けられて、電空レギュレータの出力エア圧を制御する制御装置7と、を備えることを特徴とする作業補助装置1である。
(もっと読む)
遠隔操作ロボット
【構成】 遠隔操作ロボット(10)は、柔軟素材からなり、人間のミニマルデザインに基づいた外観を有する外被(12)を含む。外被は、胴体部分と、頭部分と、腕部分と、脚部分とを含む。外被内にはロボット機構体(14)が収納され、ロボット機構体と外被との間には詰め物(30)が設けられる。ロボット機構体は、胴体部分などに対応する位置に形成される胴体機構(17)などを含む。外被はさらに、頭部分の前面に形成された口部分および目部分を含み、ロボット機構体の口機構(23)が口部分を動かし、目機構(25)は目部分を動かす。スピーカ(32)からは遠隔操作者の音声が出力される。マイク(34)は対話者の音声を取得する。
【効果】ロボットは人間には見えるけれども、性別や年齢は自由に想像できる人間のミニマルデザインに従った外形を有し、しかもロボットから操作者の声がでるので、対話者は、ロボット自体を操作者と強く実感できる。
(もっと読む)
遠隔操作システム
【課題】優れた力覚認識性能及び操作性を有しながら、簡易な構成で小型化が可能である遠隔操作システムを提供すること。
【解決手段】操作者により操作される操作部と、操作部の操作に伴って作動する作業部と、操作部及び作業部に夫々接続されたエネルギー変換機とを備え、エネルギー変換機は、操作部から入力される機械エネルギーを電気エネルギーに変換する第1の変換機と、第1の変換機から得られる電気エネルギーを機械エネルギーに変換して作業部に伝える第2の変換機とからなり、両変換機は1つの電気回路中に設けられ、操作部に入力される力と、作業部から出力される力とが比例関係にあり、操作部と第1の変換機の間又は作業部と第2の変換機の間の少なくともいずれか一方に介在された速度変換機構が、第1の変換機及び第2の変換機の駆動速度を、操作部及び作業部の駆動速度に比べて大きくする。
(もっと読む)
関節駆動式手術器具
【課題】信頼性が高く安全な関節駆動機構を備えた小径の関節駆動式手術器具を提供する。
【解決手段】ルーメンと、ルーメン近位端に固定されアクチューエータを含むハンドピースと、ルーメン遠位端に可動に取り付けられた近位端を有する近位関節駆動部と、アクチュエータからルーメン内を通って近位関節駆動部内へ延びる作動ケーブルと、近位関節駆動部近位端に設けた近位部ナックル、ルーメン遠位端に設けたルーメンナックル及び近位ヒンジピン周りに設けた近位ヒンジピンナックルを含む近位ナックルアッセンブリを備えたケーブルルーターと有する関節駆動式手術器具であって、作動ケーブルは、近位関節駆動部がルーメンに対して略平行であるとき、近位部ナックル、ルーメンナックル及び近位ヒンジピンナックルに当接して曲げられる。
(もっと読む)
71 - 80 / 278
[ Back to top ]