
光学的位置検出装置
【課題】対象物体の2次元的な位置を1台の装置で光学的に検出することは困難であること。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の位置を光学的に検出する光学的位置検出装置に関する。
【背景技術】
【0002】
近年、コンピュータなどのポインティング入力装置として、人の手などの動きに対応した情報を入力するジェスチャー方式が注目されている。このジェスチャー方式を実現するためには、人の手などの平面的な広がりを持った物体の位置を非接触で検出する技術が必要になる。
【0003】
この種の技術の一例が特許文献1に記載されている。特許文献1に記載される変位測定装置では、対象物体の表面寸法よりも大きな広がりを有する光を投射する投光部と、対象物体からの反射光を集光する受光レンズと集光された反射光の結像位置近傍に置かれた位置検出素子とを有する受光部と、受光部からの出力に基づいて光の投射軸と直交する方向における対象物体の変位もしくは対象物体までの距離を演算する演算処理手段とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平4−307308号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の変位測定装置では、測定可能は移動物体の位置は、光の投射軸と直交する方向のうち特定の1次元の方向に限定される。このため、1台の装置では対象物体の2次元的な位置は検出できない。
【0006】
本発明の目的は、上述したような課題、すなわち対象物体の2次元的な位置を1台の装置で光学的に検出することは困難である、という課題を解決する光学的位置検出装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明の第1の光学的位置検出装置は、
光を照射する光照射部と、
対象物体からの反射光を受光する受光部とを有し、
上記受光部は、
受光面が2次元に分割された分割フォトダイオードと、
上記対象物体からの反射光を集光し上記分割フォトダイオードの受光面に上記対象物体の像を結像する受光レンズと、
上記分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、上記受光レンズの光軸と直交する2次元方向における上記対象物体の位置を検出する演算部と
を有する、といった構成を採る。
【発明の効果】
【0008】
本発明は上述したような構成を有するため、1台の装置で受光レンズの光軸と直交する2次元方向における対象物体の位置を光学的に検出することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1の実施形態のブロック図である。
【図2】本発明の第1の実施形態における演算部のブロック図である。
【図3】本発明の第1の実施形態における演算部の対数圧縮回路の構成例と赤外線発光ダイオードの駆動部の構成例とを示す回路図である。
【図4】本発明の第1の実施形態における演算部の演算回路の一例を示す回路図である。
【図5】本発明の第1の実施形態における演算部の演算回路の別の例を示す回路図である。
【図6】本発明の第1の実施形態における演算部の演算回路の他の例を示す回路図である。
【図7】本発明の第1の実施形態における演算部の演算回路の作用を説明するための回路図である。
【図8】本発明の第1の実施形態における演算部の演算回路の作用を説明するための回路図である。
【発明を実施するための形態】
【0010】
次に本発明の実施の形態について図面を参照して詳細に説明する。
[第1の実施形態]
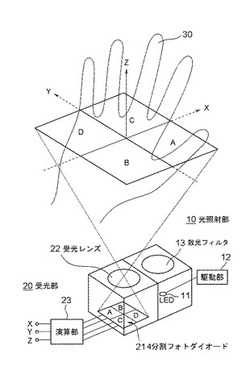
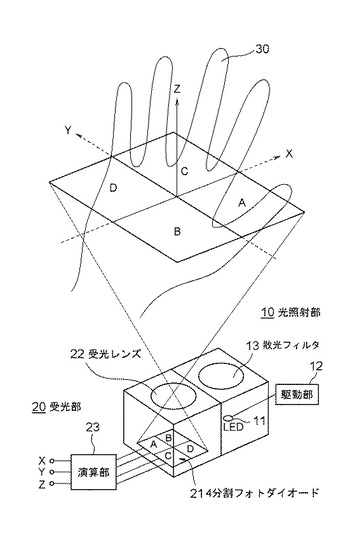
図1を参照すると、本発明の第1の実施形態にかかる光学的位置検出装置は、光を照射する光照射部10と、対象物体30からの反射光を受光する受光部20とから構成される。対象物体30は、位置検出の対象となる物体であり、本実施形態では人の手を対象物体としている。しかし、対象物体30は、人の手に限定されず、平面的な広がりを有する物体であれば他の物体、例えば人の指や棒状のスティックなどであってもよい。
【0011】
光照射部10は、赤外発光ダイオード11と、この赤外発光ダイオード11を断続的に駆動して赤外発光ダイオード11から赤外光をパルス的に出射させる駆動部12と、赤外発光ダイオード11から出射した赤外光を適当な広がりの拡散光に変換する散光フィルタ13とを有する。赤外発光ダイオード11の代わりに半導体レーザ素子のような他の種類の発光素子を使用してもよい。また、外光と区別できる環境ならば、赤外発光ダイオード11をパルス駆動せずに、連続駆動してもよい。
【0012】
