
国際特許分類[B62K3/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自転車;自転車のフレーム;自転車操向装置;特に自転車用に適した乗手操作の制御装置;車軸懸架装置;サイドカー,前方に連結する車体,その他これに類するもの (4,474) | 二輪車 (384)
国際特許分類[B62K3/00]の下位に属する分類
フレーム (24)
二人乗用自転車 (4)
特に身体障害者用に適合するもの (5)
国際特許分類[B62K3/00]に分類される特許
41 - 50 / 351
乗り物酔い抑制制御装置及びその制御方法
【課題】倒立型移動体の乗り物酔いを誘発する振動を抑制する、乗り物酔い抑制制御装置及びその制御手法を提供する。
【解決手段】乗り物酔い抑制制御装置200は、倒立型移動体の負荷状態と車輪状態を推定する負荷状態推定器206と車輪状態推定器207と、負荷状態と車輪状態に基づいて路面からの振動を支配する支配周波数を演算する支配周波数演算器208と、支配周波数が乗り物酔いを誘発する周波数かどうか判定し振動判定結果として出力する乗り物酔い判定器209と、振動判定結果に基づいて乗り物酔いしにくい負荷角度指令を出力する指令調整器202と、を備える。
(もっと読む)
移動体

【課題】走行時にタイヤの状態を把握することができる移動体を提供する。
【解決手段】移動体1は、車輪20のタイヤ21の外周情報を検出する検出部(外周情報検出部51)と、検出部が断続的に検出したタイヤ21の外周情報と、タイヤの参照用外周情報と、を比較し、比較結果に基づいてタイヤ21の状態を判定する判定部52と、を備える。特に、移動体1は、車輪20の駆動を制御することで倒立制御を行う同軸二輪車であって、使用者が乗車する車体10を備え、検出部は、車輪20の回転軸との距離が走行時に略一定となるように車体10に設けられていること、が好ましい。
(もっと読む)
同軸二輪車及びその制御方法
【課題】降車を容易に行うことができ、安全性の高い同軸二輪車を提供すること。
【解決手段】本発明にかかる同軸二輪車10は、駆動部16、補助バー14、制御部12を備える。駆動部16は、同軸に配置された2つの車輪13を駆動する。補助バー14は、搭乗者が降車を行う際に、車輪13の前方側で接地する。制御部12は、補助バー14を接地させるときに補助バー14が設けられた前方側の制御ゲインを低減し、制御ゲインに応じて駆動部16による車輪13の駆動を制御する。
(もっと読む)
車両の走行制御システム
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
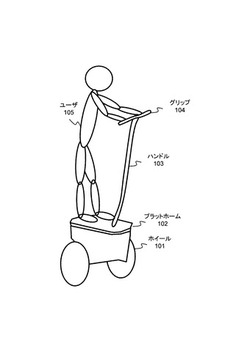
車両を制御するための装置及び方法
車両を制御するための方法であって、
前記車両は、以下を備える:
・支持体、
・少なくとも1つの車輪、
・連結構造部(ここで、該連結構造部は、
前記支持体と連結した支持部、及び前記少なくとも1つの車輪と連結した接地部を有し、並びに
前記プラットフォーム部に対して車頭及び車尾間を前記支持部が移動又は摺動することを可能にする構造である)、
・駆動部(ここで、該駆動部は
前記少なくとも1つの車輪と連結して、前記車両の動的平衡(バランス)をとり、及び
前記少なくとも1つの車輪に動力を供給して前記車両を駆動させる)
・作動装置(ここで、該作動装置は、前記連結構造部に連結され、前記プラットフォーム部に対する前記支持部の位置を制御する装置である)、
・制御部(ここで、該制御部は、
前記駆動部に連結され、前記駆動部を制御し、及び、
前記作動装置に連結され、前記作動装置を制御する制御部である)。  (もっと読む)
(もっと読む)
車両を制御するための装置及び方法
車両を制御するための方法であって、
前記車両は、以下を備える:
・支持体、
