
国際特許分類[G01B11/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565)
国際特許分類[G01B11/00]の下位に属する分類
長さ,幅または厚み測定用 (1,947)
直径測定用 (239)
離隔対象物または離隔開口間の距離または間隙測定用 (119)
固体の変形測定用,例.光学的ひずみ計 (396)
深さ測定用 (62)
輪郭または曲率の測定用 (3,716)
角度またはテーパ測定用;軸の心合せ試験用 (1,129)
面積測定用 (118)
表面の粗さまたは不規則性測定用 (1,254)
国際特許分類[G01B11/00]に分類される特許
71 - 80 / 4,585
計測装置及び計測方法
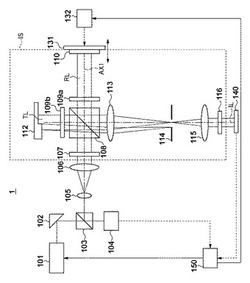
【課題】参照面と被検面との間の距離の計測において、計測範囲の広範囲化の技術を提供する。
【解決手段】光源からの第1光を参照面に入射させ第2光を被検面に入射させる分割素子と、前記参照面で反射された前記第1光と前記被検面で反射された前記第2光との干渉光の位相をシフトさせる位相シフト部と、前記干渉光の強度を検出する検出部と、前記光源からの光の周波数を連続的に3つ以上の周波数に設定し前記3つ以上の周波数のそれぞれについて前記干渉光の位相をシフトさせながら前記干渉光の強度を検出するように前記検出部を制御し検出される前記干渉光の強度及び前記位相シフト部による前記干渉光の位相のシフト量に基づいて、前記参照面と前記被検面との間の光路長に相当する位相を特定し前記参照面と前記被検面との距離を求める処理部と前記処理部は前記3つ以上の周波数のそれぞれの間の周波数差が互いに異なるように前記3つ以上の周波数を設定する。
(もっと読む)
光学的位置検出装置

【課題】対象物体の2次元的な位置を1台の装置で光学的に検出することは困難であること。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
(もっと読む)
触針式測定装置
【課題】触針が測定点の直上に位置している状態において測定対象物の表面の測定点を実質的に真上から検知することを可能とする観察手段を備えた触針式測定装置を提供する。
【解決手段】触針式測定装置100において、長手軸線方向に延在する細長い触針110であって、測定対象物10の表面12の所定の測定点14に運ばれて同測定点14に接触するようにされる尖端部112を有する触針110と、該触針110の周囲の少なくとも一部に配置され、表面12の測定点14及び該測定点14の周囲からの光を受光する受光部130と、を備え、受光部130で受光した光に基づき、測定点14に対する尖端部112の位置決めを行う。
(もっと読む)
摩擦撹拌接合装置
【課題】被接合部材の目違いが生じたとしても、接合不良の発生を防止可能な摩擦撹拌接合装置を提供する。
【解決手段】被接合部材W1同士を接合する摩擦撹拌接合装置1であって、被接合部材W1同士の接合を行なう工具11を保持する工具保持部12と、工具11による接合方向の前方に設けられ、被接合部材W1の接合箇所の表面を押圧する押圧手段13と、押圧手段13と工具11との間における被接合部材W1同士の目違いを検出する目違い検出手段17とを備えることを特徴とする。
(もっと読む)
光学式センサ
【課題】ノイズ光の入射により検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、誤検出が生じるのを防止する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
エッジ位置検出装置
【課題】帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供する。
【解決手段】帯状体10の一方の面側に、直線偏光を投射する投光器2と偏光フィルタを介して光を受光する受光器4とを配置し、帯状体10の他方の面側に、投光器2から投射される直線偏光が入射され、入射された直線偏光の偏光方向を偏光フィルタの透過軸に一致する方向に変化させて反射する偏光反射板3を配置する。そして、受光器4の各受光素子で得られた受光量が帯状体10の幅方向でする位置を検出し、その位置を帯状体10のエッジ位置として検出する。
(もっと読む)
検出装置
【課題】可及的にワークの移動が自由であり、後工程の作業の妨げともなりにくい簡易な構成のワーク位置の検出装置を提供する。
【解決手段】検出光(40)を投光する投光部(10)と、検出光を受光する受光部(20)と、投光部と受光部を所定の位置関係に保つ支持手段(30)と、を備え、受光部が一次元又は二次元に配置された複数の受光素子を含み、上記支持手段が、投光部と受光部との間に設けられる検出基準面に対して検出光(40)が斜めになるように投光部と受光部の位置を保持する。
(もっと読む)
71 - 80 / 4,585
[ Back to top ]