
国際特許分類[G01B11/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565)
国際特許分類[G01B11/00]の下位に属する分類
長さ,幅または厚み測定用 (1,947)
直径測定用 (239)
離隔対象物または離隔開口間の距離または間隙測定用 (119)
固体の変形測定用,例.光学的ひずみ計 (396)
深さ測定用 (62)
輪郭または曲率の測定用 (3,716)
角度またはテーパ測定用;軸の心合せ試験用 (1,129)
面積測定用 (118)
表面の粗さまたは不規則性測定用 (1,254)
国際特許分類[G01B11/00]に分類される特許
61 - 70 / 4,585
同軸落射照明の光量設定方法およびラベルの位置ズレ検査方法
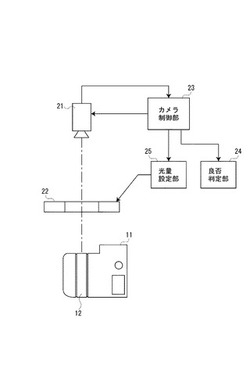
【課題】製品に貼着されたラベルの位置ズレ等を光学的に検出する際に、ラベルの印字パターンや製品の色、材質が異なる生産ロットで検査を行う場合にも、容易に照明レベルを適切に設定できる光量設定方法を提供する。
【解決手段】同軸落射照明22により、カメラ21のレンズと同軸上から光を照射し、カメラ21により、テープカートリッジ11上に貼着されたラベル12の貼着状態を検出する。光量設定部25は、同軸落射照明22の光量レベルを低光量レベルから高光量レベルに徐々に上昇させ、ラベル12の外縁と浅溝の縁端により生じる2つのエッジを検出し、全ての部分で2つのエッジが判定できなくなったら、このときの光量に、1以下の実験係数を乗算することで、同軸落射照明22の最適な光量を設定する。
(もっと読む)
撮像素子の異物検出方法及びその装置

【課題】撮像素子の受光面とその前方に配置されたカバーガラス等の透明体の前面及び背面のうちのいずれかの表面に存在する異物の位置、大きさ、形状を特定することができる撮像素子の異物検出方法及びその装置を提供する
【解決手段】本発明に係る異物検出装置は、撮像素子パッケージ2を装着部50に装着し、光源部60から照明光を照射して、撮像素子10の受光面の像を撮像する。光源部60から受光面10Aに照射する照明光は、例えば、平行光と、点光源からの拡散光とで切り替えられ、各々の照明光により照明している状態で撮像した撮影画像を制御・検査部80に取り込み、それらの画像を比較することによって、異物の3次元的な位置、大きさ、形状を特定する。
(もっと読む)
キャリブレーション方法および基板検査装置
【課題】撮像装置とキャリブレーションマークとの位置関係に係わらず、撮像装置をキャリブレーションするに十分な、キャリブレーションマークの撮像画像を取得する。
【解決手段】単一のキャリブレーションマークを複数回撮像することによって、複数の基準マークが配置されたキャリブレーションを撮像したときと同様の画像マークを取得し、この画像マークに基づいて撮像装置について中心位置、取り付け角度、分解能等のキャリブレーションを行う。単一のキャリブレーションマークを異なる撮像位置で複数回撮像して画像マークを取得する撮像工程と、複数回の撮像で取得したキャリブレーションマークの各画像マークを用いて、複数個の画像マークを有した撮像画像を形成する撮像画像形成工程と、撮像画像の画像マークの位置と撮像画像上の基準位置とに基づいて、撮像装置のキャリブレーション情報を算出するキャリブレーション情報算出工程とを備える。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
目標位置検出装置、該検出装置に用いられる目標位置検出方法及び目標位置検出プログラム
【課題】夜間でも複数の目標対象物の捜索が可能な目標位置検出装置を提供する。
【解決手段】目標対象物位置特定手段(画像処理・座標演算装置21)により、画像記録部33に記録されている赤外画像iu、及びデータ記録部34に記録されているGPS/姿勢データfdが解析され、発熱物体が存在する位置が目標対象物の位置として特定される。この場合、画像処理・座標演算装置21により、赤外画像iu及びGPS/姿勢データfdに基づいて、各赤外画像iu上の発熱物体の座標位置を、赤外カメラ13の位置を基準とする方位ベクトル線に対応付けることにより、発熱物体に対して時系列の方位ベクトル線群が生成され、方位ベクトル線群を構成する各方位ベクトル線の共通部分が目標対象物の絶対座標(緯度、経度、及び高さ)として特定されて対象地点座標データedが出力される。
(もっと読む)
計測装置
【課題】コストの増加を抑えながら参照面と被検面との間の光路長差の変化に起因する計測誤差を低減し、参照面と被検面との間の距離を計測する計測装置を提供する。
【解決手段】周波数を走査可能なn(n=2以上の整数)個の光源と、前記n個の光源からのそれぞれの光を分割し、参照面と被検面とに入射させる分割素子と、前記参照面で反射された光と、前記被検面で反射された光との干渉により形成されるn個の干渉光を検出して干渉信号を出力する検出部と、前記距離を求める処理部と、前記処理部は、前記n個の光源のうち1つの第1光源からの光の周波数を第1方向に第1走査速度で走査するように制御し、且つ、前記n個の光源のうち他の1つの第2光源からの光の周波数を第1方向とは逆の第2方向に前記第1走査速度とは異なる第2走査速度で走査するように制御し、前記n個の光源を制御している間の前記干渉信号に基づいて、前記距離を求める。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
熱源位置角度検出方法
【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
多波長干渉計、計測装置および計測方法
【課題】 被検面が傾いていても測定精度を悪化させることのない多波長干渉計を提供する。
【解決手段】 波長が互いに異なる少なくとも2つの光束を参照光と被検光とに分割し、分割された参照光の周波数と被検光の周波数とを異ならせ、被検光と参照光とを干渉させる干渉計において、干渉光を複数の光束に分割する分割部を有し、分割された複数の光束を各波長について検出する。
(もっと読む)
座標検出装置
【課題】 表示面における遮光物の座標位置を取得するまでの処理時間が短く、かつ表示面に接触した遮光物が検出光を遮光したことを適切に判断することができないことで発生する誤検出を防止することができる座標検出装置を提供する。
【解決手段】 座標検出装置10は、矩形状の表示面5を有する表示部5aと、複数の発光素子6aと、複数の受光素子6bと、座標位置検出部とを備える。表示面5は、第1側辺1aと、第2側辺2aと、第3側辺3aと、第4側辺4aとによって形成される。第1側辺1aと第2側辺2aとが接続された第1接続部1b、および第3側辺3aと第4側辺4aとが接続された第3接続部3bのそれぞれ近傍において発光素子6aが設けられている。
(もっと読む)
61 - 70 / 4,585
[ Back to top ]