・少なくとも1つの車輪、
・連結構造部(ここで、該連結構造部は、
前記支持体と連結した支持部、及び前記少なくとも1つの車輪と連結した接地部を有し、並びに
前記プラットフォーム部に対して車頭及び車尾間を前記支持部が移動又は摺動することを可能にする構造である)、
・駆動部(ここで、該駆動部は
前記少なくとも1つの車輪と連結して、前記車両の動的平衡(バランス)をとり、及び
前記少なくとも1つの車輪に動力を供給して前記車両を駆動させる)
・作動装置(ここで、該作動装置は、前記連結構造部に連結され、前記プラットフォーム部に対する前記支持部の位置を制御する装置である)、
・制御部(ここで、該制御部は、
前記駆動部に連結され、前記駆動部を制御し、及び、
前記作動装置に連結され、前記作動装置を制御する制御部である)。  (もっと読む)
(もっと読む)
移動体
【課題】簡易な操作で、咄嗟に安定した状態で減速、停止させることができる移動体を提供する。
【解決手段】移動体1は、車輪130の駆動を制御することで倒立制御を行う同軸二輪車100と、同軸二輪車100の前方に設けられた倒立補助機構200と、を備える移動体である。倒立補助機構200は、同軸二輪車100の略上下方向に伸縮するサスペンション機構210と、サスペンション機構210に連結された補助輪220と、操作部(ブレーキレバー231)の操作に基づいて作動し、補助輪220を制動するブレーキ機構230と、ブレーキ機構230が補助輪220を制動すると、ブレーキ機構230の操作部の操作に連動して、サスペンション機構210のストロークを制限するロック機構240と、を備える。
(もっと読む)
走行装置及びその制御方法
【課題】より安定的な走行を行うことができる走行装置及びその制御方法を提供すること。
【解決手段】走行装置10は、接地部材が路面に接地した接地状態を検出する接地検出手段と、走行装置の倒立状態を維持するように駆動輪に回転トルクを付加する倒立制御を行うと共に、走行装置を移動させるように駆動輪に回転トルクを付加する駆動制御を行う制御手段と、を備えている。接地検出手段により接地部材の接地状態が検出されたとき、制御手段は、倒立制御及び駆動制御のうち、倒立制御を停止してもよい。
(もっと読む)
移動体及びその制御方法
【課題】移動体に搭乗者が乗降する際の安定性を向上させることができる移動体及びその制御方法を提供すること。
【解決手段】本発明にかかる移動体1は、駆動輪11、補助輪12、状態センサ13、制御部14、車体15、制動装置163を備える。車体15は、駆動輪11に支持され、搭乗者が搭乗可能である。補助輪12は、断面が円形状であり、少なくとも走行停止時に接地可能に配置される。また、補助輪12は、駆動輪11に対して、搭乗者の乗降時における車体15への搭乗者の荷重による荷重位置に対応する方向に配置される。状態センサ13は、車体15の走行状態を検出する。制御部14は、走行状態に基づいて駆動輪11を制御し、車体15の倒立制御を実行する。制動装置163は、補助輪12の回転を制動する。
(もっと読む)
倒立車輪型移動体
【課題】搭乗者が搭乗し又は搭乗し始めたことと、搭乗者以外の物品が載せられたことと、を区別して検知する技術を提供する。
【解決手段】センサーユニット3は、本体2に搭乗し又は搭乗し始めた搭乗者から発せられた赤外線を検知可能な人体検出用の赤外線センサ4を備える。また、赤外線センサ4は、本体2の搭乗位置(ステップ6)に設けられていることが好ましい。また、上記のセンサーユニット3は、本体2に搭乗し又は搭乗し始めた搭乗者に向けて可視光線又は赤外線を発射し、その反射光によって搭乗者の存在を検知するビームセンサ12を更に備えることが好ましい。また、ビームセンサ12は、本体2の搭乗位置(ステップ6)に設けられていることが好ましい。
(もっと読む)
41 - 50 / 351
[ Back to top ]