
国際特許分類[B25J9/22]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534) | 記録または再生システム (483)
国際特許分類[B25J9/22]に分類される特許
11 - 20 / 483
パラレルリンクロボットおよびその動作教示方法
【課題】パラレルリンクロボットのダイレクト教示方法は、直感的で分かりやすい教示方法である反面、ユーザの作業がそのまま転写されるため、パラレルリンクロボットが実現することが不可能な動作についても転写される場合がある。ユーザは、教示した動作がパラレルリンクロボットで実現可能な動作であることを確認するために、教示と再生とを繰り返すことで、時間を要する場合がある。
【解決手段】本発明のパラレルリンクロボットの動作教示方法は、パラレルリンクロボットの可動プレートをユーザが直接動かすことで教示された第1教示動作を取得し、前記パラレルリンクロボットの動力源である複数のモータが許容するトルクである許容トルクまたは/および前記複数のモータが許容する回転速度である許容回転速度に基づいて許容判定値を予め設定し、前記第1教示動作を前記パラレルリンクロボットの動作で実現可能か否かを前記許容判定値に基づいて判定する。
(もっと読む)
ロボットの位置姿勢補間方法及びロボットの制御装置

【課題】ロボットの手先の姿勢が一定の条件を満たすように補間できるロボットの位置姿勢補間方法を提供する。
【解決手段】各教示点を通過する移動軌跡がスプライン曲線となるように補間点を生成し(S3)、各教示点毎に、教示点と同じ座標系における撮像対象物の座標を求め、各教示点に対応する撮像対象物の座標間を、スプライン曲線により補間して補間点を生成する(S4)。教示点側の補間点を始点,撮像対象物側の補間点を終点とするアプローチベクトルを全ての補間点に対して求め(S5)、2つの教示点間の各補間点におけるノーマルベクトルの回転角を補間すると(S6)各補間点に立つアプローチ,ノーマルベクトルの外積よりオリエントベクトルを求め(S7)各補間点と3つの姿勢ベクトルの座標とから各補間点における手先の姿勢を決定する。
(もっと読む)
ロボットシステム
【課題】複数のロボットを制御するロボットシステムにおいて、意図するロボットに対して操作機により作業者が正確に動作指示を与えることを可能とする。
【解決手段】ロボットシステムは、ロボットRB1,RB2、RB3と、各ロボットの動作を制御するコントローラ10と、ケーブル11,12,13と、手動操作されることでコントローラ10を通じて各ロボットを動作させるティーチングペンダント20と、各ロボットに関する情報を表示するディスプレイ22と、を備える。コントローラ10は、ケーブル11,12,13を通じて電圧が供給される際の電圧降下量に基づいて、コントローラ10に対する各ロボットの距離である対制御装置距離を算出し、各ロボットの互いの位置関係と対制御装置距離とに基づいて、各ロボット及びコントローラ10の配置であるシステム配置を算出し、システム配置をディスプレイ22に表示させる。
(もっと読む)
ロボットの制御装置及びロボットの姿勢決定方法
【課題】ティーチング作業が、一定の条件下でより簡単になるロボットの制御装置を提供する。
【解決手段】ロボットアームの手先座標におけるカメラ21の視線に一致するアプローチベクトルaが、常に目標点である撮像対象物22の1点を向くようにティーチングを行う場合、手先の位置が教示されると、ベース座標原点から目標点を示すベクトルBPWと、手先を示すベクトルBPTとからアプローチベクトルaを求める。オリエントベクトルoをノルムを「1.0」にして決定すると、ノーマルベクトルoをアプローチベクトルaとオリエントベクトルoとの外積で決定する。教示点での手先の姿勢を示す回転行列BRTを、既知である手先座標系の姿勢を示す回転行列BRWと、ノーマル,オリエント,アプローチの各ベクトルで記述される回転行列TRWの逆行列とから求め、回転行列BRTで決まる手先の姿勢を教示点での姿勢として設定する。
(もっと読む)
プログラム生成装置及びその方法
