
国際特許分類[B62K3/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自転車;自転車のフレーム;自転車操向装置;特に自転車用に適した乗手操作の制御装置;車軸懸架装置;サイドカー,前方に連結する車体,その他これに類するもの (4,474) | 二輪車 (384)
国際特許分類[B62K3/00]の下位に属する分類
フレーム (24)
二人乗用自転車 (4)
特に身体障害者用に適合するもの (5)
国際特許分類[B62K3/00]に分類される特許
11 - 20 / 351
タイヤアセンブリ
【課題】タイヤが全体的に振動しにくく、部品点数が少なく、組付工数が少ないタイヤアセンブリを提供する。
【解決手段】タイヤアセンブリ1は、ホイール2と、ホイール2の径方向外側に配置され、路面に接地するタイヤ3と、ホイール2とタイヤ3との間に介装され、ホイール2に周方向に離間して接続される一対の接続部、一対の接続部同士を連結しタイヤ3に当接する連結部、を有する複数のばね部40が周方向および車幅方向に並べられて成るサスペンション部4と、を備える。
(もっと読む)
移動体

【課題】使用者が主体的に警報を発生させることができる移動体を提供する。
【解決手段】本発明の一形態に係る移動体1は、使用者が腿部で旋回操作部40を左右方向に傾動させることにより旋回を実現する移動体であって、警報発生部61と、旋回操作部40に設けられ、使用者の腿部で操作される警報操作部62と、警報操作部62の操作信号に基づいて、警報発生部61を制御する制御部と、を備える。これにより、使用者が主体的に警報を発生させることができる
(もっと読む)
ピッチ変調による車両制御
【課題】下地表面上の特定方向への運動に対する車両の前後安定化の方法を提供すること。
【解決手段】車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は各々の後輪を駆動し、コントローラは一律の制御規則に従い該前輪が該下地表面と接触していてもなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していてもなくても、ユーザーの操縦により支配される通りにターンを続ける。
(もっと読む)
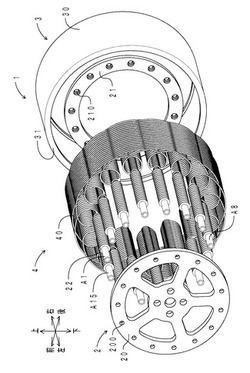
倒立二輪車
【課題】複数の状態センサ間の個体差による検知データのバラツキによって発生する無駄な消費電力を抑える。
【解決手段】相互に電気的に絶縁された第1巻線22及び第2巻線23を有し、駆動輪を回転させるための第1モータ4と、第1駆動系6と、第2駆動系7と、を備える。第1駆動系6は、第1状態センサ12と、第1制御回路11を有する。第2駆動系7は、第2状態センサ17と、第2制御回路16を有する。第1駆動系6の第1状態センサ12の第1検知データと、第2駆動系7の第2状態センサ17の第2検知データは、第1駆動系6と第2駆動系7の間で共有される。第1駆動系6の第1制御回路11は、共有している検知データに基づいて第1モータ4の第1巻線22への電力供給を制御する。第2駆動系7の第2制御回路16は、共有している検知データに基づいて第1モータ4の第2巻線23への電力供給を制御する。
(もっと読む)
倒立二輪車
【課題】モータの負荷が高い場合であっても、安定した動作を行うことができる。
【解決手段】倒立二輪車は、駆動手段にかかる負荷を取得する負荷情報取得手段と、倒立二輪車の姿勢角の情報を取得する姿勢情報取得手段と、駆動手段にかかる負荷と、姿勢情報取得手段により取得された姿勢角と、に基づいて、倒立二輪車が倒立状態を維持できる限界姿勢角と、姿勢角が限界姿勢角に達する前に警告を行うための警告姿勢角と、を求める演算部と、駆動手段を駆動制御する制御部と、を備える。制御部は、現在の姿勢角が警告姿勢角以上に傾動した場合には、ユーザに警告を発する制御を行い、現在の姿勢角が前記限界姿勢角以上に傾動した場合には、ユーザに警告するとともに前記駆動手段の出力を下げる制御を行う。
