
国際特許分類[G01B11/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565)
国際特許分類[G01B11/00]の下位に属する分類
長さ,幅または厚み測定用 (1,947)
直径測定用 (239)
離隔対象物または離隔開口間の距離または間隙測定用 (119)
固体の変形測定用,例.光学的ひずみ計 (396)
深さ測定用 (62)
輪郭または曲率の測定用 (3,716)
角度またはテーパ測定用;軸の心合せ試験用 (1,129)
面積測定用 (118)
表面の粗さまたは不規則性測定用 (1,254)
国際特許分類[G01B11/00]に分類される特許
51 - 60 / 4,585
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
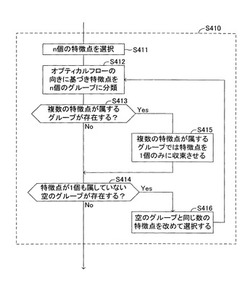
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム

【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
検査結果の目視確認作業の支援用のシステムおよび装置ならびに方法
【課題】確認対象部位を容易に特定できるような支援を行う。
【解決手段】自動外観検査が完了した対象物(基板)について、検査に用いられた画像を保存すると共に、検査における計測処理により得た計測データを計測対象部位の位置情報に紐付けて保存し、これらの保存情報を用いて、特定の被検査部位(部品100)の実際の状態を目視により確認する作業を支援するための画像を表示する。この画像は、基板の一部に相当する領域に対応し、確認対象部品100が含まれる。画像中の確認対象部品100には、枠UWやラインL1,L2などによるマーキングが施される。さらに確認対象部品100の周囲を取り巻くように、視認が可能で固有の特徴を有する特徴部位(部品101,102,103など)が抽出され、これらの特徴部位に、確認対象部品100とは異なる態様(赤枠RW)によるマーキングが施される。
(もっと読む)
印字装置および印字方法
【課題】金属コイルを固縛するバンドに跨って印字することなく、固縛後の金属コイルの表面に対して、印字レイアウトの制約を遵守しつつ情報を的確に印字できること。
【解決手段】本発明の一態様にかかる印字装置1は、バンド16によって固縛された金属コイル15に印字する装置であり、検出部2および印字レイアウト決定部8を備える。検出部2は、金属コイル15の印字対象領域の中から、バンド16の位置等を含む印字不可領域と、この印字不可領域以外の印字可能領域とを検出する。印字レイアウト決定部8は、指示された制約を加味した印字レイアウトと印字可能領域との適合度を所定の評価関数によって評価して、この制約を遵守しつつ印字可能領域に文字群を印字できる印字レイアウトの候補を複数選出し、選出した複数の候補のうち、文字群の印字面積が最大となる候補を印字レイアウトとして決定する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
車両ドア開閉の検知装置および検知方法
【課題】駅ホーム側だけで入線・停車した電車の車両ドアの開閉状態を検知することができ、外乱光や車両汚れの影響を受けず、高い検知精度で車両ドアの開閉状態に係る情報を取得でき、さらに、旅客の乗降状態および混雑状態を考慮して高い精度で車両ドアの開閉状態を検知できる車両ドア開閉の検知装置および検知方法を提供する。
【解決手段】この車両ドア開閉検知装置13は、駅ホーム11に停車した電車14の車両ドア15の開閉状態を検知する装置であり、乗降口41付近の車両床面42を含む範囲を測距対象範囲18と設定して駅ホーム側に設置された距離画像センサ21と、距離画像センサが取得した三次元距離画像44,45に基づいて車両ドアの開閉状態を判断する車両ドア開閉判断手段32とを備えている。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
同軸落射照明の光量設定方法およびラベルの位置ズレ検査方法
【課題】製品に貼着されたラベルの位置ズレ等を光学的に検出する際に、ラベルの印字パターンや製品の色、材質が異なる生産ロットで検査を行う場合にも、容易に照明レベルを適切に設定できる光量設定方法を提供する。
【解決手段】同軸落射照明22により、カメラ21のレンズと同軸上から光を照射し、カメラ21により、テープカートリッジ11上に貼着されたラベル12の貼着状態を検出する。光量設定部25は、同軸落射照明22の光量レベルを低光量レベルから高光量レベルに徐々に上昇させ、ラベル12の外縁と浅溝の縁端により生じる2つのエッジを検出し、全ての部分で2つのエッジが判定できなくなったら、このときの光量に、1以下の実験係数を乗算することで、同軸落射照明22の最適な光量を設定する。
(もっと読む)
撮像素子の異物検出方法及びその装置
【課題】撮像素子の受光面とその前方に配置されたカバーガラス等の透明体の前面及び背面のうちのいずれかの表面に存在する異物の位置、大きさ、形状を特定することができる撮像素子の異物検出方法及びその装置を提供する
【解決手段】本発明に係る異物検出装置は、撮像素子パッケージ2を装着部50に装着し、光源部60から照明光を照射して、撮像素子10の受光面の像を撮像する。光源部60から受光面10Aに照射する照明光は、例えば、平行光と、点光源からの拡散光とで切り替えられ、各々の照明光により照明している状態で撮像した撮影画像を制御・検査部80に取り込み、それらの画像を比較することによって、異物の3次元的な位置、大きさ、形状を特定する。
(もっと読む)
51 - 60 / 4,585
[ Back to top ]