
国際特許分類[B60K31/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両の推進装置または動力伝達装置の配置または取付け;複数の異なった原動力の配置または取付け;補助駆動装置;車両用計装または計器板;車両の推進装置の冷却,吸気,排気または燃料供給に関する配置 (25,396) | 車両速度を自動的に制御する車両付属品であって,単一のサブユニットのみに作用するもの,すなわち,車両速度が任意に設定した速度を越えるのを防止し,または車両運転者が選択した特定の速度に車両速度を維持するもの (795)
国際特許分類[B60K31/00]の下位に属する分類
電気的に作動されるサーボ機構を含むもの (5)
流体圧により作動されるサーボ機構を含むもの
遠心力に応答する装置を含むもの
制御装置の無許可での使用または調整を防止または妨げる装置をもつもの
異常または意図しない速度であることを可聴,可視または他の手段で信号する装置を含むもの
国際特許分類[B60K31/00]に分類される特許
51 - 60 / 790
ハイブリッド車両の制御装置
【課題】 運転者の要求する走行状態を応答よく実現可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 ハイブリッド車両が車速指令値に基づいて走行制御をしているモータ走行モードにおいて、駆動トルク指令値に運転者が所定加速を要求したときの加速用駆動トルクを加算した値がモータ駆動分上限値を越えたときはエンジン併用走行モードを選択することとした。
(もっと読む)
ハイブリッド車両の制御装置

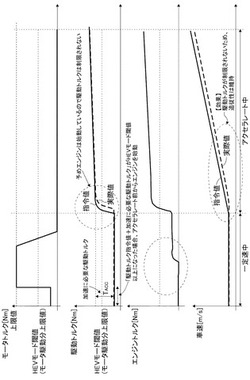
【課題】クルーズ走行中に設定車速が低下し、その設定車速が達成されるときの違和感を抑制する。
【解決手段】HEVモードを維持している状態で、運転者がステアリングスイッチ28を操作し、コースト操作を行ったら(S13の判定が“Yes”)、コーストフラグをFc=1にセットし(S18)、禁止フラグをFNG=1にセットする(S19)。設定車速Vsを達成するまでは、クルーズ要求トルクTcは負値へと転じ、停止判定閾値TOFFよりも小さくなり、エンジン停止要求となるが(S30の判定が“No”)、禁止フラグがFNG=1にセットされていることで(S25の判定が“No”)、エンジン1はON状態を維持する(S28)。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に設定車速が増加し、その設定車速を達成するまでの違和感を抑制する。
【解決手段】モータ2のみを駆動し、EVモードでクルーズ走行している状態で、運転者のスイッチ操作によって設定車速Vsが増加したら(S11、S13、S16の全てが“Yes”)、禁止フラグをFNG=1にセットしてエンジン1の始動を禁止する(S29)。このとき、モータトルク上限値TLを増加補正する(S24、S25)。車速Vが設定車速Vsまで増加し(S28の判定が“No”)、且つクルーズ要求トルクTcが始動判定閾値TONより小さければ(S36の判定が“No”)、加速期間が終了したと判断して、モータトルク上限値TLを増加補正前の通常値に復帰させる(S31)。
(もっと読む)
運転支援装置
【課題】渋滞区間の交通流を改善する運転支援装置を提供することを課題とする。
【解決手段】渋滞区間における運転支援を行う運転支援装置であって、渋滞区間の平均速度を取得する平均速度取得手段と、平均速度取得手段で取得した渋滞区間の平均速度より高い速度を渋滞区間における上限速度として設定する上限速度設定手段と、上限速度設定手段で設定した渋滞区間における上限速度に基づいて運転支援(例えば、速度制御、情報提供)を行う運転支援手段とを備えることを特徴とし、渋滞区間において運転支援装置を搭載する車両が走行している割合を取得する走行割合取得手段を備え、上限速度設定手段は、走行割合取得手段で取得した走行割合に応じて上限速度を設定すると好適である。
(もっと読む)
車両走行制御装置
【課題】異なる駆動方式を持つそれぞれの車両に対して、駆動力源が要求する駆動力指令の対象が異なっても、駆動力指令の算出方法を変更することなく要求の対象となる駆動力指令を出力する車両走行制御装置を提供する。
【解決手段】予め算出された目標車速と、検出された実車速と、に基づいて目標加速度を算出する目標加速度演算部と、目標加速度から駆動力指令を算出し、算出された駆動力指令を出力する駆動力演算部と、を有し、駆動力演算部は、接続される駆動力源に応じて、予め定めた複数の変換比を用いて変換された、複数の駆動力指令のうち、少なくとも1つを出力する。
(もっと読む)
自動車の自動変速機の制御方法
【課題】道路勾配に応じて簡単な操作で運転プログラムが割当てられる、クルーズコントロールを備えた自動車の制御方法を提供する。
【解決手段】クルーズコントロールを備えた自動車の自動変速機の制御方法は、変速機制御がクルーズコントロールのもとで外的影響、特に道路勾配に関連する別個の運転プログラムに切換えるものである。この運転プログラムは外的影響に応じて更新される。状態「設定」で別個の運転プログラムに切換えられ、状態「復帰」で運転プログラムが直ちに又は制御状態「設定」に到達した後に初めて作動されるように、変速機制御を調整することができる。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
51 - 60 / 790
[ Back to top ]