
国際特許分類[B65G49/07]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 他の分類に属せず,特殊な目的に適用されることを特徴とする移送装置 (2,620) | もろい,または損傷性材料または物品用のもの (2,337) | 半導体ウェハーのためのもの (1,051)
国際特許分類[B65G49/07]に分類される特許
21 - 30 / 1,051
基板搬送用ハンドおよび基板搬送ロボット
【課題】製造コストの削減および軽量化を図るとともに複数枚の基板を同時に搬送することができること。
【解決手段】基板搬送用ハンドは、第1の載置部と、第2の載置部とを備える。第1の載置部は、所定の高さの載置面にて基板を支える複数の支持部を含み、第2の載置部は、第1の載置部の載置面の高さよりも上方の載置面にて基板を支える複数の支持部を含み、該支持部のうち1または複数は退避可能である。第1の載置部に基板を載置し、さらに、第2の載置部に別の基板を載置するよう基板搬送用ハンドを構成する。
(もっと読む)
基板処理システム

【課題】キャリア搬送システムを有効に利用することができる基板処理システムを提供する。
【解決手段】基板処理装置は、FOUPをロードポートに搬入するためにキャリア搬送システムが移動してきた際に、ロードポートに別のFOUPが載置された状態である場合には、キャリア搬送システムが搬送開始を通知しても、FOUPを内部バッファへ搬送し終えるまでキャリア搬送システムに対して搬入不可を通知せず、待機させる対キャリア搬送システム制御部を備えている。したがって、前のOHTに続いてOHTがFOUPを搬送する場合であっても、後のOHTが周回軌道を回ることがない。その結果、FOUPの搬入に関してキャリア搬送システムを有効利用することができる。
(もっと読む)
基板処理システム、基板搬送方法、プログラム及びコンピュータ記憶媒体
【課題】基板処理システムのフットプリントを小さくする。
【解決手段】処理ステーション3と、カセット載置台12と、処理ステーション3とカセット載置台12との間に配置されたウェハ搬送機構21a、21bと、を備えた基板処理システム1において、処理ステーション3とウェハ搬送機構21a、21bとの間には、カセット載置台12と処理ステーション3との間で搬送されるウェハ、及び各処理ユニットの各段の間で搬送される基板を一時的に収容する複数の受け渡しユニットが多段に設けられた受け渡しブロック22が配置されている。ウェハ搬送機構21a、21bは、カセット載置台12と受け渡しブロック22との間でウェハを搬送する第1の搬送アームと、受け渡しユニットの各段の間でウェハを搬送する第2の搬送アームとを備え、ウェハ搬送機構21a、21bは、上下方向に並べて設けられている。
(もっと読む)
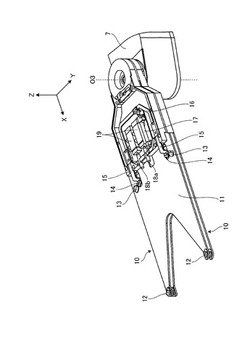
基板搬送システム、基板処理システムおよび基板搬送ロボット
【課題】ロボット設置領域を小さくして小型化を図ることが可能な基板搬送システムを提供する。
【解決手段】この基板搬送システム10は、アーム部(第1アーム部123および第2アーム部124)およびハンド部125を水平面内で回動させることによって、処理装置20側に設けられた開口部202を介して基板収納装置11内から処理装置20内に基板110を搬送するとともに、ハンド部125により基板110を支持した状態の最小旋回領域の外縁が開口部202を介して処理装置20内に突出するように構成された基板搬送ロボットを備えている。
(もっと読む)
処理システムおよび処理方法
【課題】搬送部における待機時間の発生を抑制することができる処理システムおよび処理方法を提供することである。
【解決手段】実施形態に係る処理システムは、被処理物を収納する収納部と、前記被処理物に処理を施す処理部と、前記被処理物を載置する保持部を積層方向に第1の間隔をおいて複数有する載置部と、前記収納部と、前記載置部と、の間における前記被処理物の搬送を行い、前記積層方向における第1の位置において前記載置部に侵入する第1の搬送部と、前記処理部と、前記載置部と、の間における前記被処理物の搬送を行い、前記積層方向において前記第1の位置とは異なる第2の位置において前記載置部に侵入する第2の搬送部と、を備えている。そして、前記第1の位置は、前記第2の位置を挟んで前記積層方向に2箇所設けられ、前記第1の搬送部と、前記第2の搬送部と、が前記載置部に同時期に侵入することが可能とされている。
