
国際特許分類[B61B10/02]の内容
処理操作;運輸 (1,245,546) | 鉄道 (8,211) | 鉄道方式;他に分類されない設備 (1,556) | パワーアンドフリー方式 (46) | 懸吊車両を有するもの (25)
国際特許分類[B61B10/02]に分類される特許
1 - 10 / 25
トロリーコンベヤ
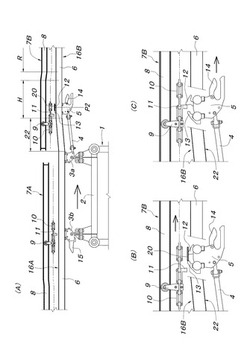
【課題】搬送用走行体の定停止位置の下手側に下り勾配経路部が設けられているようなレイアウトにおいて効果的に活用出来るトロリーコンベヤを提供する。
【解決手段】プッシャー11のガイドレール8と搬送用走行体1のガイドレール6との間の間隔が広げられた広間隔領域Hに設けられた定停止位置P2で被動トロリー5が停止している搬送用走行体1を、ストッパー20の解除により、プッシャー11で被動ドッグ12を後押し駆動して発進させたとき、搬送用走行体1のロードトロリー3aが定停止位置P2の上手側に設けられたガイドレール6の上り勾配経路部22を走行している間に被動トロリー5が、広間隔領域Hの下手側に連続する標準間隔領域R内に達して、被動トロリー5の被動ドッグ12と逆止ドッグ13との間にプッシャー11が嵌合する構成。
(もっと読む)
組付け搬送装置

【課題】精度高く部品を車体に組付け可能な組付け搬送装置を提供する。
【解決手段】組付け搬送装置10は、チェーンコンベア1、ハンガ2、自走台車3、及びロボット4を備える。ハンガ2は、車体Wを懸架し、チェーンコンベア1に牽引される。自走台車3は、ハンガ2と共に車体Wが搭載され、部品組立ラインALを往復動する。ロボット4は、自走台車3と同期して移動する。チェーンコンベア1は、部品組立ラインALの始端部ではハンガ2との係合が解除され、部品組立ラインALの終端部ではハンガ2が再び係合する。これにより、組付け搬送装置10は、部品を車体Wに組付け中は、パワーチェーン12の振動が車体Wに伝達することなく、精度高く部品を車体Wに組付けることができる。
(もっと読む)
オーバーヘッドコンベア
【課題】互いに隣り合う作業工程エリア間の一搬送距離を必要時に変更する作業が比較的容易で、しかも、管理が比較的容易でメンテナンスの頻度も比較的低いオーバーヘッドコンベアを提供する。
【解決手段】走行レール1に懸架されたハンガー装置2と、その上部より突設された搬送力受け部材3と、走行レール1の近傍に並列配備された駆動レール4と、前記駆動レール4に支持されるバー状主部材5とラック6とで形成されると共にレール長手方向Xに長い搬送力伝達杆7と、ラック6に噛合するピニオンギヤ8を駆動することで搬送力伝達杆7を一搬送距離S1の間で往復走行させる駆動手段9と、バー状主部材5の長手方向での所定箇所に締結され、搬送力伝達杆7の往動時に搬送力受け部材3を係止してハンガー装置2を一搬送距離S1だけ搬送させ、搬送力伝達杆7の復動時に離脱変位して搬送力伝達杆7を戻り移動させる係脱手段11と、を備えた。
(もっと読む)
自動車ボディ搬送装置
【課題】省スペース化、搬送精度の向上、作業性の向上、装置の小型化・簡素化・軽量化を実現する自動車ボディ搬送装置を提供する。
【解決手段】搬送経路に沿って平行に敷設された二本のパワーレール130とパワーレール130上を対峙して自走し自動車ボディBを積み込みステーション110から降ろしステーション140に向けて搬送する自動搬送電車180とを備えた自動車ボディ搬送装置において、降ろしステーション140で空になった自動搬送電車180を積み込みステーション110に戻す返送レール190が、パワーレール130の真上に敷設されていることよって前記の課題を解決する。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
索条式コンベア
【課題】搬送経路が水平カーブ状経路を含む場合であっても使用することができる索条式コンベアを得る。
