
国際特許分類[B25J9/22]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534) | 記録または再生システム (483)
国際特許分類[B25J9/22]に分類される特許
21 - 30 / 483
ロボットの教示システムおよび教示方法
【課題】力制御やソフトフローティングを用いることなく、またワークを把持したロボットで作業そのものと同等の動作を必要とすることなく、組立作業の教示を行うことができるロボットの教示システムおよび教示方法を提供する。
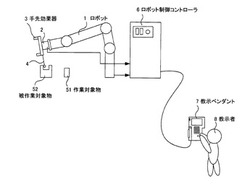
【解決手段】ロボット1に取り付けられ、弾性的に変位可能な接触プローブ4と、ロボット1に取り付けられ、接触プローブ4と被作業対象物52との接触を検出する外力検出器2と、ロボット1の動作を制御する位置速度制御部66と、接触プローブ4の接触状態が検出された場合、接触プローブ4の位置に基づいて接触位置を導出する接触位置計算部61と、複数の接触位置から被作業対象物52の位置姿勢を計算する位置姿勢計算部62と、計算された被作業対象物52の位置姿勢に基づきロボットの組み付け作業プログラムを生成する作業プログラム生成部63を備える。
(もっと読む)
オフライン教示データ作成方法、及びオフライン教示データ作成システム

【課題】オフライン教示作業において、干渉が起こる可能性のある危険な状況を感覚的に把握できて、且つその危険な状況を容易に回避できるよう、操作者に情報を提供する。
【解決手段】ワークW及び溶接ロボット2を含む3次元データを用いて溶接ロボット2に対する教示データを作成すると共に、溶接ロボット2とワークWとの距離に反比例する仮想的な反力を算出する教示データ作成装置5と、3次元データ内での溶接ロボット2の制御点の移動及び回転を入力可能であると共に教示データ作成装置5で算出された仮想的な反力を出力可能な入出力デバイス7と、を有するオフライン教示データ作成システムを用い、教示データ作成装置5において、仮想的な反力の合力を算出する反力算出ステップと、算出された仮想的な反力の合力の大きさ及び方向を入出力デバイス7に出力する反力出力ステップと、を実行してロボットの教示データを作成する。
(もっと読む)
ロボット教示方法、ロボット教示装置およびプログラム
【課題】ロボットが実行する作業に関する情報を簡便に教示できるロボット教示方法を提供する。
【解決手段】ロボット教示方法は、ワーク10に対して行なう作業に関わる動作をロボット1へ教示するための方法であって、ロボット1に備えられたカメラ6によって、マーカー15を有するワーク10の撮像を取得する撮影ステップ(ステップS2)と、当該撮像からマーカー15を検出する検出ステップ(ステップS3)と、マーカー15を解析して、ロボット1が動作をするための教示情報を取得する解析ステップ(ステップS4、S5)と、教示情報を記憶する記憶ステップ(ステップS6)と、を有する、ことを特徴とする。
(もっと読む)
溶接ロボットシステム及び可搬式教示操作装置
【課題】
溶接時の施工条件と、この条件で得られた溶接ビードの外観検査の分析結果とを容易にデータベース化することができない。
【解決手段】
ティーチペンダント10は溶接ロボットRの溶接により形成された溶接ビードを撮像し、画像を取得する撮像装置30、画像を表示するディスプレイ17、ティーチペンダント10の測定点から溶接ビードの幅方向の両側縁までの距離を取得する測距センサ37と、測距センサ37が取得した距離を使用して溶接ビード幅を算出する溶接ビード幅演算部25を備える。コントローラ40のハードディスク44は、溶接の施工条件を含む作業プログラムを記憶するとともに作業プログラムに従って溶接ロボットRが施工した溶接ビードの施工条件と、溶接ビード幅を関連付けしてデータベースとして記憶する。
(もっと読む)
ロボットシステムの教示データ作成方法及びロボットシステムでの溶接方法
【課題】断続溶接を確実に行うことができると共に、溶接作業時間を可及的に短くすることのできるオフライン教示データの作成方法を提供する。
