
国際特許分類[B65G35/00]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 他に分類されない機械的なコンベヤ (217)
国際特許分類[B65G35/00]の下位に属する分類
支持面上で円筒形または円柱形物品を転動するように設けられたエンドレスな牽引要素,例.ベルト,からなるコンベヤ
一端で巻き込まれ,他端で繰り出されるフレキシブルなロードキャリヤ (4)
通路,例.閉通路,に沿って動くロードキャリヤ (117)
通路,例.閉通路,に沿って移動可能な,連結されていないロードキャリヤ,例.ベルト片,の列であって,その各ロードキャリヤは互いに接触するようにされており,しかも順番に各ロードキャリヤと係合するようにされた手段により推進されるようになっているものからなるコンベヤ (24)
国際特許分類[B65G35/00]に分類される特許
61 - 70 / 72
物品を搬送するためのシャトル
物品を例えば倉庫内で搬送する通常の手段は、人的労力によるコスト、およびコンベアなどの自動機械を用いることによるコストのため、不経済となりがちである。物品を自動的に搬送するために使用されるシャトルは、より経済的でより効率的であると共により迅速な搬送を可能にする、物品を搬送する手段をもたらす。シャトル、そのシャトルを用いるシステム、およびこれらのシャトルを使用して物品を搬送する方法を開示する。  (もっと読む)
(もっと読む)
搬送用走行体の配送設備

【課題】主レールと当該主レールに接続可能な可動レールとの間で、自走手段を具備しない搬送用走行体を外部からの摩擦駆動により乗り移りさせるための受け渡し装置を備えた配送設備を提供する。
【解決手段】搬送用走行体1にはその移動方向と平行な摩擦駆動面4aが全長にわたって設けられ、可動レール6に設けられた受け渡し装置16Aは、前記摩擦駆動面4aを介して搬送用走行体1を推進させる駆動状態と駆動解除状態とに切り換え自在な摩擦駆動輪17と、この摩擦駆動輪17を、可動レール6に支持されている搬送用走行体1の摩擦駆動面4aに当接し得る後退位置Rと前記主レール11aに支持されている搬送用走行体1の摩擦駆動面4aに当接し得る進出位置Fとの間で往復移動させる摩擦駆動輪移動手段18とを備えた構成。
(もっと読む)
移動ロボットシステム

【課題】反射テープなどを利用せずに、原点復帰能力の高い移動ロボットを提供する。
【解決手段】あらかじめ直進と後退と左右90度の方向転換とを組み合わせた、移動経路の情報を車輪型ロボット1に与えおく。位置が固定されたユーザ200のいずれかが位置情報を、無線通信手段を用いてステーションPC102に伝送すると、対応する所定の経路がロボット1に対して指示され、ロボット1は、その経路に沿ってユーザ200の近傍まで移動する。復路は、往路と逆の動作をロボット1に行わせてステーション100内の定位置に戻る。この際、往路の逆動作によって復路を移動することで、精度の高い原点復帰を行わせることができる。
(もっと読む)
自走台車システムの手動操作装置
【課題】非常時にチェーン等の走行ガイドを取り外して台車を移動させることができる自走台車システムの手動操作装置を提供する。
【解決手段】非常時には、作業者が第2エンドプレートに接近して操作部材を上方に引くと、同軸ワイヤ22のワイヤ部22bを介して解除用ブラケット19がバネ23の付勢力に抗して破線矢印Aで示される方向に移動されることにより、チェーン16の端部18もこの解除用ブラケット19と共に移動され、第1エンドプレート14の切り欠きの開放端に到達すると、チェーン16の端部18のボルト部がこの切り欠きの開放端から抜け落ちて第1エンドプレート14から外れる。
(もっと読む)
搬送装置
【課題】複雑で高価な安全装置を必要とせず、また、回転駆動手段として出力が大きい物を用いる必要が無く、且つ、作業者のけがを防ぐことができる新たな搬送装置を提供する。
