
国際特許分類[G01B11/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565)
国際特許分類[G01B11/00]の下位に属する分類
長さ,幅または厚み測定用 (1,947)
直径測定用 (239)
離隔対象物または離隔開口間の距離または間隙測定用 (119)
固体の変形測定用,例.光学的ひずみ計 (396)
深さ測定用 (62)
輪郭または曲率の測定用 (3,716)
角度またはテーパ測定用;軸の心合せ試験用 (1,129)
面積測定用 (118)
表面の粗さまたは不規則性測定用 (1,254)
国際特許分類[G01B11/00]に分類される特許
81 - 90 / 4,585
画像処理装置および画像処理プログラム
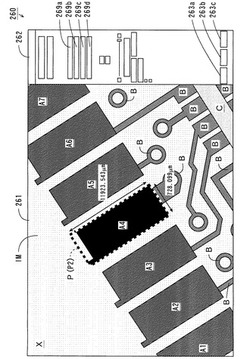
【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
座標検出装置

【課題】 表示面における遮光物の座標位置を取得するまでの処理時間が短く、かつ表示面に接触した遮光物が検出光を遮光したことを適切に判断することができないことで発生する誤検出を防止することができる座標検出装置を提供する。
【解決手段】 座標検出装置10は、矩形状の表示面5を有する表示部5aと、複数の発光素子6aと、複数の受光素子6bと、座標位置検出部とを備える。表示面5は、第1側辺1aと、第2側辺2aと、第3側辺3aと、第4側辺4aとによって形成される。第1側辺1aと第2側辺2aとが接続された第1接続部1b、および第3側辺3aと第4側辺4aとが接続された第3接続部3bのそれぞれ近傍において発光素子6aが設けられている。
(もっと読む)
摩耗検知装置および摩耗検知方法
【課題】対移動する摩耗側部品と対向側部品を配線等で接続することなく、対向側部品に設置された制御装置により摩耗側部品の摩耗状態を適切に検知する。
【解決手段】本発明の摩耗検知装置は、摩耗側部品2に設けられ、摩耗側部品2の摺動面21に沿って配置された先端部41に摩耗検知用ライン43が設けられた摩耗ゲージ4と、摩耗側部品2に設けられ、摩耗検知用ライン43に接続される摩耗側発光素子6と、対向側部品3において、摩耗側部品2の摺動中に摩耗側発光素子6と対向可能な位置に設けられた受光素子8と、対向側部品3に設けられ、受光素子8による受光状態に基づいて摩耗ゲージ4の摩耗状態を検知する制御装置9とを備える。
(もっと読む)
エッジ位置検出装置
【課題】帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供する。
【解決手段】帯状体10の一方の面側に製造ラインに存在しない色を着色したカラー板2を配置し、帯状体10を挟んでカラー板2と対向配置したカラーCCDカメラ3によって、カラー板2と帯状体10のエッジ部とを撮像する。そして、カラーCCDカメラ3で撮像したカラー画像の各画素の色情報と、カラー板2の着色面と同一色の色情報との類似度をそれぞれ算出し、帯状体10の幅方向で上記類似度が低下する位置を帯状体10のエッジ位置として検出する。
(もっと読む)
検査装置及び方法
【課題】スポット溶接部の有無及び位置を精度良く計測することができる検査装置及び検査方法を提供する。
【解決手段】取得画像上のスポット溶接部を抽出する溶接部抽出部と、抽出したスポット溶接部の座標を算出する座標算出部9と、光線によって計測対象物上に指し示された3点以上の基準点を取得画像から抽出する基準点抽出部20と、抽出した取得画像上の基準点の座標を基に正対対象物に対する計測対象物の傾斜及び倍率のずれに起因する誤差を補正する補正値を算出する第1の補正値算出部21と、取得画像上の計測対象物の特徴量を抽出する特徴量抽出部22と、抽出した特徴量から計測対象物の蛇行及び撮像軸周りの回転に起因する誤差を補正する補正値を算出する第2の補正値算出部23と、補正値算出部21,23で算出した補正値によりスポット溶接部の座標を補正する座標補正部24とを備えている。
(もっと読む)
計測装置及び計測方法
【課題】参照面と被検面との間の距離の計測において、計測範囲の広範囲化の技術を提供する。
【解決手段】光源からの第1光を参照面に入射させ第2光を被検面に入射させる分割素子と、前記参照面で反射された前記第1光と前記被検面で反射された前記第2光との干渉光の位相をシフトさせる位相シフト部と、前記干渉光の強度を検出する検出部と、前記光源からの光の周波数を連続的に3つ以上の周波数に設定し前記3つ以上の周波数のそれぞれについて前記干渉光の位相をシフトさせながら前記干渉光の強度を検出するように前記検出部を制御し検出される前記干渉光の強度及び前記位相シフト部による前記干渉光の位相のシフト量に基づいて、前記参照面と前記被検面との間の光路長に相当する位相を特定し前記参照面と前記被検面との距離を求める処理部と前記処理部は前記3つ以上の周波数のそれぞれの間の周波数差が互いに異なるように前記3つ以上の周波数を設定する。
(もっと読む)
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
(もっと読む)
エンジンボア表面傷の評価方法
【課題】スカッフィングを精度よく検出できるとともに、スカッフィングの大きさを定量的に評価できるエンジンボア表面傷の評価方法を提供する。
【解決手段】解析画像データ41を取得して、第一周波数スペクトル42を求める工程S10・S20と、フィルタリングした第一周波数スペクトル42を復元し、二次元凹凸データ45を生成するステップS30〜S50と、二次元凹凸データ45から第二周波数スペクトル46を求めるとともに、スカッフィングW3を検出するステップS60・S70と、二次元凹凸データ45から第三周波数スペクトル47を求めるとともに、フィルタリングした第二周波数スペクトル46を復元するステップS80〜S110と、復元した二次元凹凸データ49よりスカッフィングW3を評価するステップS120〜S150とを行う。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
視線分析装置、視線計測システム、方法、プログラム、記録媒体
【課題】本発明の課題は、被験者の視線を推定・追跡することで、評価対象印刷物の掲載情報または陳列棚の商品の注目度を分析評価するシステムを提供することである。
【解決手段】
メガネを通して見るシーン画像とシーン画像上の注視点座標を視線分析装置に送信する視線追跡メガネと、基準画像および基準画像の分割画像の、特徴点の座標と特徴量を記憶する手段と、視線追跡メガネからシーン画像と注視点座標を受信する手段と、シーン画像の特徴点の特徴量と分割画像の特徴点の特徴量とに基づき最も類似度評価の高い特徴点を組み合せる手段と、最も多い組合せ個数を持つ分割画像の特徴点の座標とシーン画像の特徴点の座標に基づいて座標変換行列を算出する手段と、座標変換行列とシーン画像上の注視点座標から算出した分割画像上の注視点座標を、基準画像に変換して注視点マークを合成する手段と、を備える視線分析装置と、特徴とする視線計測システムである。
(もっと読む)
81 - 90 / 4,585
[ Back to top ]