【解決手段】本発明に係るロボットシステム1のオフライン教示データの作成方法は、断続溶接の溶接予定線に沿って設定されている溶接区間及び非溶接区間の順番及び区間長さ比を、溶接予定線を溶接する際にスライダ7が移動するスライダ移動線に適用することで、当該スライダ移動線上に、溶接区間に対応する第1スライダ移動区間と、非溶接区間に対応する第2スライダ移動区間とを設定しておき、少なくとも1つ以上の溶接区間での溶接が終わった際に、スライダ7が当該溶接区間に対応する第1スライダ移動区間に隣接する第2スライダ移動区間内に位置するように、教示データを作成する。
(もっと読む)
ロボットシステム及び可搬式教示操作装置
【課題】撮像データがどの作業プログラムによる加工結果に基づくものなのかを容易に判断できない。
【解決手段】ティーチペンダント10は、撮像装置30と撮像装置30を撮像操作するためのキーボード16を備える。コントローラ40は、キーボード16の撮像操作に応じて送信される撮像要求信号に基づいて、撮像装置30を制御するCPUを備える。撮像された画像は、作業プログラムと関連付けて記憶される。コントローラ40は、作業プログラムにおける溶接区間と関連付けされた画像データ(画像)を記録するハードディスク44を備える。記録として残しておきたいワークの状態を撮像し、得られた画像と加工作業を行うための作業プログラムを関連付けて記憶することにより、品質管理をサポートすることができる。
(もっと読む)
ティーチング装置およびティーチング方法
【課題】周辺機器との干渉を抑えるために記録される位置データの容量を抑えつつ、作業者に位置データの記録操作を意識させずにティーチングを行うことができるティーチング装置を得ること。
【解決手段】ティーチング装置50は、ロボットに対して動作経路のティーチングを行うティーチング装置であって、ロボットを移動させる際に操作される入力部に対する操作内容を受信する受信部と、ロボットの位置を検出する位置検出部と、入力部に対する操作内容が切替えられたときのロボットの位置データを位置検出部に送信させる制御部と、位置検出部から送信された位置データを記録する記憶部と、を備える。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
走行ロボットのやり直し走行、そのティーチング方法および制御方法
【課題】パスとランドマークの系列からなる経路情報に基づいて出発点から目的地点まで移動する歩行ロボットが、経路上にある障害物や道路工事中の箇所に遭遇したとき、走行できなくなる。そこで、経路情報に基づく走行を中断し、走行をやり直してから元の経路に戻る方法が課題である。
【解決手段】走行をやり直す方法を定型経路情報で表し、ティーチングで作成する。定型経路情報とは、経路情報を構成するパスやランドマークの種類や順序は決まっているが、パスの始端・終端の位置方位などの値は、実行時のセンサーのデータや通路幅などによって決まる形式の経路情報を言う。
【効果】走行ロボットの車体やセンサー、コンピュータなどは常に改良されて行く。改良の度にソフトウエアを修正する労力と現場でテストするのは大変である。本発明は、定型経路情報をティーチングにより改良するだけで良いので、労力と手間が大幅に少なくなる。
(もっと読む)
ロボット作業シーケンスの自動化プログラミングおよび最適化方法
【課題】ロボット教示において、目的指向的なプログラミング手法を提供すること。
【解決手段】制御部によって動作および作業シーケンスを実行し、少なくとも1つのセンサによって作業経過を記録し、プラニングツールが記録された作業経過を所期機械加工目的と比較して、機械加工目的と記録された作業経過に対応する機械加工の実際値との差から、所期処理目的が達成される動作および作業シーケンスを決定し、その後、決定された動作および作業シーケンスは、リアルタイムで、または段階的に、ロボットが実行可能な制御命令に変換され、所期機械加工目的を達成するように機械加工ロボットが操作される方法。
(もっと読む)
21 - 30 / 483
[ Back to top ]