【解決手段】キャリア2が、所定軌道に沿って移動可能に支持された複数のトロリ21,22間を連結ロッド25,…により連結してなるものであり、前端トロリ21及び後端トロリ22に、索条5の駆動力をキャリア2へ伝達する握索状態CLと索条5の駆動力をキャリア2へ伝達しない放索状態OPとを切り替える握索装置3,4を上下方向に揺動可能に取り付け、放索状態OPで握索装置3,4と索条5とが水平方向に相対的に揺動してもこれらが干渉しないように握索装置3,4を上下方向に揺動させる上下揺動手段を備え、水平カーブ状経路では上下揺動手段を作用させるとともに、前後の握索装置3,4の握放索の切り替えを行うことにより、水平カーブ状経路を含む搬送経路に沿ってキャリア2を移動させる。
(もっと読む)
オーバーヘッド型搬送装置
【課題】 暴走するキャリッジを短距離において停止させることができ、その際の速度検出の精度を向上させた機械的停止機能を備えた搬送装置を提供する。
【解決手段】 軌道レール1内を通過するキャリッジ2の車輪23に接触する接触部材5と、接触部材を先端に装着してなる揺動部材4と、揺動部材の一部の当接を受けてリンクするリンク部材6と、キャリッジの進行を阻害する方向に向かって進退可能に設けられたストッパ部材9と、ストッパ部材の表面に突設してなる被掛止部95と、ストッパ部材の被掛止部を掛止およびその解除を可能にしてなる掛止部材8と、掛止部材とリンク部材とを連結する連結部材7とを備えている。揺動部材が大きく揺動してリンク部材がリンクするとき、リンク部材が連結部材を介して掛止部材を回動させ、被掛止部の掛止を解除させてストッパ部材を作動させる。
(もっと読む)
索条式コンベア
【課題】キャリアを円滑かつ安定した動作で確実にストレージすることができる索条式コンベアを提供する。
【解決手段】キャリア2が複数のトロリ21,22間を連結ロッド25,…により連結してなり、前後の握索装置3,4が索条5の搬送幅方向の両側に位置して外周面同士が対向し、該外周面が握索状態CLで索条5に食い込むように回動可能に支持部材32により支持された一対の偏心ローラを備え、後握索装置4には、さらに、搬送経路に設置した握索操作体により操作されて握索状態CLになる、前記偏心ローラに取り付けられた握索被操作体及び支持部材32から後方へ突出するストレージ用放索操作体であるプッシャ57を備え、前握索装置3には、さらに、搬送経路に設置した放索操作体又はプッシャ57により操作されて放索状態OPになる、前記偏心ローラに取り付けられた放索被操作体を備える。
(もっと読む)
車両組立ラインにおけるドア搬送装置およびドア搬送方法
【課題】コンベヤの総設置距離を小さくしつつ、左右のドアの艤装組立作業を作業者が対面するかたちで行う際に、一方の作業者側でのハンガーの揺れ等が他方の作業者側での作業に影響しないドア搬送装置を提供する。
【解決手段】一次コンベヤ3と一対の二次コンベヤ4と備え、一次コンベヤ3の一次ハンガー5に各二次コンベヤ4の二次ハンガー16がそれぞれに吊り下げ支持可能となっている。特定の区間ではドアDを搭載した二次ハンガー16を二次コンベヤ4のガイドレール17から外して一次コンベヤ3によって搬送する。別の区間では各二次ハンガー16を一次ハンガー5から切り離し、それぞれの二次コンベヤ4で独立して搬送する。
(もっと読む)
吊下げ式トロリコンベア
【課題】駆動ドッグが被駆動ドッグに追突する際等の衝撃を吸収緩和することができる構成でありながらストレージピッチを一定に保つ。
【解決手段】パワーアンドフリー式オーバーヘッドコンベアにおいて、前後の吊下げ部材21,22の上下端部と前後のロードトロリ11,12及びキャリア25の上部フレーム26の前後とを左右方向ピン21A,21B,22A,22Bを介して相対的に前後揺動可能に連結し、連結杆15の前後端部と前ロードトロリ11の後部及び後ロードトロリ12の前部とを左右方向ピン及び上下方向ピン11B,15A及び12A,15Bを介して相対的に上下及び左右揺動可能に連結し、連結杆16に伸縮部16を設けて長手方向に伸縮可能とし、キャリア25が直線経路Sに沿って搬送されている状態又は直線経路S上に停止している状態において伸縮部16の短縮を阻止する短縮阻止手段を設けた。
(もっと読む)
1 - 10 / 25
[ Back to top ]