
国際特許分類[B65G49/07]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 他の分類に属せず,特殊な目的に適用されることを特徴とする移送装置 (2,620) | もろい,または損傷性材料または物品用のもの (2,337) | 半導体ウェハーのためのもの (1,051)
国際特許分類[B65G49/07]に分類される特許
11 - 20 / 1,051
真空処理装置および被処理体の搬送方法
【課題】複数台の搬送ロボットを備えた線形ツールにおいて、スループットを低下させない搬送効率の高い搬送制御を提供する。
【解決手段】真空処理装置の制御部を、処理室、搬送機構部、中間室、保持機構部のそれぞれにおける動作状態、並びに被処理体の有無およびその処理状態を表わす装置状態情報を実時間に更新して保持し、装置状態情報と、被処理体の処理時間とに基づいて、予め処理室の数・配置と被処理体の処理時間との組合せの条件毎に被処理体の搬送を制御する複数の搬送アルゴリズムをシミュレーションして得られた搬送アルゴリズム判定ルールの中から搬送アルゴリズムを選択し、および選択された前記搬送アルゴリズムに基づいて、前記被処理体の搬送先を算出するように構成した。
(もっと読む)
チャック装置

【課題】可撓性を有するワークを非接触で安定的にチャックすることができるチャック装置を提供する。
【解決手段】チャック装置1は、ワークWの鉛直上方に対向配置されて当該ワークを非接触状態で吸引する複数のベルヌーイチャック機構7、9と、複数のベルヌーイチャック機構のうち少なくとも1つのベルヌーイチャック機構について、ワークとの対向方向の位置を、他のベルヌーイチャック機構におけるワークとの対向方向の位置と異なる位置に変更可能な可変部と、を備え、可変部によってワークとの対向方向の位置が変更されるベルヌーイチャック機構が可動ワーク吸引手段を構成するとともに、当該可動ワーク吸引手段の位置変位に伴ってワークに湾曲部15を形成して当該ワークを保持する。
(もっと読む)
搬送ロボット及び真空装置
【課題】複数の搬送機構を有する搬送ロボットにおいて、スループットを向上させるとともに、搬送ロボット及びこれを配置する真空装置の高さを低く抑える技術を提供する。
【解決手段】第1及び第2の駆動軸11、12に固定された第1及び第2の上側駆動アーム21、22によって構成される上側搬送機構1Aと、第2及び第3の駆動軸12、13に固定された第1及び第2の下側駆動アーム51、52によって構成される下側搬送機構1Bとを有する。第1〜3の駆動軸11〜13は同心状に設けられている。上側搬送機構1Aは、第1の上側平行クランク機構4と第2の上側平行クランク機構5とによって構成される。下側搬送機構1Bは、第1の下側平行クランク機構6と第2の下側平行クランク機構7とによって構成される。
(もっと読む)
基体処理システム用の基体搬送装置
【課題】基体を処理するための処理システムの基体搬送装置において、搬送チャンバ内でのケーブル引き回し処理を不要とする。
【解決手段】基体搬送装置は、チャンバ壁12、テーブル14、リニアモータ搬送機構16、光学窓18、及び、レーザ計測器を備える。チャンバ壁は、搬送空間Sを画成する。テーブルは、搬送空間内に収容されている。当該テーブル上には基体を載置可能である。リニアモータ搬送機構は、搬送空間内においてリニアモータによりテーブルを移動させる。光学窓は、搬送空間と当該搬送空間の外部空間との間に設けられている。例えば、光学窓は、チャンバ壁に画成された開口を封止するように設けられる。レーザ計測器は、光学窓を介してテーブルに向けてレーザ光を照射し、テーブルからの反射光を受けて、テーブルの位置を計測する。
(もっと読む)
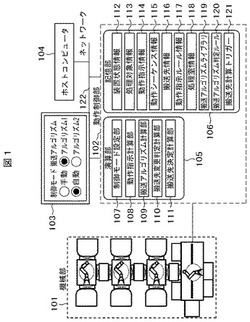
モジュール式半導体処理システム
【課題】複数の独立に動作可能な基板処理ユニット(100)を含むモジュール式半導体基板処理システム(1)を提供する。
【解決手段】