【解決手段】回転駆動手段31と、この回転駆動手段31に接続されてなる駆動プーリ32と、従動プーリ33と、上記駆動プーリ32と従動プーリ33とに掛け渡されて該駆動プーリ32の駆動力を従動プーリ33に伝達するとともに該駆動プーリ32と従動プーリ33との間を走行する駆動力伝達手段35と、この駆動力伝達手段35の走行に伴い支持したワークWを搬送するワーク支持部材5とを備えた搬送装置1であって、上記駆動プーリ32と上記駆動力伝達手段35との摩擦抵抗は、上記ワーク支持部材5によるワークWの搬送に必要最小限度の摩擦抵抗に設定されてなる。
(もっと読む)
搬送台車、およびそれを用いた搬送システム、ならびにそれらを用いた半導体装置の製造方法
【課題】 半導体装置の製造に際して使用するクリーンルーム内の天井側に設けた軌道を走行する搬送台車によるFOUPの搬送に関し、高速化および安定化することのできる技術を提供する。
【解決手段】 被搬送物であるFOUP10を搭載して搬送し、天井側に設けられた軌道を走行するパッシブ型の搬送台車1であって、FOUP10はその一部に搬送台車1に固定されるボトムコンベアレール13の位置決め穴15を有しており、搬送台車1の一部に位置決め穴15を固定する治具5aが設けられ、治具5aの一部に位置決め穴15を固定および解除するクランプ機構5が設けられている。
(もっと読む)
搬送システム
基板移送システムの実施例が提供される。該システムはガイドウエイ及び少なくとも1つの移送車両を有している。該移送車両は少なくとも1つの基板を保持し、ガイドウエイに支持されてそこに沿って移動することが可能である。該ガイドウエイは車両用の少なくとも1つの移動レーンと移動レーンからオフセットした少なくとも1つのアクセスレーンとを有し、よって該車両は選択自在に移動レーンにアクセスしたり移動レーンから離れたりすることが可能となる。  (もっと読む)
(もっと読む)
天井走行車システム
【課題】 工程間搬送経路を経由して、異なる工程の処理装置間で直接に物品を搬送でき、搬送時間も短く、かつ工程内搬送経路と工程間搬送経路の間のストッカを不要にすることが可能な天井走行車システムを提供する。
【解決手段】 処理装置16のロードポート26aから処理装置20のロードポート26bへ物品を搬送する。各ロードポート26に対応して天井バッファ28を設け、天井走行車14は、ロードポート26との間でも、また天井バッファ28との間でも、物品を受け渡し自在にする。
(もっと読む)
転動運搬装置
この発明は、本質的にわずかの構成要素から構成される。すなわち、ガイドレール6、6’、5’であって、それぞれ自由に回転可能な複数のローラ2を備えた転動体1、1’、8がそこに配置され、転動体のローラ間で自由に変位可能である複数の運搬体10と動作上で相互作用する。転動体はそれ自体閉じた軌道を形成するが、それらは引きも押しもされないので、チェーンではない。運搬体は単独で変位され、それぞれ転動体間で駆動される。 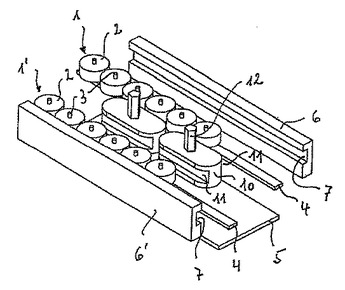 (もっと読む)
(もっと読む)
移送装置
本発明は、流体を移送する移送装置に関する。移送装置は回転盤(3,4)の周りを回転し、回転盤によって移動して流体と接触するロープ(5)と、ロープ(5)に付着した流体をロープから取り除く掃除具(8)を備える。効率的で簡単な移送装置を達成するために、移送装置は更に、ロープ(5)がその周囲を回転する回転盤(3,4)を配置した少なくとも第一および第二のハウジング(2)と、第一および第二のハウジング(2)の間に配置され、ロープ(5)が第一のハウジングから第二のハウジング内の掃除具に流体を移送するように配置されている少なくとも2つの閉じた導管(1)と、を備える。 (もっと読む)
61 - 70 / 72
[ Back to top ]