
国際特許分類[F16C32/04]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 軸;たわみ軸;たわみ被覆の中で運動を伝達するための機械的な手段;クランク軸機構の要素;ピボット;枢着;伝動装置,継ぎ手,クラッチまたはブレーキ要素以外の回転工学の要素;軸受 (45,306) | その他の軸受 (931) | 磁気的または電気的な支持手段を用いるもの (405)
国際特許分類[F16C32/04]に分類される特許
21 - 30 / 405
回転シャフトの軸方向位置検出装置とそのターボ分子ポンプ用途
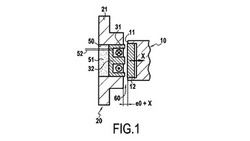
【課題】線形性を向上させ、かつ製造コストを減少させた回転機械の回転シャフトの軸方向位置の検出装置を提供する。
【解決手段】回転シャフト10の端部11に設置された強磁性材料のターゲット12と、エアギャップ60を残しつつ回転機械の構造に固定され、ターゲットと対向配置された固定磁気回路32に接続された誘導コイル31と、誘導コイルに給電するための給電回路とを含む装置であり、給電回路が、誘導コイルの第1端部と基準電圧(0V)に位置する領域との間に接続されたAC電源と、誘導コイルの第1端部と第2端部との間に接続された少なくとも1つのコンデンサと、第2端部と基準電圧に位置する領域との間に挿入された検出器デバイスとを、第2端部と基準電圧に位置する領域との間を流れる電流の大きさについての情報をライン上に供給するために有し、情報は、所定の公称値e0を有するエアギャップの幅の変更値xを表す装置である。
(もっと読む)
ラジアル磁気軸受装置および真空ポンプ

【課題】小型化を図ることができるラジアル磁気軸受装置の提供。
【解決手段】ラジアル磁気軸受装置は、ロータに固定されたシャフト3を磁気的に非接触支持するラジアル電磁石と、変位センサと、ラジアル電磁石の電流を制御する磁気軸受駆動制御部と、を備えている。そして、ラジアル電磁石は、ロータのシャフト3を挟むように対向配置された一対のN極用凸部52xp、52xmおよびシャフト3を挟むように対向配置された一対のS極用凸部52yp、52ymが形成された環状のコア50と、一対のN極用凸部52xp、52xmおよび一対のS極用凸部52yp、52ymの各々に巻き回された4つの電磁石コイル53と、を有している。磁気軸受駆動制御部は、変位センサの検出値に基づいて、一対のN極用凸部52xp、52xmから出た磁束線が一対のS極用凸部52yp、52ymへと入るように4つの電磁石コイル53に流れる電流を制御する。
(もっと読む)
磁気浮上装置
【課題】電磁石の浮上制御電流には主にセンシングキャリア周波数より低い周波数の成分が含まれているので、電磁石電流からセンシングキャリア成分のみを抽出して増幅したとしても、位置検出用信号のSN比を上げることは困難であった。
【解決手段】電磁石MGの駆動信号中に混入されているセンシングキャリア成分を検出することにより被支持体12と電磁石MGとの距離xを検出するに際し、電磁石駆動回路6の電源端子間に接続されているバイパスコンデンサCに流れるセンシングキャリア成分を検出する。このことにより、位置検出信号のSN比を上げることができる。これは、高い周波数を持つセンシングキャリア成分は主にバイパスコンデンサCから供給されるという点に着目したものである。
(もっと読む)
封入磁石アセンブリ及びその製造方法
【課題】腐食環境下でも良好な磁気軸受を提供する。
【解決手段】本発明は、封入磁石アセンブリを提供し、このアセンブリは、少なくとも1つの壁164を含み且つ少なくとも1つのアパーチャを画定するハウジング内に設けられた磁石158と、ハウジングカバーとを含む。ハウジングカバーは、磁性材料からなる第1部分154と非磁性材料からなる第2部分152を含み且つアパーチャを密閉するように構成されており、第1部分が第2部分に固定して取り付けられ、ここで取り付け部分が熱処理されている。ハウジングの壁164は、非磁性材料で形成され、ハウジングカバーの第2部分に固定して取り付けられている。
(もっと読む)
磁気浮上制御装置
【課題】質量の大きな物体の非接触支持が可能な磁気浮上制御装置を提供する。
