
国際特許分類[F16C32/04]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 軸;たわみ軸;たわみ被覆の中で運動を伝達するための機械的な手段;クランク軸機構の要素;ピボット;枢着;伝動装置,継ぎ手,クラッチまたはブレーキ要素以外の回転工学の要素;軸受 (45,306) | その他の軸受 (931) | 磁気的または電気的な支持手段を用いるもの (405)
国際特許分類[F16C32/04]に分類される特許
71 - 80 / 405
ロール軸を支持するマグネチック軸受装置
本発明はロール軸を支持するマグネチック軸受装置に関し、特に永久磁石や電磁石を利用してロール軸を非接触式で支持するマグネチック軸受装置に関する。本発明のロール軸を支持するマグネチック軸受装置は、ロール軸に向かって形成された突出部で磁場を発生する磁石と、上記磁石を一方向に支持する胴部とを含み、上記ロール軸と上記突出部の間に空隙を形成しながら上記ロール軸を支持し、上記突出部の両側はラウンド処理されたことを特徴とする。  (もっと読む)
(もっと読む)
運動案内装置

【課題】簡単な構成で、運動案内装置における移動体の移動抵抗をより小さくしまたは、より安定させることができる技術を提供する。
【解決手段】移動ブロック1と、移動ブロック1を多数のボール5介して往復移動可能に支持する軌道レール3と、を備えた運動案内装置であって、互いに離間した2部材を有するとともに該2部材の間に非接触力である吸引力または反発力を発生させる非接触力発生手段をさらに備える。接触力発生手段における2部材のうち一方は、移動ブロック1に設けられた永久磁石6であり、非接触力発生手段の2部材のうち他方は、軌道レール3に設けられた磁性体部7である。永久磁石6と磁性体部7とは、軌道レール3に対する移動ブロック1の進行方向に対して平行な平面で互いに対向して配置される。
(もっと読む)
高真空ブースターポンプ

【課題】永久磁石を用いた受動型磁気軸受は、大型支持体を低価格で安定に回転させることが困難である。一方、水蒸気の排気速度を増大させるためにクライオトラップを付加すると同時に高温超伝導磁気軸受を利用するのは、高温超伝導体のコストと冷凍機の冷凍能力が過大となるため、システム全体でかえって高価格となる。
【解決手段】小型ボールベアリング式ターボ分子ポンプの前段に、クライオトラップと高温超伝導磁気軸受で支持された中型高真空ブースターポンプを配置する。中型高真空ブースターポンプを非接触電磁誘導結合機により、後段の小型ボールベアリング式ターボ分子ポンプと結合させ、小型ボールベアリング式ターボ分子ポンプの回転トルクで中型高真空ブースターポンプを回転させ、中型相当のターボ分子ポンプの排気速度を実現し、しかもクライオトラップで水蒸気の排気速度はクライオポンプ相当である真空ポンプシステムを実現する。
(もっと読む)
磁気ベアリング、回転段及び反射型電子ビームリソグラフィ装置
回転軸を持つ磁気ベアリングが、強磁性材料を有する円筒状ローターであって、上記円筒状ローターが、対称軸を持ち、上記円筒状ローターは、内側半径を持ち、上記円筒状ローターが、上部を持つ、円筒状ローターと、静的なハブであって、上記静的なハブが、該静的なハブから突出し、上記上部に隣接して配置されるオーバーハングを持つ、静的なハブと、上記第1の面と上記オーバーハングとの間の距離を制御するリフト磁気アクチュエータ装置と、上記内側半径と上記回転軸との間の距離を制御する半径方向の磁気アクチュエータ装置とを有する。 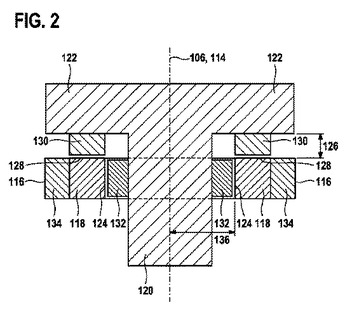 (もっと読む)
(もっと読む)
磁気軸受式大気圧動作型真空ポンプ
【課題】ターボ分子ポンプと同等の真空性能の磁気軸受式大気圧動作型真空ポンプが実現でき、磁気軸受の特徴である清浄(潤滑オイル必要なし)、超低振動(ロータとステータが無接触)、高信頼性(腐食性ガスに強い)等の利点を有する上に、1台のポンプで真空チャンバーを高真空に排気できる。
【解決手段】二つの回転翼間の結合方式を、片方の永久磁石による磁束と他方の導電体に発生する渦電流による結合方式とし、結合トルクが発生するために、常に分子流領域で動作する回転翼のほうが低い回転数であることを前提とした翼設計とする。少なくとも高真空側にある分子流領域で動作する回転翼は磁気軸受で支持し、例えば、高温超伝導磁気軸受を採用する。
