
国際特許分類[B65H54/70]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 薄板状または線条材料,例.シート,ウェブ,ケーブル,の取扱い (43,151) | 線条材料の巻取り,内巻きまたは折重ね (690) | 糸巻取機のその他の構造的特徴 (85)
国際特許分類[B65H54/70]の下位に属する分類
フィラメント材料の切断装置 (12)
機枠,枠板,覆板 (4)
駆動装置 (11)
国際特許分類[B65H54/70]に分類される特許
31 - 40 / 58
繊維機械
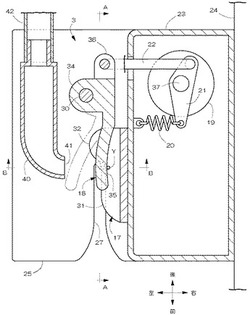
【課題】吸引ノズルの配置を好適化して、テンション装置に対する糸導入を円滑に行なえるようにしながら、ゲート体の近傍で発生する風綿を効果的に吸引し除去する。
【解決手段】テンション装置3と、同装置の周辺部で糸Yから分離した風綿を吸引する吸引ノズル40とを備えている。テンション装置3における糸Yの糸道の両側に固定側のゲート体17と可動側のゲート体18を配置する。両ゲート体17・18は、テンション装置3に導入される糸Yを挟んでテンションを付与する。テンション装置3への糸導入を容易化するために、可動側のゲート体18の外側方に吸引ノズル40を配置し、その吸引口41を一対のゲート体17・18と糸Yとの接触部の近傍に位置させる。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ

【課題】パッケージに巻き取られる糸長さを精密に測定することができる糸巻取装置を提供する。
【解決手段】自動ワインダの巻取ユニット10は、パッケージ30に所定長さの糸を巻き取るように構成される。この巻取ユニット10は、糸プール部71と、サーボモータ55と、糸長制御部90と、を備える。糸プール部71は、パッケージ30に巻き取られる前の糸を貯留する。サーボモータ55は、糸プール部71に糸を供給するために駆動される。糸長制御部90は、パッケージ30に所定長さの糸が巻き取られるように、サーボモータ55の正転パルス信号を供給カウント部91によってカウントする。そして、正転パルス信号のカウント値から、パッケージ30に巻き取られた糸長さが算出される。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】糸欠陥検出器を通過する糸送り量を正確に算出して糸欠陥の検出精度を向上させることができる糸巻取装置を提供する。
【解決手段】巻取ユニット10は、パッケージ30に巻き取られる前の糸20を貯留するための糸プール部71と、糸プール部71に糸20を供給するために駆動されるサーボモータ55と、を備える。また、巻取ユニット10は、糸欠陥を検出するために糸プール部71の上流側に配置されるクリアラ15を備える。そして、巻取ユニット10は、糸プール部71より上流側の糸送り量に基づいて、クリアラ15を通過した太さムラの長さを計算する。
(もっと読む)
糸巻取機
【課題】糸の異常な走行状態を検出することが可能な糸巻取機を提供する。
【解決手段】自動ワインダは、パッケージ駆動モータ41と、周速検出部51と、糸速度センサ60と、ユニット制御部50と、を備える。パッケージ駆動モータ41は、糸20が巻き取られる巻取ボビン22を回転駆動する。周速検出部51は、パッケージ回転センサ43が検出した巻取ボビン22の回転数と、角度センサ44からの信号に基づき求められたパッケージ30の径と、に基づき、パッケージ30の周速を検出する。糸速度センサ60は、糸20の走行速度を検出する。ユニット制御部50は、周速検出部51が検出したパッケージ30の周速と糸速度センサ60が検出した糸速度とが予め設定された相関性を有するか否かを判定する。
(もっと読む)
接触ローラ及び糸巻取機
【課題】糸を綾振りながら巻取管に巻き取ることによりパッケージを形成する糸巻取機に用いられる接触ローラにおいて、パッケージ端部における糸の挙動を安定させる構成を提供する。
【解決手段】接触ローラ101の外周面に溝2が形成されており、この溝2は、トラバース方向に対して外側に形成された溝壁6と、トラバース方向に対して内側に形成された溝壁6とを有する。トラバース方向に対して外側に形成された前記溝壁6は、糸がパッケージ幅の外側に振られることを規制する。トラバース方向に対して内側に形成された前記溝壁6は、糸がパッケージ幅の内側に戻されることを規制する。