受光部20は、受光面が2次元に分割された分割フォトダイオード21と、対象物体30からの反射光を集光し分割フォトダイオード21の受光面に対象物体30の像を結像する受光レンズ22と、演算部23とを有する。分割フォトダイオード21は、受光レンズ22から所定の距離を隔てた場所に、その受光面が受光レンズ22の光軸と直交する平面にほぼ平行になるように配置されている。また、分割フォトダイオード21の中心が受光レンズ22の光軸と交わるように配置されている。
【0013】
分割フォトダイオード21として、本実施形態では、4分割フォトダイオードを使用する。4分割フォトダイオード21は、受光面が2行2列に分割されており、分割された受光面の第1行第1列、第1行第2列、第2行第1列、第2行第2列の各々に対応するフォトダイオードの出力信号電流を独立に取り出すことができる。以下、分割された受光面の第1行第1列、第1行第2列、第2行第1列、第2行第2列の各々に対応するフォトダイオードの出力信号電流をA、B、C、Dと記載する。
【0014】
演算部23は、分割フォトダイオード21の出力信号電流A〜Dを入力し演算を施すことにより、受光レンズ22の光軸と直交する2次元方向における対象物体30の位置、および対象物体30までの距離を検出する機能を有する。本実施形態では、受光レンズ22の光軸をZ軸、4分割フォトダイオード21の受光面の中心から所定の距離L0にあるZ軸上の箇所を座標の原点O、4分割フォトダイオードの受光面を第1行と第2行とに分割する分割線に平行でZ軸に直交し原点Oを通る直線をX軸、4分割フォトダイオードの受光面を第1列と第2列とに分割する分割線に平行でZ軸に直交し原点Oを通る直線をY軸とする3次元座標系を使用する。
【0015】
受光レンズ22の光軸と直交する2次元方向における対象物体30の位置、すなわちX座標値とY座標値は、下記の式で与えられるような比率を分割フォトダイオード21の出力信号電流A〜Dに基づいて計算することで求めることができる。
X座標値=(A+C)/(A+B+C+D)−0.5 …(1)
Y座標値=(C+D)/(A+B+C+D)−0.5 …(2)
なお、上記のX座標値およびY座標値は、対象物体30の絶対位置ではなく相対位置である。
【0016】
対象物体30の重心が原点Oにある場合、A+B、C+D、A+C、B+Dのそれぞれは互いに等しくなるため、X座標値=0、Y座標値=0になる。対象物体30の重心がX軸の正方向に移動すると、A+CがB+Dより大きくなっていくので、X座標値は1/2に近づいていく。逆に、対象物体30の重心がX軸の負方向に移動すると、A+CがB+Dより小さくなっていくので、X座標値は-1/2に近づいていく。他方、対象物体30の重心がY軸の正方向に移動すると、C+DがA+Bより大きくなっていくので、Y座標値は1/2に近づいていく。逆に、対象物体30の重心がY軸の負方向に移動すると、C+DがA+Bより小さくなっていくので、X座標値は-1/2に近づいていく。
【0017】
対象物体30までの距離、すなわちZ座標値は、下記の式で与えられるような比率を分割フォトダイオード21の出力信号電流A〜Dに基づいて計算することで求めることができる。
Z座標値=TH/(A+B+C+D+TH)−0.5 …(3)
ここで、THは、対象物体30の重心が原点Oの箇所にあるときの分割フォトダイオード21の出力信号電流A〜Dの総和に等しい値である。また、上記のZ座標値は、対象物体30の絶対位置ではなく相対位置である。
【0018】
対象物体30の重心が原点Oにある場合、A+B+C+DはTHに等しくなるため、Z座標値=0になる。対象物体30の重心がZ軸の正方向に移動すると、すなわち対象物体30が遠ざかるとA+B+C+Dの値がTHより小さくなっていくので、Z座標値は1/2に近づいていく。逆に、対象物体30の重心がZ軸の負方向に移動すると、すなわち対象物体30が接近するとA+B+C+DがTHより大きくなっていくので、Z座標値は-1/2に近づいていく。
【0019】
上述した計算式(1)〜(3)では、−0.5の定数項を付加しているが、定数項の値をα、β、γ(0を含む予め定めれた定数)とした以下のような計算式(4)〜(6)を使用してもよい。
X座標値=(A+C)/(A+B+C+D)+α …(4)
Y座標値=(C+D)/(A+B+C+D)+β …(5)
Z座標値=TH/(A+B+C+D+TH)+γ …(6)
この場合、座標系は、α、β、γに相当する位置だけ上述した座標系をシフトしたものとなる。
【0020】
次に各部の詳細について説明する。
【0021】
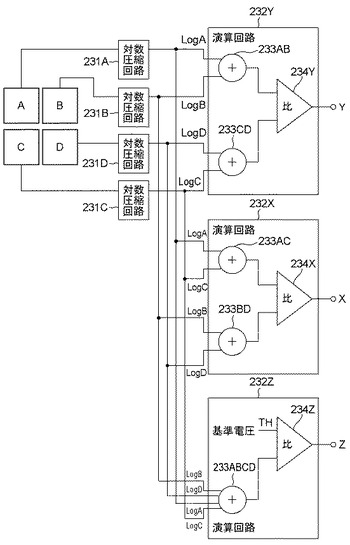