【解決手段】浮上体30に対向する磁極から浮上体を磁気浮上させる磁束を発生する支持力発生用永久磁石21と、支持力発生用永久磁石21の浮上体30に対向する側で、前記磁極と同一の磁極が互いに向き合い、反対の磁極が向き合わないように配置された複数の磁力制御用永久磁石13、14と、磁力制御用永久磁石13、14の向き合う磁極の間隔を、浮上体に作用する磁力を強めるときには狭くし、弱めるときには拡げるように磁力制御用永久磁石を動かすアクチュエータ15、16とを備える。磁力制御用永久磁石の間隔を狭くすると、浮上体に達する支持力発生用永久磁石の磁束が集中し、浮上体に作用する磁力が強くなる。逆に、磁力制御用永久磁石の間隔を広くすると、磁束の集中が緩和され、浮上体に作用する磁力が弱くなる。
(もっと読む)
流体膜軸受の不安定性制御方法
【課題】流体膜軸受と組み合わせた磁気軸受を用いて流体膜軸受の不安定性を制御する方法の提供。
【解決手段】流体膜軸受18が主耐荷軸受として作用し、磁気軸受アッセンブリ12がこの流体膜軸受の不安定性を制御する。この効果的な組み合わせによって、安定性の問題も信頼性の問題もなく高速で使用できる軸受が提供される。流体膜軸受の不安定性を制御する代替の方法は、軸方向におけるフローを妨害することである。例えば、スリーブ(ジャーナル)軸受は、軸受軸をシャフト軸に対して傾けて製造することができ、あるいは、可変ジオメトリの軸受は、軸受の角度ミスアラインメントを作るように製造することができる。
(もっと読む)
磁気軸受装置、および回転機械
【課題】曲げ振動モードの固有周波数を安定化できる磁気軸受装置と、このスラスト磁気軸受を備えた回転機械を提供する。
【解決手段】シャフト5と一体に回転するスラストディスク27と、磁力によりスラストディスク27のスラスト力を支持するスラスト磁気軸受25と、スラストディスク27の傾きを検出する第1ラジアルセンサ23aおよび第2ラジアルセンサ23b(傾斜検出手段)と、第1ラジアルセンサ23aおよび第2ラジアルセンサ23bに検出された傾きに起因する所定周期の振動によって、スラスト磁気軸受25の磁力を制御するコントローラ21(制御部)と、から構成され、スラスト磁気軸受25は、周方向に複数に分割された第1電磁石26aおよび第2電磁石26b(磁力発生部)を有し、コントローラ21は、第1電磁石26aおよび第2電磁石26bを各々制御することを特徴としている。
(もっと読む)
軸受機構、電動機、圧縮機及び冷凍装置
【課題】駆動軸と円筒部材とのクリアランスを確保しつつ、磁気軸受の起動時に、駆動軸を磁気軸受の中心軸方向へ移動させる際に必要な最大電磁力を低減する。
【解決手段】水平方向に延びるように配置される駆動軸(13)を、通電時に非接触状態で回転自在に支持する磁気軸受(14)と、駆動軸(13)を囲む円筒状に形成され、磁気軸受(14)の非通電時に駆動軸(13)を内周下部で支持する円筒部材(19)と、磁気軸受(14)の通電開始時に円筒部材(19)の内周下部に支持される駆動軸(13)が、円筒部材(19)の内周面に沿って上方へ移動する旋回動作と、該旋回動作後の駆動軸(13)が磁気軸受(14)の中心軸方向へ移動する軸移動動作と、を行うように、磁気軸受(14)の電磁力を制御する制御部(20)と、を備える軸受機構を構成する。
(もっと読む)
モータ制御装置
【課題】複数のユニットを有するモータ制御装置において、大きな負担を必要とせずに、モータ軸の振れ回りを抑制する。
【解決手段】軸変位検出値α1,β1,α2,β2から、軸変位検出値の並進運動成分αp,βpと回転運動成分αr,βrとを求め、前記並進運動成分αp,βpと回転運動成分αr,βrのそれぞれについて、ローパスフィルタLPF1によって、軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50a,50bによって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*を演算する。そして、軸支持制御部20において、軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*に基づいて、各モータの軸変位指令値を算出する。
(もっと読む)
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
21 - 30 / 405
[ Back to top ]