(もっと読む)
繊維機械システム及び繊維機械
【課題】ホストコンピュータを介して通信する必要が無く、しかも機台の配置換えが容易な繊維機械システムを提供する。
【解決手段】自動ワインダシステム70は、複数の自動ワインダ60を備える。自動ワインダ60のそれぞれは、複数の糸巻取ユニット16と、機台制御装置11と、ZigBee端末12と、を備える。機台制御装置11は、前記糸巻取ユニット16の巻取情報を管理し、当該糸巻取ユニット16を制御する。ZigBee端末12は、他の自動ワインダ60が備えるZigBee端末12と直接的に無線通信することが可能である。機台制御装置11は、他の自動ワインダ60が備えた機台制御装置11と、ZigBee端末12による無線通信によって巻取情報を送受信する。
(もっと読む)
自動ワインダ
【課題】上記の負圧源に接続され、異物や糸などを吸引する部材を複数有する自動ワインダの構成を簡素とする技術を提供する。
【解決手段】給糸ボビン3から解舒された糸4を綾振りながら巻取ボビン6,7に巻き取ってパッケージ7を形成するための糸巻取ユニット2と、負圧を発生させるための負圧源62と、を備える。前記糸巻取ユニット2は、糸4及び異物のうち少なくとも何れか一方を吸引するための吸引手段(25,27,20)を複数有する。前記複数の吸引手段(25,27,20)の各基端(25b、27b、20c)と、負圧源62とは、吸引制御ユニット30を介して接合される。
(もっと読む)
糸巻取機
【課題】エネルギー効率に優れ、糸継装置による糸継作業が円滑であるとともに、綾振糸ガイドの破損を防止可能な糸巻取機を提供する。
【解決手段】自動ワインダのワインダユニット10は、給糸部24と、パッケージ駆動モータ41と、トラバースガイド11と、トラバースガイド駆動モータ45と、トラバース制御部46と、を備える。パッケージ駆動モータ41は巻取ボビン22を回転させ、給糸ボビン21からの糸20を巻き取る。トラバースガイド11は、給糸部24と巻取ボビン22との間に設けられ、巻取ボビン22への糸20の巻取の際に当該糸20を綾振りする。トラバースガイド駆動モータ45は、前記トラバースガイド11を電磁力によって往復駆動する。トラバース制御部46は、例えば異常の発生により糸20の巻取が停止したときは、トラバースガイド駆動モータ45の励磁を巻取が再開されるまでオフするように、励磁制御部63によって制御する。
(もっと読む)
糸巻取装置と、これを備えた繊維機械
【課題】巻取ユニット2内の配線を簡素とする技術を提供する。
【解決手段】糸4を供給する給糸部3と、この給糸部3から供給された糸4を巻き取る糸巻取部5と、前記の給糸部3と糸巻取部5との間に設けられ、前記糸4の糸継ぎを実行する糸継部8と、が少なくとも該当する複数の構成要素を有する巻取ユニット本体6と、前記巻取ユニット本体6の動作を制御するユニットコントローラ7と、を備える。前記複数の構成要素のうち少なくとも何れか一つの構成要素(3、11、12)は、モータ(15、36、41)を含む。前記ユニットコントローラ7と通信可能に構成され、ユニットコントローラ7から指令を受信し、受信した前記指令に基づいて、上記モータ(15、36、41)を含む構成要素(3、11、12)の動作を制御するリモートI/O基板(3r、11r、12r)が設けられる。
(もっと読む)
スプライサユニット及び糸巻取機
【課題】糸屑を回収し周囲に飛散させないスプライサユニットを提供する。
【解決手段】スプライサ装置14は糸屑を回収するための専用の集塵器80を備える。前記集塵器80は略円柱形状に構成された集塵室81を備え、前記集塵室81内部で渦回転気流74を発生させることにより、いわゆるサイクロン方式によって前記糸屑75を回収する。前記スプライサ装置14は、糸継時に糸端が導入され圧縮空気によって前記糸端を解撚する解撚パイプ82を備え、前記集塵器80は前記集塵室81の略接線方向に糸屑を導入する糸屑導入口83を備える。そして、前記圧縮空気の噴射によって生成される前記解撚パイプ82からの空気流が前記糸屑導入口83に吹き付けられることにより、前記渦回転気流74を発生させる。
(もっと読む)
31 - 40 / 58
[ Back to top ]