図2は演算部23のブロック図である。この例の演算部23は、分割フォトダイオード21の出力信号電流A〜Dを増幅した後に対数圧縮して電圧信号LogA〜LogDとして出力する対数圧縮回路231A〜231Dと、電圧信号LogA〜LogDを入力し上記式(4)で示される(A+C)/(A+B+C+D)をX座標値として出力する演算回路232Xと、電圧信号LogA〜LogDを入力し上記式(5)で示される(C+D)/(A+B+C+D)をY座標値として出力する演算回路232Yと、電圧信号LogA〜LogDと閾値THとを入力し上記式(6)で示されるTH/(A+B+C+D+TH)をZ座標値として出力する演算回路232Zとを有する。ここで、本明細書においてLogは自然対数を表している。
【0022】
演算回路232Xは、電圧信号LogAと電圧信号LogCとを入力として電圧信号Log(A+C)を出力する加算器233ACと、電圧信号LogBと電圧信号LogDとを入力として電圧信号Log(B+D)を出力する加算器233BDと、電圧信号Log(A+C)と電圧信号Log(B+D)とを入力して比(A+C)/(A+B+C+D)を出力する比演算器234Xとを有する。
【0023】
演算回路232Yは、電圧信号LogAと電圧信号LogBとを入力として電圧信号Log(A+B)を出力する加算器233ABと、電圧信号LogCと電圧信号LogDとを入力として電圧信号Log(C+D)を出力する加算器233CDと、電圧信号Log(A+B)と電圧信号Log(C+D)とを入力して比(C+D)/(A+B+C+D)を出力する比演算器234Yとを有する。
【0024】
演算回路232Zは、電圧信号LogA〜LogDを入力として電圧信号Log(A+B+C+D)を出力する加算器233ABCDと、電圧信号Log(A+B+C+D)と基準電圧THとを入力として比TH/(A+B+C+D+TH)を出力する比演算器234Zとを有する。
【0025】
図3は演算部23の対数圧縮回路231の構成例と赤外線発光ダイオード11の駆動部12の構成例とを示す回路図である。
【0026】
まず、駆動部12の回路について説明する。駆動部12は、赤外線発光ダイオード11に接続されたトランジスタQ21と抵抗R21とから構成される。トランジスタQ21のベースに加わる発光信号がパルス幅Tの時間だけHレベルになると、トランジスタQ21が時間Tだけオンになり、電源E21からの電流が抵抗R21およびトランジスタQ21を通じて赤外線発光ダイオード11に流れ、赤外光のパルスが放射される。
【0027】
次に対数圧縮回路231について説明する。図3には、図2に4つ存在する対数圧縮回路231A〜231Dのうちの対数圧縮回路231Aのみが示されている。他の対数圧縮回路231B〜231Dは対数圧縮回路231Aと全く同じ構成である。
【0028】
赤外線発光ダイオード11から出射し対象物体30で反射した赤外光および定常光は、分割フォトダイオード21で受光される。図3のフォトダイオード21Aは、分割フォトダイオード21の分割された受光面の各々に対応するフォトダイオードのうち出力信号電流Aを取り出しているフォトダイオードを示す。フォトダイオード21Aの出力信号電流Aのうち定常光電流はトランジスタQ22から供給され、信号光電流のみが演算増幅器A21に導かれる。演算増幅器A21により信号光電流が増幅され、その出力側に接続されたトランジスタQ23を通じて対数圧縮用ダイオードD21により対数圧縮される。対数圧縮用ダイオードD21で対数圧縮された信号は、ホロワA22を通じて対数圧縮回路231Aの出力電圧として演算回路232に出力される。
【0029】
出力信号電流Aのうち定常光電流のみがトランジスタQ22により引き抜かれる理由は次の通りである。まず、赤外線発光ダイオード11を発光させる前に、アナログスイッチSW21をホールド信号によりオンする。この状態で太陽光や蛍光灯などの定常光をフォトダイオード21Aで検知する。この検知による出力信号電流Aを演算増幅器A21で増幅しダイオードD21で対数圧縮した電圧は演算増幅器A23に導かれ、ダイオードD22の基準電圧との偏差信号に変換され、ホールドコンデンサC21を介してトランジスタQ22のベースに導かれる。演算増幅器A23の出力電圧は負帰還により定常光電流とトランジスタQ22のコレクタ電流とが釣り合うような値に設定され、これがホールドコンデンサC21により保持される。その後、アナログスイッチSW21をオフし、赤外線発光ダイオード11を発光させると、フォトダイオード21Aの出力電流のうち定常光電流のみが依然としてトランジスタQ22から供給されることになる。
【0030】
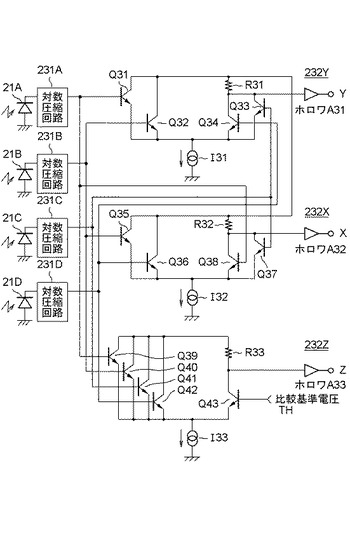
図4は演算部23の演算回路232の回路図である。図4のフォトダイオード21A〜21Dは、分割フォトダイオード21の分割された受光面の各々に対応するフォトダイオードのうち出力信号電流A〜Dを取り出しているフォトダイオードを示す。出力信号電流A〜Dは、対数圧縮回路231A〜231Dにより増幅された後に対数圧縮されて電圧信号LogA〜LogDとして演算回路232X、232Y、232に出力される。