(もっと読む)
支持装置及び支持方法
【課題】ウエハの割れや、落下を回避してウエハを安定して支持することのできる支持装置及び支持方法を提供すること。
【解決手段】半導体ウエハW等の板状部材を支持する支持装置10であって、当該支持装置10は、板状部材Wに接触する接触面11Aと、この接触面11A側に貫通する貫通孔11Bを備えた弾性部材からなる環状の接触体11と、貫通孔11Bを通じて板状部材Wに吸引力を付与する吸引手段14と、接触体11の受容部12を備えた保持体13とを含み、接触体11は、接触面側が受容部12の幅よりも狭くなる形状に設けられて当該受容部12との間に隙間を形成し、接触面11Aを板状部材Wに接触させて吸引力を付与したときに隙間内で圧縮変形するように構成されている。
(もっと読む)
搬送ロボット、筐体、半導体製造装置およびソータ装置
【課題】筐体の大型化および清浄度の低下を防止可能な搬送ロボット、筐体、半導体製造装置およびソータ装置を提供すること。
【解決手段】搬送ロボットの胴体は、上端が第1アームの最下部より下方となるよう位置するとともに、搬送ロボットが垂直になるよう固定させる固定部が設けられた垂直面を有する板状のプレートと、垂直面に設けられた昇降機構と、第1アームを回転自在に支持し、昇降機構によって垂直面を昇降可能な移動ユニットとを備える。また、第1アームの最下部は、胴体の上端と接触しない程度に胴体へ近づけられている。
(もっと読む)
保持具
【課題】 流体消費量を抑えながら、安定した保持力を維持できる保持具を提供すること。
【解決手段】 流体源に接続する流入口6を形成した本体と、負圧生成室8と、この負圧生成室8に流入口6からの流体を噴出するための噴出口とを備え、上記噴出口から噴出した流体の流れによって、負圧生成室8に負圧を生成し、この生成された負圧を利用して被保持体を保持する保持具において、噴出口12b、14bを、流体源Pからの流体の流れに対して直列に複数配置するとともに、上記流体の流れに対して上流側に位置する噴出口14bと、下流側の導入口12aとの間に隙間を設け、上記噴出口14b、導入口12a及び上記隙間によってエジェクタ機構を構成し、上記エジェクタ機構で生成した負圧と、上記負圧生成室8に生成した負圧とが相まって、被保持体Wを保持する構成にした。
(もっと読む)
コレット
【課題】従来同様の低コストな簡単な構成で半導体チップの搭載精度を悪化させることなく半導体チップの持ち帰り問題を解消し且つ高速搭載が可能で長寿命なコレットを提供する。
【解決手段】コレット10は、硬質材のシャンク13の先端の従来の半導体チップ吸着孔に圧入されて固定された硬質材の円筒突起14と、この円筒突起14に外嵌しゴム性の締め付け力で固定して設けられたラバーチップ12とで構成される。円筒突起14の先端吸着面14aは、ラバーチップ12の先端吸着面12aから突出しないように、ラバーチップ12の先端吸着面12aと同一平面か又は先端吸着面12aよりも高さh以内に引き込んだ形状で構成される。高さhは0.2mm以内である。
(もっと読む)
真空処理装置および真空処理方法
【課題】位置ずれの量を抑制してダウンタイムを低減できる真空処理装置または真空処理方法を提供する。
【解決手段】内側が減圧される処理室及びこの処理室内に配置された試料台を有する真空容器と、この真空容器と連結されて前記ウエハを2つのアームの何れかに載せて搬入または搬出するロボットと、このロボットが前記ウエハを搬入または搬出する際にこのウエハの所定の位置のズレの量を検出する手段と、この検出されたズレの量に基づいて前記ロボットの動作を調節する調節器とを備え、前記調節器は、予めティーチングを行った結果に基づいて前記ロボットの動作を調節するものであって、前記ロボットが予めティーチングを行った後にウエハを所定のパターンで搬送した際に検出されたウエハの位置ズレの量の情報に基づいて再度のティーチングを行った後にウエハの処理を行う。
(もっと読む)
21 - 30 / 1,051
[ Back to top ]