(もっと読む)
磁気軸受システム
【課題】永久磁石を応用した受動型磁気軸受があるが、特定の小型ターボ分子ポンプに限定されている。その原因は2つあり、1)被支持体(ロータ)のパラメータ(重量、重心位置、慣性モーメント、慣性モーメント比、定常回転数、構造体の共振周波数等)の変更に対して自在に対応できず、異なる被支持体に対して、個別に磁気軸受の設計が必要となる、2)ロータの振れ回り現象への減衰能を大きくすることが困難。1)と2)を解消することが、受動型磁気軸受を利用する製品を拡大する課題となる。
【解決手段】上記1)、ある基本となる磁気軸受ユニットを基準にし、それに径方向受動型磁気軸受を被支持体のパラメータの変化に応じて設定付加してゆく磁気軸受システムとする。上記2)、径方向受動型磁気軸受に受動ダンパーを付加するとともに、高真空や高温環境での応用製品に対しても使用可能な金属ファイバーを利用した受動ダンパーを付加して対応する。
(もっと読む)
ターボ分子ポンプシステム
【課題】簡単かつ安価な構成により磁気軸受システムを構成し、水蒸気排気速度の増大に対応可能なターボ分子ポンプを提供する。
【解決手段】高温超伝導磁気軸受をポンプロータの軸端に設け、クライオトラップを用いた冷凍機で高温超伝導磁気軸受を冷却するよう構成したので、被支持体のパラメータの変化(例えば、回転翼の重量増大)に応じて、排気速度、支持能力、および減衰能を増大させ、高温超伝導磁気軸受部の付加コストも極小にすることができる。
(もっと読む)
磁気軸受け構造を使用した搬送のための方法及びシステム
磁気軸受け構造(100)を使用した搬送のための方法及びシステムが開示される。一態様では、荷を運ぶための装置は、磁束源(104)と、磁化可能構造(220)に相対的な磁束源(104)の位置を制御するように構成されたコントローラ(225)とを含む。磁束源(104)は、反対の極性を有する第1の上方部分と第1の下方部分とを含む。これらの第1の部分は、磁化可能構造(220)の第1の側から水平方向に間隔を空けられている。磁束源は、更に、反対の極性を有する第2の上方部分と第2の下方部分とを含む。これらの第2の部分は、磁化可能構造の第2の側から水平方向に間隔を空けられている。第2の側は、第1の側の反対側である。第1及び第2の上方部分は、磁化可能構造の上方部分に磁気的に引き付けられ、第1及び第2の下方部分は、磁化可能構造の下方部分に磁気的に引き付けられる。  (もっと読む)
(もっと読む)
制御型磁気軸受装置
【課題】 面倒な制御ゲインテーブルを作成する必要がなく、磁気浮上運転前の調整に時間を要しない制御型磁気軸受装置を提供する。
【解決手段】 制御型磁気軸受装置は、回転体4を1つの水平な制御軸X方向の所定の目標位置に磁気吸引力により非接触支持するために前記制御軸X方向の両側から回転体4を挟むように配置された1対の電磁石29Xa,29Xbを備えているものであって、回転体4の目標位置からの前記制御軸X方向の変位を検出する変位検出手段と、回転体を目標位置に支持するために各電磁石29Xa,29Xbに一定のバイアス電流および回転体4の前記変位によって変化する制御電流からなる励磁電流を供給する電磁石制御手段とを備えている。電磁石制御手段が、バイアス電流を常に0とするゼロバイアス制御を行うもので、かつ、前記変位に応じて適応的に変化するゲインで負帰還する単純適応制御を行うものである。
(もっと読む)
モータ制御装置
【課題】装置を追加することなく、停電が発生した場合でも、軸支持運転を比較的長時間保つことができるモータ制御装置を提供する。
【解決手段】停電検出器55が停電を検出したとき、駆動側制御回路11では、切替スイッチ56によって回転角速度指令値ω*を零に切り替えることにより、ベアリングレスモータ1を減速させ且つ駆動側のインバータ13を介してベアリングレスモータ1から直流リンク回路46側へベアリングレスモータ1の発電電力を回生するように駆動側のインバータ13を制御し、この回生電力が直流リンク回路46を介して軸支持側のインバータ14へ供給される構成とする。また、リミッタ下限値調整回路51では、電圧検出器54で検出される直流リンク電圧値VDCが直流リンク電圧設定値VDC*よりも低下したときに負の下限設定値を出力し、可変リミッタ57では、この負の下限設定値を可変リミッタ57の下限設定値として設定する構成とする。
(もっと読む)
71 - 80 / 405
[ Back to top ]