【課題】プログラミング生成装置におけるロボット自動生成処理において、編集作業が容易となるようジョイント(Joint)動作を直線に分割する。
【解決手段】ロボットの動作を制御するための動作プログラムを軌跡情報に基づき生成するプログラム生成装置1である。そして、前記軌跡情報は複数の動作点を有し、前記複数の動作点の中から適数の動作点を選択する選択手段と、前記選択された動作点を直線でつなげて直線動作に係る変更後の軌跡情報を生成する軌跡情報変更手段とを備える。
(もっと読む)
携帯遠隔操作装置およびロボットシステム
【課題】表示部へ表示された教示データから容易にコマンドを視認することができること。
【解決手段】所定の動作をロボットへ実行させる命令ごとに表示色を設定し、設定された表示色を命令に関連付けて記憶する。また、命令をロボットへ教示するティーチングによって作成された教示データを命令に関連付けられて記憶された表示色に基づいて表示部へ表示する。さらに、表示部へ表示された教示データの表示色を所定の操作によって設定された表示色へ一時的に変更して表示部へ表示するよう携帯遠隔操作装置およびロボットシステムを構成する。
(もっと読む)
線条体の振る舞いをシミュレートするロボットシミュレーション装置
【課題】線条体の実際の振る舞いに合わせて、物理シミュレーションモデルで使用する各係数を自動調整する機能を備えたロボットシミュレーション装置の提供。
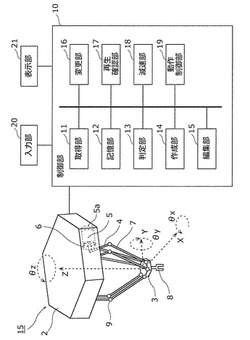
【解決手段】シミュレーション装置10は、線条体の3次元モデルを、複数の質点と、質点間を結ぶバネで構成される立体構造として生成する3次元モデル生成部12と、物理シミュレーションを行うシミュレーション部14と、実際の線条体の静的な振る舞い、動的な振る舞い、及び線条体が剛体に衝突したときの動的な振る舞いを予め記憶する記憶部16と、記憶部16に記憶されている実際の線条体の静的な振る舞いと物理シミュレーションの結果とが一致するように、後述する自動調整を行う自動調整部18とを有する。
(もっと読む)
マニピュレータ装置
【課題】操作入力手段に直接触れずに、非接触に操縦することのできるマニピュレータ装置を提供する。
【解決手段】アーム40aを有するマニピュレータ40(スレーブ)と、このマニピュレータ40の動作(動き)を制御する制御手段(スレーブコントローラ30)と、光学式の入力インターフェースを備える操作入力手段(マスタコントローラ20)とを備えるマニピュレータ装置において、上記操作入力手段の入力インターフェースとして、枠状のフレームの内側に物体検知用の光の格子が形成される光学式センサを、その厚さ方向に複数枚積み重ねて形成した3次元センサ100を用いる。
(もっと読む)
ロボット及びその教示方法
【課題】エンドエフェクタやターゲットの変形を引き起こすことなく、また、パーティクルの発生を防止できる自動教示方法を提供すること。
【解決手段】ロボット制御手段40は、アーム駆動手段を制御してロボットアーム28の先端部を移動させて、手首軸に取り付けられた接触部材50を教示ターゲット51に接触させ、接触部材50と教示ターゲット51との接触により手首軸が角変位を開始した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出して教示点の位置を決定する。
(もっと読む)
ロボット制御方法、ロボットおよびロボット制御プログラム
【課題】ワークにマーカーを残さない方法のロボット制御方法を提供する。
【解決手段】ロボット制御方法は、ロボット1がワーク10に対して行なう作業に関わる動作を実行するための制御をする方法であって、ワーク10に設けられ、当該動作に係る情報を含む制御情報を有し、消去が可能な、マーカー11を検出する検出ステップと、マーカー11を解析して制御情報を取得する解析ステップと、制御情報に基づいて当該動作を行なう作業ステップと、マーカー11を消去する消去ステップと、を有している、ことを特徴とする。
(もっと読む)
11 - 20 / 483
[ Back to top ]