
国際特許分類[B60K31/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両の推進装置または動力伝達装置の配置または取付け;複数の異なった原動力の配置または取付け;補助駆動装置;車両用計装または計器板;車両の推進装置の冷却,吸気,排気または燃料供給に関する配置 (25,396) | 車両速度を自動的に制御する車両付属品であって,単一のサブユニットのみに作用するもの,すなわち,車両速度が任意に設定した速度を越えるのを防止し,または車両運転者が選択した特定の速度に車両速度を維持するもの (795)
国際特許分類[B60K31/00]の下位に属する分類
電気的に作動されるサーボ機構を含むもの (5)
流体圧により作動されるサーボ機構を含むもの
遠心力に応答する装置を含むもの
制御装置の無許可での使用または調整を防止または妨げる装置をもつもの
異常または意図しない速度であることを可聴,可視または他の手段で信号する装置を含むもの
国際特許分類[B60K31/00]に分類される特許
71 - 80 / 790
車両制御装置
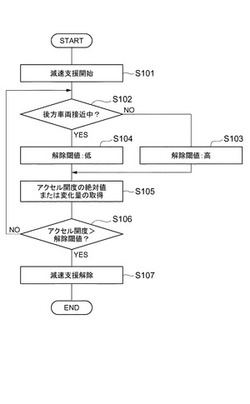
【課題】自車両の車速制限制御の解除要否を状況に応じて適切に判断することができる車両制御装置を提供する。
【解決手段】車両制御装置のECUは、自車両の減速支援を開始した後、後方物体センサの検出信号に基づいて後方車両が自車両に接近中であるかどうかを判定し、後方車両が自車両に接近中でないと判定されると、自車両の減速支援を解除するための解除閾値を高い値に設定し、後方車両が自車両に接近中であると判定されると、解除閾値を低い値に設定する。そして、ECUは、アクセル開度センサの検出信号に基づいて自車両のアクセル開度の絶対値または変化量を取得し、アクセル開度の絶対値または変化量が解除閾値よりも大きいと判定されたときは、自車両の減速支援を解除する。
(もっと読む)
ブレーキ制御装置

【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両の走行制御装置
【課題】車両の前方の物体を検知し、車両の走行軌跡を推定し、該推定された走行軌跡に基づいて、該車両の前方に所定の検知エリアを設定する。
【解決手段】物体の検知結果および設定された検知エリアに基づいて先行車を抽出し、目標車間距離に基づいて、該先行車に追従走行するよう車両を制御する。ここで、検知エリア内で検知された先行車に対する距離が目標車間距離以下であるとき、追従走行の開始に応じて該検知エリアを拡大すると共に、該先行車に対する距離が該目標車間距離より大きいとき、該検知エリアの拡大を、該追従走行を開始してから所定時間が経過するまで禁止する。こうして、隣車線上の他の車両を誤って追従走行しようとする場合には、該他の車両に安定追従する前に、該他の車両を検知エリアから外すことができる。
(もっと読む)
運転支援システム
【課題】車体速度を所望の速度に維持するよう制御する車速制御が不意に解除されてしまうことを防ぐこと。
【解決手段】アクセルペダルの操作量が増加した後に、ユーザが車速制御の開始を所望すると判定するために予め設定された「車速制御開始範囲」内となった場合には開始指示をエンジンECU2へ出力する。車速制御の実行中に、アクセルペダルの操作量が、ユーザが車速制御の継続を所望すると判定するために予め設定された、車速制御開始範囲を包含する「車速制御継続範囲」内にある場合には解除指示をエンジンECU2へ出力せず、一方、アクセルペダルの操作量が車速制御継続範囲内にはなくなった場合には解除指示をエンジンECU2へ出力する。車速制御継続範囲が車速制御開始範囲を包含するので、何らかの要因でアクセルペダルの操作量が変化しても、操作量が車速制御継続範囲にある限りにおいては車速制御が解除されない。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
追従制御装置
【課題】ACCによる追従制御時の車線変更時の車両の加速制御を的確に行う上で有利な追従制御装置を提供する。
【解決手段】ACCにより追従走行しているときの自車両201の車線変更時の加速制御のタイミングを、自車両201の走行方向が車線境界線103となす角度、車線境界線103と自車両201との距離、自車両走行車線101の前方車両202についての車両情報、隣接車線102の前方車両203、後方車両204についての車両情報をもとに決定する。また、自車両の車線変更時、自車両の走行速度と、隣接車線102の前方車両203、後方車両204の有無と、前方車両203、後方車両204が存在している場合の前方車両203、後方車両204の走行速度に応じた加速制御を行う。
(もっと読む)
車両用速度制御装置
【課題】先行車両が存在しない状況においても、ドライバにとって違和感のない速度制御を行うことができる車両用速度制御装置を提供する。
【解決手段】ブレーキペダル操作を開始し、相対速度が一定の値変化した時点で、自車両よりも初期距離だけ前を目標速度で相当する仮想先行車を設定する。そして、初期距離、目標速度から、接近離間状態評価指標の初期値を算出する。さらに、速度制御開始条件成立後の相対距離を、その条件が成立してからの経過時間と、相対速度の現在値と、初期距離とから逐次算出する。そして、これら初期距離、接近離間状態評価指標の初期値、相対距離から目標相対速度を逐次算出する。そして、目標相対速度と現在の実際の相対速度との差に基づいて速度制御を行う。よって、先行車両が存在していなくても、接近離間状態評価指標KdBを用いた、ドライバにとって違和感のない速度制御を行うことができる。
(もっと読む)
車間距離制御装置
【課題】自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とする。
【解決手段】自車の停止保持制御中に先行車が発進したとき、先行車車速推定部12で先行車の車速と加速度とに基づいて発進から所定時間後の先行車の車速を推定し、ACC目標車速設定部13で先行車と自車との車間距離及び先行車の推定車速に基づいて追従走行の目標車速を設定する。そして、ACC再セット可否判定部14で目標車速を判定閾値と比較し、目標車速が判定閾値を超えているとき、ドライバのスイッチ操作入力によるACCの再セット許可と判定し、目標車速が判定閾値以下のときには、ACC再セット禁止と判定する。これにより、自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とすることができる。
(もっと読む)
走行制御装置
【課題】 簡単な機構により容易にオートクルーズ走行制御が可能となる。
【解決手段】 走行車体に設けられた変速ペダルと、変速ペダルの踏み込み量を検出するペダルセンサ30と、走行車体のエンジンの動力を変速して出力する油圧式無段変速機32と、ペダルセンサからの出力に基づいて、油圧式無段変速機32を制御する制御部31と、オートクルーズモードを指示するオートクルーズスイッチ42と、を備え、制御部31は、オートクルーズスイッチ42から指示が出された場合、その指示がなされた際の、変速ペダルの最大踏み込み量時の走行車体速度MAX1,2で、車体速度が一定に維持されるように、油圧式無段変速機32を制御する、走行制御装置。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
71 - 80 / 790
[ Back to top ]