
国際特許分類[B25J9/22]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534) | 記録または再生システム (483)
国際特許分類[B25J9/22]に分類される特許
51 - 60 / 483
アーク溶接ロボット制御装置
【課題】
基準面を設定して狙い角等のトーチ姿勢を数値で教示あるいは表示するアーク溶接ロボット制御装置では、溶接線を規定する教示点の位置を修正したときに、基準面を算出するための補助点も修正する必要がある。
【解決手段】
ロボット制御装置RCは、溶接線を規定する各教示点と、基準面を算出するための補助点とを、対にして記憶する記憶部を備える。ロボット制御装置RCは、溶接線上の教示点の位置変更があったとき、位置変更があった教示点と対の関係にある補助点を、前記位置変更があった教示点の修正分を補正して自動算出するCPUを備える。本来の溶接線の教示修正結果に応じて基準面を算出するための補助点も自動修正されるので、教示修正時間を大幅に短縮できる。
(もっと読む)
ロボット制御装置

【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法
【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
治具、搬送ロボット、円盤状搬送対象物アライメント方法
【課題】単一のセンサを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を正確に求める。
【解決手段】XY座標系上で移動するハンド23に着脱可能に取り付けた治具5を用いて、単一のセンサ6に対するウェーハの半径Wを算出し、その半径の値Wを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を求める。具体的には、円盤状搬送対象物の半径Wと同一の半径Wであり且つ中心51aをX軸上に一致させた第1部分円弧部51のセンサ6に対する通過距離と、円盤状搬送対象物の半径Wと同一の半径Wであり且つ中心52aをY軸方向に所定寸法変位させた第2部分円弧部52のセンサ6に対する通過距離と、中心51a,52a間のY軸方向の変位量ΔYaとを利用してセンサ6に対するウェーハの計算上の半径Wを算出する。
(もっと読む)
ロボット制御システム
【課題】予め定められた座標系でジョグ送りする場合は複数のキーの組合せ操作が必要なため操作が煩雑になる。
【解決手段】ツールの移動方向を定める方向指示キー41Aを備え、指示された移動方向および手動操作座標系に基づき、ツールをジョグ送りするロボット制御システム10である。ジョグ送り操作時に、手動操作座標系を構成する座標軸のうち1つを選択する。次に座標軸の回転角度を設定する。そして、手動操作座標系を座標軸中心に回転させ、回転後の手動操作座標系に従ってツールをジョグ送りする。上記回転角度は、ジョグダイヤル42によって設定しても良い。また、方向指示キー41のいずれか1つを押下したまま、ジョグダイヤル42によってリアルタイムに座標系を回転させながらアナログ感覚でジョグ送りすることもできる。軸方向をいつでも変更可能とすることによりジョグ送り操作時の煩雑さを解消する。
(もっと読む)
ロボット軌跡生成装置
【課題】ロボット軌跡生成装置を提供する。
【解決手段】疑似3次元空間を設定し、読み込んだ2次元データをこの3次元空間での特定の面に貼り付ける。この結果、3次元データが生成され、この3次元データに基づいてロボットのツール軌跡を生成する。2次元データが複数の面に跨る場合も、一筆書きでのロボットのツール軌跡を生成する。
(もっと読む)
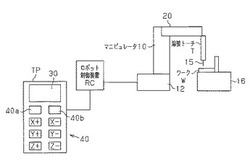
ロボットのティーチングシステム
【課題】所定図形を撮像して取得される画像に基づいてロボットを制御するティーチングシステムにおいて、ロボット周囲の設備から制約を受ける場合であっても、ティーチング棒により適切にロボットを誘導できるようにする。
【解決手段】ロボットのティーチングシステムは、複数の関節を有するアーム12を動作させる多関節型ロボット10と、ロボット10の誘導に用いられるティーチング棒60と、ティーチング棒60に設けられキャリブレーションボードCの映像を表示する表示器と、アーム12に設けられ対象を撮像して画像を取得するカメラ14と、を備える。ティーチングシステムは、ボードCの映像がカメラ14により所定の目標画像として取得されるようにアーム12の動作を追従制御するロボットコントローラ20と、ボードCの映像の大きさ及び向きの少なくとも一方を、表示器から離れた位置で変更可能とするティーチングペンダント30と、を備える。
(もっと読む)
アクチュエータ及びアクチュエータシステム
【課題】コントローラの配置位置にかかわらず、ティーチングを容易に行うことを可能とするアクチュエータ及びアクチュエータシステムを提供する。
【解決手段】アクチュエータシステムAは、アクチュエータ10と、アクチュエータ10を制御するためのコントローラ20と、アクチュエータ10のプログラムを作成するためのティーチングを行うティーチングペンダント30と、を有する。そして、アクチュエータ10は、コントローラ20と、ティーチングペンダント30と、を接続する中継ユニット11を備える。これにより、アクチュエータ10から離れた位置に、コントローラ20が配置されている場合においても、作業者は、アクチュエータ10の動作を目視しやすい位置で、ティーチングを行うことができるようになる。
(もっと読む)
操作器の表示制御装置、及び操作器の表示制御方法
【課題】最低限の大きさの表示部しか備えられないであっても、作業者の操作性を向上させることのできる表示制御装置、及び表示制御方法を提供する。
【解決手段】ティーチングペンダント10は、画像を表示する液晶表示器14を備えている。制御部30は、ロボット70の各機能の実行に用いられる各ボタンを液晶表示器14に表示させる。制御部30は、ボタンのうち説明表示が要求されているボタンを主ボタンとして、主ボタンに関連する副ボタンを選択し、主ボタン及び副ボタンの説明を、液晶表示器14のうち主ボタン及び副ボタンが表示されていない部分に表示させる。
(もっと読む)
オフラインティーチング方法
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
51 - 60 / 483
[ Back to top ]