【0031】
演算回路232Yは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogBが入力される2個のトランジスタQ31、Q32と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogC、LogDが入力される2個のトランジスタQ33、Q34と、これらのトランジスタQ31〜Q34のエミッタと接地との間に接続された定電流源I31と、トランジスタQ31、Q32のコレクトとトランジスタQ33、Q34のコレクタとの間に接続された抵抗R31と、トランジスタQ33、Q34のコレクタと抵抗R31との接続点からY座標値に関する出力を取り出すホロワA31とから構成されている。ここで、トランジスタQ31〜Q34は差動増幅器を構成する。
【0032】
演算回路232Xは、演算回路232Yと同様の回路構成を有する。具体的には、演算回路232Xは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogB、LogDが入力される2個のトランジスタQ35、Q36と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogCが入力される2個のトランジスタQ37、Q38と、これらのトランジスタQ35〜Q38のエミッタと接地との間に接続された定電流源I32と、トランジスタQ37、Q38のコレクトとトランジスタQ35、Q36のコレクタとの間に接続された抵抗R32と、トランジスタQ37、Q38のコレクタと抵抗R32との接続点からY座標値に関する出力を取り出すホロワA32とから構成されている。ここで、トランジスタQ35〜Q38は差動増幅器を構成する。
【0033】
また演算回路232YのトランジスタQ31、Q32のコレクタと演算回路232XのトランジスタQ35、Q36のコレクタとが接続されている。
【0034】
演算回路232Zは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA〜LogDが入力される4個のトランジスタQ39〜Q42と、これらのトランジスタQ39〜Q42のエミッタと接地との間に接続された定電流源I33と、エミッタが定電流源I33を介して接地され、コレクタが抵抗R33を通じてトランジスタQ39〜Q42のコレクタに接続され、ベースに基準電圧THが入力されるトランジスタQ43と、トランジスタQ43のコレクタと抵抗R33との接続点からZ座標値に関する出力を取り出すホロワA33とから構成されている。
【0035】
演算回路232Yにおいて、入力の4つの電圧信号LogA〜LogDから、出力Yとして(C+D)/(A+B+C+D)が生成される理由を、図7および図8を参照して説明する。
【0036】
図7の回路において、電流I1がダイオードD31に流れると、ダイオードD31のアノードの電圧は、カソードの電位(=Vref)に対し、VT・Log(I1/Io)(VTは=K・T/q、Kはボルツマン定数、Tは絶対温度、qは電子の電荷、Ioは逆方向飽和電流)で表わされる。ダイオードD31のアノードはトランジスタQ51のベースに接続されているため、トランジスタQ51のベースの電圧も、Vref+VT・Log(I1/Io)となる。同様にトランジスタQ52のベース電圧は、Vref+VT・Log(I2/Io)となる。
【0037】
トランジスタQ51、Q52のベースの電位差を、上記のダイオードD31、D32のアノードの電圧差から求めると、次式(7)で与えられる。
V(Q51)−V(Q52)
=(Vref+VT・Log(I1/Io))
−(Vref+VT・Log(I2/Io))
=VT・Log(I1/I2) …(7)
【0038】
他方、トランジスタQ51のコレクタ電流をIC1とすると、トランジスタQ51のベースエミッタ電圧は、VT・Log(IC1/Io)となる。同様に、トランジスタQ52のコレクタ電流をIC2とすると、トランジスタQ52のベースエミッタ電圧はVT・Log(IC2/Io)となる。故に、トランジスタQ51,Q52のベースエミッタ電圧差から求めた、トランジスタQ51、Q52のベース電圧の差は、次式(8)で与えられる。
V(Q51)−V(Q52)
=VT・(Log(IC1/Io)−Log(IC2/Io))
=VT・Log(IC1/IC2) …(8)
【0039】
上記の式(7)と式(8)とから、I1:I2=IC1:IC2の関係が成立することが判る。つまり、トランジスタQ51のコレクタ電流IC1は=バイアス電流I51・(I1/(I1+I2))となる。
【0040】
また、このときに、図7のOUT電圧は次式(9)で与えられる。
OUT電圧
=(Vref+VT・Log(I1/Io))−VT・Log(IC1/Io)
