
国際特許分類[B60K31/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両の推進装置または動力伝達装置の配置または取付け;複数の異なった原動力の配置または取付け;補助駆動装置;車両用計装または計器板;車両の推進装置の冷却,吸気,排気または燃料供給に関する配置 (25,396) | 車両速度を自動的に制御する車両付属品であって,単一のサブユニットのみに作用するもの,すなわち,車両速度が任意に設定した速度を越えるのを防止し,または車両運転者が選択した特定の速度に車両速度を維持するもの (795)
国際特許分類[B60K31/00]の下位に属する分類
電気的に作動されるサーボ機構を含むもの (5)
流体圧により作動されるサーボ機構を含むもの
遠心力に応答する装置を含むもの
制御装置の無許可での使用または調整を防止または妨げる装置をもつもの
異常または意図しない速度であることを可聴,可視または他の手段で信号する装置を含むもの
国際特許分類[B60K31/00]に分類される特許
11 - 20 / 790
トラクタの操作装置
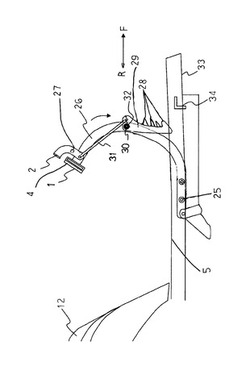
【課題】 トラクタ作業操作は、作業機を装着して特殊な作業操作を行うことが多く、トラクタ車体としての本来の走行操作は、できるだけペダル操作として、手動操作で作業機等の作業操作を行わせるのが、作業性や、作業能率、乃至安全性の向上において好ましい。
【解決手段】 HSTペダル1を前進位置Fへ踏込んだ状態で、オートクルーズ入りの操作と、オートクルーズを解除する操作を行うオートクルーズペダル2を設ける。また、前記オールトクルーズペダル2を、HSTペダル1の前周近傍部3で、このHSTペダル1のペダル面4よりも上位位置に配置して、前記HSTペダル1踏込の同足先で踏込操作してオートクルーズを入り切り可能に設ける。
(もっと読む)
車両用制御装置及び車両用制御方法

【課題】適切なタイミングで自動停止後のエンジンを再始動させることが可能な車両用制御装置及び車両用制御方法を提供する。
【解決手段】エンジン制御部80は、エンジンの自動停止条件を満たす場合にエンジンを自動停止させると共に、エンジンが自動停止された後に再始動条件を満たす場合にエンジンを再始動させる。ブレーキ油圧制御部70とエンジン制御部80とは、先行車両の追従状態において自車両の停止条件を満たす場合に先行車両に追従して自車両を自動停止させると共に、自車両の発進条件を満たす場合に先行車両に追従して自車両を自動発進させる。また、先行車状態演算部20は、先行車両の加速度を検出し、先行車追従制御部60は、検出された加速度に基づいて、自車両を自動発進させる際の発進目標加速度を演算する。エンジン制御部80は、演算された発進目標加速度を再始動条件の1つとし、再始動条件を満たす場合にエンジンを再始動させる。
(もっと読む)
追従走行制御装置
【課題】センサで検出でき且つ車車間通信可能な先行車をより容易に選択することを可能にする。
【解決手段】レーダ8の信号をもとに決定した先行車までの距離及び速度と、車車間通信で他車から取得した車両情報をもとに決定した当該他車から後続車までの距離及び当該他車の速度とをもとに、当該先行車と当該他車とが同一であるか否かを判別する。そして、同一と判別した場合に、レーダ8で捕捉している前記障害物センサで検出している先行車が車車間通信可能な先行車であることをユーザに認識させる従可能先行車捕捉情報の表示を表示装置10で行わせる。また、ユーザの入力操作に従って、レーダ8で捕捉している先行車を追従先として選択した場合には、当該先行車を追従先と決定して追従走行制御を行う。
(もっと読む)
速度表示装置及び速度表示方法
【課題】オートクルーズ走行時、設定速度と車両速度の差である領域が視認し易くなる速度表示装置及び速度表示方法を提供する。
【解決手段】オートクルーズが設定されている場合、CPU15は、現在の速度データを取得し、表示パネル11に表示された速度計30に指針指示位置43を表示させる(S2)。CPUは、設定速度キー19bにより入力された設定速度を取得し、内蔵するRAMに格納するとともに、表示パネル11に表示された速度計30に設定速度位置41を表示させる(S3)。CPU15は、現在の車両速度と設定速度の差をもとに、ゾーン領域45の表示位置およびサイズを計算し、さらに、その色合いや濃度を決定し、表示パネル11に表示された速度計30の外周にゾーン領域45を表示させる(S4)。このゾーン領域45の表示では、設定速度位置41に近いほど、モノクロ表示の濃淡が濃くなっている。
(もっと読む)
画像表示式速度計
【課題】目標速度の設定の際、その設定を行う運転者に及ぼす、情報の認知に要する負荷を軽減する。
【解決手段】速度情報を速度スケール(41)上で表示する画像表示式速度計(100)は、目標速度の設定中には、設定中の目標速度情報を表示する速度位置マーク(42)が液晶表示器(113)に出力され、目標速度の設定後には、速度位置マーク(42)の代わりに設定した目標速度情報を表示するオートクルーズマーク(43)が出力される。
(もっと読む)
車両走行制御装置
【課題】自車両の前方を走行する先行車両に自車両を追従させる追従走行制御の実行時に、先行車両を見失うロスト状態が発生した場合に、自車両の走行状態を適正に制御できるようにする。
【解決手段】自車両の前方を走行する先行車両を検出する先行車両検出手段1と、該先行車両に追従させるように自車両の走行状態を制御する車両用走行制御装置であって、上記先行車両検出手段1の検出信号に応じて先行車両のロストが発生したか否かを判定するロスト判定手段9と、該ロスト判定手段9により先行車両のロストが発生したと判定された場合に自車両の走行速度を設定車速に一致させるように制御する走行制御手段8と、上記先行車両のロスト発生時における先行車両と自車両との車間時間に応じて自車両を加速するための加速度を設定し、上記車間時間が長い場合には小さい場合に比べて小さな値の加速度を設定する加速度設定手段10とを備えたものである。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
先行車追従走行制御装置及び先行車追従走行方法
【課題】先行車追従走行中において、渋滞状況以外で並走する側方車両が存在する状況の場合では、運転者によって選定された車間設定方法で設定される目標車間距離に固執せずに、自車両が側方車両の運転手の死角に入らない様に目標車間距離を一時的に柔軟に変更することができる先行車追従走行制御装置及び先行車追従走行方法を提供する。
【解決手段】目標車間距離設定部14で、自車両が渋滞状況にあるときを除いて、周辺車両状況の安全性の高低を左側並走車の有無と右側並走車の有無に基づいて判定すると共に、この判定で安全性が低いと判定された場合に、車間設定選択部13で選択された車間設定方法(i=n)で設定される目標車間距離Dnより長い並走時目標車間距離DLに変更する。
(もっと読む)
走行制御装置
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
11 - 20 / 790
[ Back to top ]