(もっと読む)
倒立振子型移動体
【課題】搭乗者による操縦不能状態となった場合に倒立振子型移動体の暴走を防ぐことができる倒立振子型移動体を提供する。
【解決手段】搭乗者が搭乗する搭乗部を有する車体と、車体に回転可能に支持された回転体と、回転体を回転駆動させる回転体駆動手段と、走行指令に従ってバランスを保ちながら倒立振子型移動体を走行させるために回転体駆動手段の制御を行う制御装置と、を備えた倒立振子型移動体において、搭乗者による操縦不能状態を検知するための操縦不能検知手段を備えるとともに、制御装置は、操縦不能検知手段によって検出される情報に基づいて操縦不能状態が検知されたときに倒立振子型移動体の走行を停止させる。
(もっと読む)
倒立型移動体及びその制御方法
【課題】特別なセンサを用いずに搭乗者の姿勢を推定可能とし、良好な制御を実現可能とする。
【解決手段】倒立型移動体201は、車輪106と、プラットフォーム101と、プラットフォーム101の鉛直方向に対する傾斜角と、車輪106の回転角度と、車輪106の回転駆動トルク指令と、車輪106の質量と、車輪106の半径と、車輪106の回転軸に関する慣性モーメントと、搭乗者202の質量と、プラットフォーム101と搭乗者102の重心との間の距離と、に基づいて、搭乗者102の鉛直方向に対する搭乗者姿勢を搭乗者姿勢推定値として推定する搭乗者姿勢推定器108と、プラットフォーム101の鉛直方向に対する傾斜角と、搭乗者姿勢推定器108で推定した搭乗者姿勢推定値と、車輪106の回転角度と、に基づいて、車輪106の回転駆動を制御する制御器103と、を備える。
(もっと読む)
輸送車両と方法
【課題】好ましい実施例において不規則な表面を有する地面上で個人を輸送する車両を提供する。
【解決手段】この実施例は人間を支持する支持体を有する。この支持体に運動可能に取り付けた地面接触モジュールは表面上の支持体中の人間を支えるように作動する。地面接触モジュールの方向付けが垂直位置で互いに交差する前-後及び横方向平面を画成する。
支持体と地面接触モジュールは組立体の構成部材である。この組立体に取り付けられ地面接触モジュールに結合したモーター付き駆動装置は、組立体とそれに付随する人間を表面上で移動させる。最後にこの実施例は制御ループを有し、この制御ループにモーター付き駆動装置が含まれ、この制御ループは地面接触モジュールに関してモーター付き駆動装置の作動により前−後及び横方向平面における安定性を力学的に高める。
(もっと読む)
倒立二輪車
【課題】倒立二輪車の信頼性を向上させること。
【解決手段】倒立二輪車10は、搭乗者の重心移動に応じて傾斜する平行リンク機構1と、平行リンク機構1に連結され、平行リンク機構1の傾斜に同期して傾斜する操作ハンドル2と、操作ハンドル2の傾斜角度を検出する角度検出手段と、平行リンク機構1の傾斜に応じて移動する移動部の移動量を検出する移動量検出手段と、移動量検出手段により検出された移動量に基づいて、操作ハンドル2の傾斜角度を算出する傾斜角算出手段と、を備えている。
(もっと読む)
倒立振子型移動体
【課題】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら走行制御が行われる倒立振子型移動体において、搭乗者の意思に基づく操縦モードと、搭乗者の意思に基づかない自動運転モードとを実現することができる倒立振子型移動体を提供する。
【解決手段】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら車体の走行制御が行われる倒立振子型移動体において、制御装置から出力される操作信号に従って搭乗者の重心位置を調節するための重心位置調節手段を備え、制御装置は、搭乗者の意思に基づかないで所定の走行制御を行う自動運転モードへの切り換え指令が生成されたときに、目標となる走行状態が実現される重心位置となるように重心位置調節手段を制御し、重心位置に基づく走行指令に従って車輪駆動手段の制御を行う。
(もっと読む)
11 - 20 / 351
[ Back to top ]