=(Vref+VT・Log(I1/Io))−VT・Log(I51・(I1/(I1+I2))/Io)
=Vref+VT・Log((I1+I2)/I51) …(9)
【0041】
一方、図8は、電流I1、I2を加算した後に対数圧縮して電圧に変換した信号をホロワを経て出力する回路である。この図8の回路におけるOUT電圧は、上記の式(9)で与えられることは明らかである。このことから、図7に示す回路は、信号を加算して対数圧縮した値を、各々の対数圧縮した値から演算によって等価的に作り出していることが判る。
【0042】
さて、図4の演算回路232Yにおいて、トランジスタQ31、Q32、Q33、Q34を流れる電流をIC(Q31)、IC(Q32)、IC(Q33)、IC(Q34)、フォトダイオード21A、21B、21C、21Dの信号電流をI(21A)、I(21B)、I(21C)、I(21D)と表記すると、図7および図8による説明から明らかなように、次の関係が成立する。
IC(Q31):IC(Q32):IC(Q33):IC(Q34)
=I(21A):I(21B):I(21C):I(21D) …(10)
【0043】
従って、演算回路232Yにおける抵抗R31の両端の電圧(すなわちホロワA31の出力Y)は、次式で与えられる。
抵抗R31の両端の電圧
=R31・I31(I(21C)+I(21D))/(I(21A)+I(21B)+I(21C)+I(21D)) …(11)
【0044】
以上が、演算回路232Yにおいて、入力の4つの電圧信号LogA〜LogDから、出力Yとして(C+D)/(A+B+C+D)が生成される理由である。
【0045】
演算回路232Xにおいて、入力の4つの電圧信号LogA〜LogDから、出力Xとして比(A+C)/(A+B+C+D)が生成される理由、および演算回路232Zにおいて、入力の4つの電圧信号LogA〜LogDと比較基準電圧THとから、出力ZとしてTH/(A+B+C+D+TH)が生成される理由は、演算回路232Yと同じである。
【0046】
図4の回路では、コレクタとエミッタどうしを接続してベースに違う電圧を印加したトランジスタを直接差動に使ったが、差動増幅器を別途備えるようにしても良い。図5はそのような手法による演算部23の演算回路232の回路図である。図5のフォトダイオード21A〜21Dは、分割フォトダイオード21の分割された受光面の各々に対応するフォトダイオードのうち出力信号電流A〜Dを取り出しているフォトダイオードを示す。出力信号電流A〜Dは、対数圧縮回路231A〜231Dにより増幅された後に対数圧縮されて電圧信号LogA〜LogDとして演算回路232X、232Y、232に出力される。
【0047】
演算回路232Yは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogBが入力される2個のトランジスタQ1、Q2と、これらのトランジスタQ1、Q2のエミッタと接地との間に接続された定電流源I1と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogC、LogDが入力される2個のトランジスタQ6、Q5と、これらのトランジスタQ5、Q6のエミッタと接地との間に接続された定電流源I2と、ベースがトランジスタQ1、Q2のエミッタに接続され、コレクタが抵抗器R1を介して接地され、エミッタに定電流源I3が接続されたトランジスタQ3と、ベースがトランジスタQ5、Q6のエミッタに接続され、コレクタが接地され、エミッタが定電流源I3に接続されたトランジスタQ4と、トランジスタQ3のコレクタと抵抗R1との接続点からY座標値に関する出力を取り出すホロワA1とから構成されている。ここで、トランジスタQ3、Q4と定電流源I3と抵抗R1とは差動増幅器を構成する。
【0048】
演算回路232Xは、演算回路232Yと同様の回路構成を有する。具体的には、演算回路232Xは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogB、LogDが入力される2個のトランジスタQ7、Q8と、これらのトランジスタQ7、Q8のエミッタと接地との間に接続された定電流源I4と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogCが入力される2個のトランジスタQ11、Q12と、これらのトランジスタQ11、Q12のエミッタと接地との間に接続された定電流源I5と、ベースがトランジスタQ7、Q8のエミッタに接続され、コレクタが抵抗器R2を介して接地され、エミッタに定電流源I6が接続されたトランジスタQ9と、ベースがトランジスタQ11、Q12のエミッタに接続され、コレクタが接地され、エミッタが定電流源I6に接続されたトランジスタQ10と、トランジスタQ9のコレクタと抵抗R2との接続点からX座標値に関する出力を取り出すホロワA2とから構成されている。