各ユニット(100)は、反応器モジュール(104)及び基板搬送モジュール(102)を含む。システム(1)内では、異なるユニット(100)の基板搬送モジュール(102)は、基板(116)がそれらの間で交換可能であるように順に相互接続される。隣接する処理ユニット(100)間での基板(116)の交換は、隣接する処理ユニットの各対と関連付けられている共有の基板受渡しステーション(130)によって容易になされる。基板の実際の搬送は、好ましくはSCARA型である基板操作ロボット(122)によって実行される。
(もっと読む)
基板処理装置
【課題】搬送途上において基板を反転することを容易に可能とする。
【解決手段】基板処理装置は、基板の上方を向く主面を処理する処理部と、基板が載置される載置部近傍の前部移載位置501と処理部近傍の後部移載位置502との間にて基板を搬送する基板搬送部5とを有する。基板搬送部5では、基板を保持する基板保持部51の両側部に一対の円筒部55が設けられ、搬送方向におよそ沿って伸びる一対の外側レール部53が基板保持部51の両側に設けられる。昇降機構571,572は、搬送方向における一対の外側レール部53の両端部に高低差を設けることにより、前部移載位置501から後部移載位置502へと一対の円筒部55を転がして、基板を反転しつつ基板保持部51を搬送する。これにより、搬送途上において基板を反転することが容易に可能となり、基板処理装置におけるスループットを向上することができる。
(もっと読む)
真空処理装置
【課題】発熱源を有し、真空槽内で移動する移動体を常時効率よく冷却することができ、メンテナンスに手間がかからない真空処理装置を提供することである。
【解決手段】真空槽1の床に敷設された軌道3に沿わせた凹溝9の底に設けた磁性体の受熱部1bと、これと対向するように移動体としてのロボット2側に設けた放熱部2bとの間に満たした磁性流体11を、放熱部2bに設けたリニアモータの2次磁極としての永久磁石4と受熱部1bの磁性体の間に発生する磁束に吸着して、受熱部1bと移動体側の放熱部2bとの間に保持することにより、放熱部2bの熱を磁性流体11を介して受熱部1bに伝達して、真空槽1内で移動する移動体を常時効率よく冷却でき、かつ、メンテナンスに手間がかからないようにした。
(もっと読む)
搬送システム
【課題】 収納ケースから基板を受取って搬送し、且つ位置決めすることができる搬送システムを提供する。
【解決手段】 搬送システム1は、収納ケース12と、昇降装置13と、受渡装置14と、搬送装置15とを備えている。昇降装置13は、収納ケース12を昇降させてその中の各基板11を順に受取位置に位置させる。受渡装置14は、受取位置の基板11を受取って受渡位置にて搬送装置15に渡す。搬送装置15は一対のベルト51,51を有している。一対のベルト51,51は、左右方向に間隔をあけて設けられ、そこには複数のプロファイル54が互いに対応付けて夫々設けられている。対応付けられたプロファイル54は、搬送方向に一緒に移動し、また受渡位置にて渡された基板11の外縁部を支持し且つその基板11を規定位置へと位置決めするよう構成されている。
(もっと読む)
板状物搬送装置
【課題】 保持テーブルと吸着パッドの平行度の自動調整を実現可能な板状物の搬送装置を提供することである。
【解決手段】 テーブル表面の傾きが異なる複数の保持テーブル間で板状物を搬送する板状物搬送装置であって、少なくとも垂直移動可能に支持されたアームと、該アームの先端部に固定され、上端部が逆円錐台形状の支持穴を有する支持ベースと、逆円錐台形状の頭部を有し、該頭部が該支持穴の逆円錐台形状部分に係合することにより該支持穴中に挿入支持された管状部材と、該管状部材の下端に連結された板状物を吸引保持する吸着パッドと、一端部が該管状部材の上端部に接続され他端が吸引源に接続された配管と、該管状部材に外嵌され、該支持ベースの肩部と該吸着パッドとの間に介装されたコイルばねと、を具備したことを特徴とする。
(もっと読む)
ハンドおよびロボット
【課題】部材の摩耗を抑えてメンテナンスの手間を軽減すること。
【解決手段】上記した課題を解決するために、基部であるプレートと、かかるプレートに配置され、半導体ウェハなどの基板の周縁部にそれぞれ接してかかる基板を把持する支持部であるところの把持爪を複数個備えたハンドおよびロボットにおいて、かかる把持爪の少なくとも1つは、基板の周縁部の当接を受けながら基板の周縁部に沿って回転するようにハンドおよびロボットを構成する。
(もっと読む)
11 - 20 / 1,051
[ Back to top ]