【0049】
また演算回路232YのトランジスタQ1、Q2、Q5、Q6のコレクタと演算回路232XのトランジスタQ7、Q8、Q11、Q12のコレクタとが接続されている。
【0050】
演算回路232Zは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA〜LogDが入力される4個のトランジスタQ13〜Q16と、これらのトランジスタQ13〜Q16のエミッタと接地との間に接続された定電流源I7と、エミッタが定電流源I8を介して設置され、コレクタがトランジスタQ13〜Q16のコレクタに接続され、ベースに基準電圧THが入力されるトランジスタQ19と、ベースがトランジスタQ13〜Q16のエミッタに接続され、コレクタが抵抗器R3を介して接地され、エミッタに定電流源I9が接続されたトランジスタQ17と、ベースがトランジスタQ19のエミッタに接続され、コレクタが接地され、エミッタが定電流源I9に接続されたトランジスタQ18と、トランジスタQ17のコレクタと抵抗R3との接続点からZ座標値に関する出力を取り出すホロワA3とから構成されている。ここで、トランジスタQ17、Q18と定電流源I9と抵抗R3とは差動増幅器を構成する。
【0051】
演算回路232Xにおいて、入力の4つの電圧信号LogA〜LogDから、出力Xとして(A+C)/(A+B+C+D)が生成される理由、演算回路232Yにおいて、入力の4つの電圧信号LogA〜LogDから、出力Yとして比(C+D)/(A+B+C+D)が生成される理由、および演算回路232Zにおいて、入力の4つの電圧信号LogA〜LogDと比較基準電圧THとから、出力ZとしてTH/(A+B+C+D+TH)が生成される理由は、図4に示す演算回路232Yと同じである。
【0052】
図5の差動増幅器を構成するトランジスタQ3、Q4、Q9、Q10、Q17、Q18はPNPトランジスタであるが、NPNトランジスタを使うことも可能である。その際の回路構成は図6に示すようになる。
【0053】
このように本実施形態によれば、1台の装置で受光レンズ22の光軸と直交する2次元方向(XY方向)における対象物体30の位置、および対象物体30までの距離(Z方向)を光学的に検出することができる。
【0054】
また特許文献1に記載する変位測定装置では、Z軸方向の変位を検出するためには、第1の受光レンズおよび位置検出素子と、第2の受光レンズおよび位置検出素子との2組の受光部を互いに離間して配置する必要があるために装置が大型化するが、本実施形態によれば1組の受光レンズ22および分割フォトダイオードで足りるため、装置の小型化が可能になる。
【0055】
[その他の実施形態]
以上本発明を幾つかの実施形態を挙げて説明したが、本発明は以上の実施形態にのみ限定されずその他各種の付加変更が可能である。例えば、上記の実施形態では4分割フォトダイオードを使用したが、直交する2組のフォトダイオードを構成できるならば分割数は任意でよい。例えば、直交する2組のフォトダイオードの1個のフォトダイオードをX軸Y軸の組み合わせの一つに共用することで、3分割フォトダイオードを使用することも可能である。また、分割フォトダイオードの形状は矩形に限定されず、各々の受光面が等しい形状であれば矩形以外の形状であっても良い。
【符号の説明】
【0056】
10…光照射部
11…赤外線発光ダイオード
12…駆動部
13…散光フィルタ
20…受光部
21…4分割フォトダイオード
22…受光レンズ
23…演算部
30…対象物体
【技術分野】
【0001】
本発明は、物体の位置を光学的に検出する光学的位置検出装置に関する。
【背景技術】
【0002】
近年、コンピュータなどのポインティング入力装置として、人の手などの動きに対応した情報を入力するジェスチャー方式が注目されている。このジェスチャー方式を実現するためには、人の手などの平面的な広がりを持った物体の位置を非接触で検出する技術が必要になる。
【0003】
この種の技術の一例が特許文献1に記載されている。特許文献1に記載される変位測定装置では、対象物体の表面寸法よりも大きな広がりを有する光を投射する投光部と、対象物体からの反射光を集光する受光レンズと集光された反射光の結像位置近傍に置かれた位置検出素子とを有する受光部と、受光部からの出力に基づいて光の投射軸と直交する方向における対象物体の変位もしくは対象物体までの距離を演算する演算処理手段とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平4−307308号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の変位測定装置では、測定可能は移動物体の位置は、光の投射軸と直交する方向のうち特定の1次元の方向に限定される。このため、1台の装置では対象物体の2次元的な位置は検出できない。
【0006】
本発明の目的は、上述したような課題、すなわち対象物体の2次元的な位置を1台の装置で光学的に検出することは困難である、という課題を解決する光学的位置検出装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明の第1の光学的位置検出装置は、
光を照射する光照射部と、
対象物体からの反射光を受光する受光部とを有し、
上記受光部は、
受光面が2次元に分割された分割フォトダイオードと、
上記対象物体からの反射光を集光し上記分割フォトダイオードの受光面に上記対象物体の像を結像する受光レンズと、
上記分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、上記受光レンズの光軸と直交する2次元方向における上記対象物体の位置を検出する演算部と
を有する、といった構成を採る。
【発明の効果】
【0008】
本発明は上述したような構成を有するため、1台の装置で受光レンズの光軸と直交する2次元方向における対象物体の位置を光学的に検出することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1の実施形態のブロック図である。
【図2】本発明の第1の実施形態における演算部のブロック図である。
【図3】本発明の第1の実施形態における演算部の対数圧縮回路の構成例と赤外線発光ダイオードの駆動部の構成例とを示す回路図である。
【図4】本発明の第1の実施形態における演算部の演算回路の一例を示す回路図である。
【図5】本発明の第1の実施形態における演算部の演算回路の別の例を示す回路図である。
【図6】本発明の第1の実施形態における演算部の演算回路の他の例を示す回路図である。
【図7】本発明の第1の実施形態における演算部の演算回路の作用を説明するための回路図である。
【図8】本発明の第1の実施形態における演算部の演算回路の作用を説明するための回路図である。
【発明を実施するための形態】
【0010】
次に本発明の実施の形態について図面を参照して詳細に説明する。
[第1の実施形態]
図1を参照すると、本発明の第1の実施形態にかかる光学的位置検出装置は、光を照射する光照射部10と、対象物体30からの反射光を受光する受光部20とから構成される。対象物体30は、位置検出の対象となる物体であり、本実施形態では人の手を対象物体としている。しかし、対象物体30は、人の手に限定されず、平面的な広がりを有する物体であれば他の物体、例えば人の指や棒状のスティックなどであってもよい。
【0011】
光照射部10は、赤外発光ダイオード11と、この赤外発光ダイオード11を断続的に駆動して赤外発光ダイオード11から赤外光をパルス的に出射させる駆動部12と、赤外発光ダイオード11から出射した赤外光を適当な広がりの拡散光に変換する散光フィルタ13とを有する。赤外発光ダイオード11の代わりに半導体レーザ素子のような他の種類の発光素子を使用してもよい。また、外光と区別できる環境ならば、赤外発光ダイオード11をパルス駆動せずに、連続駆動してもよい。
【0012】
受光部20は、受光面が2次元に分割された分割フォトダイオード21と、対象物体30からの反射光を集光し分割フォトダイオード21の受光面に対象物体30の像を結像する受光レンズ22と、演算部23とを有する。分割フォトダイオード21は、受光レンズ22から所定の距離を隔てた場所に、その受光面が受光レンズ22の光軸と直交する平面にほぼ平行になるように配置されている。また、分割フォトダイオード21の中心が受光レンズ22の光軸と交わるように配置されている。
【0013】
分割フォトダイオード21として、本実施形態では、4分割フォトダイオードを使用する。4分割フォトダイオード21は、受光面が2行2列に分割されており、分割された受光面の第1行第1列、第1行第2列、第2行第1列、第2行第2列の各々に対応するフォトダイオードの出力信号電流を独立に取り出すことができる。以下、分割された受光面の第1行第1列、第1行第2列、第2行第1列、第2行第2列の各々に対応するフォトダイオードの出力信号電流をA、B、C、Dと記載する。
【0014】
演算部23は、分割フォトダイオード21の出力信号電流A〜Dを入力し演算を施すことにより、受光レンズ22の光軸と直交する2次元方向における対象物体30の位置、および対象物体30までの距離を検出する機能を有する。本実施形態では、受光レンズ22の光軸をZ軸、4分割フォトダイオード21の受光面の中心から所定の距離L0にあるZ軸上の箇所を座標の原点O、4分割フォトダイオードの受光面を第1行と第2行とに分割する分割線に平行でZ軸に直交し原点Oを通る直線をX軸、4分割フォトダイオードの受光面を第1列と第2列とに分割する分割線に平行でZ軸に直交し原点Oを通る直線をY軸とする3次元座標系を使用する。
【0015】
受光レンズ22の光軸と直交する2次元方向における対象物体30の位置、すなわちX座標値とY座標値は、下記の式で与えられるような比率を分割フォトダイオード21の出力信号電流A〜Dに基づいて計算することで求めることができる。
X座標値=(A+C)/(A+B+C+D)−0.5 …(1)
Y座標値=(C+D)/(A+B+C+D)−0.5 …(2)
なお、上記のX座標値およびY座標値は、対象物体30の絶対位置ではなく相対位置である。
【0016】
対象物体30の重心が原点Oにある場合、A+B、C+D、A+C、B+Dのそれぞれは互いに等しくなるため、X座標値=0、Y座標値=0になる。対象物体30の重心がX軸の正方向に移動すると、A+CがB+Dより大きくなっていくので、X座標値は1/2に近づいていく。逆に、対象物体30の重心がX軸の負方向に移動すると、A+CがB+Dより小さくなっていくので、X座標値は-1/2に近づいていく。他方、対象物体30の重心がY軸の正方向に移動すると、C+DがA+Bより大きくなっていくので、Y座標値は1/2に近づいていく。逆に、対象物体30の重心がY軸の負方向に移動すると、C+DがA+Bより小さくなっていくので、X座標値は-1/2に近づいていく。
【0017】
対象物体30までの距離、すなわちZ座標値は、下記の式で与えられるような比率を分割フォトダイオード21の出力信号電流A〜Dに基づいて計算することで求めることができる。
Z座標値=TH/(A+B+C+D+TH)−0.5 …(3)
ここで、THは、対象物体30の重心が原点Oの箇所にあるときの分割フォトダイオード21の出力信号電流A〜Dの総和に等しい値である。また、上記のZ座標値は、対象物体30の絶対位置ではなく相対位置である。
【0018】
対象物体30の重心が原点Oにある場合、A+B+C+DはTHに等しくなるため、Z座標値=0になる。対象物体30の重心がZ軸の正方向に移動すると、すなわち対象物体30が遠ざかるとA+B+C+Dの値がTHより小さくなっていくので、Z座標値は1/2に近づいていく。逆に、対象物体30の重心がZ軸の負方向に移動すると、すなわち対象物体30が接近するとA+B+C+DがTHより大きくなっていくので、Z座標値は-1/2に近づいていく。
【0019】
上述した計算式(1)〜(3)では、−0.5の定数項を付加しているが、定数項の値をα、β、γ(0を含む予め定めれた定数)とした以下のような計算式(4)〜(6)を使用してもよい。
X座標値=(A+C)/(A+B+C+D)+α …(4)
Y座標値=(C+D)/(A+B+C+D)+β …(5)
Z座標値=TH/(A+B+C+D+TH)+γ …(6)
この場合、座標系は、α、β、γに相当する位置だけ上述した座標系をシフトしたものとなる。
【0020】
次に各部の詳細について説明する。
【0021】
図2は演算部23のブロック図である。この例の演算部23は、分割フォトダイオード21の出力信号電流A〜Dを増幅した後に対数圧縮して電圧信号LogA〜LogDとして出力する対数圧縮回路231A〜231Dと、電圧信号LogA〜LogDを入力し上記式(4)で示される(A+C)/(A+B+C+D)をX座標値として出力する演算回路232Xと、電圧信号LogA〜LogDを入力し上記式(5)で示される(C+D)/(A+B+C+D)をY座標値として出力する演算回路232Yと、電圧信号LogA〜LogDと閾値THとを入力し上記式(6)で示されるTH/(A+B+C+D+TH)をZ座標値として出力する演算回路232Zとを有する。ここで、本明細書においてLogは自然対数を表している。
【0022】
演算回路232Xは、電圧信号LogAと電圧信号LogCとを入力として電圧信号Log(A+C)を出力する加算器233ACと、電圧信号LogBと電圧信号LogDとを入力として電圧信号Log(B+D)を出力する加算器233BDと、電圧信号Log(A+C)と電圧信号Log(B+D)とを入力して比(A+C)/(A+B+C+D)を出力する比演算器234Xとを有する。
【0023】
演算回路232Yは、電圧信号LogAと電圧信号LogBとを入力として電圧信号Log(A+B)を出力する加算器233ABと、電圧信号LogCと電圧信号LogDとを入力として電圧信号Log(C+D)を出力する加算器233CDと、電圧信号Log(A+B)と電圧信号Log(C+D)とを入力して比(C+D)/(A+B+C+D)を出力する比演算器234Yとを有する。
【0024】
演算回路232Zは、電圧信号LogA〜LogDを入力として電圧信号Log(A+B+C+D)を出力する加算器233ABCDと、電圧信号Log(A+B+C+D)と基準電圧THとを入力として比TH/(A+B+C+D+TH)を出力する比演算器234Zとを有する。
【0025】
図3は演算部23の対数圧縮回路231の構成例と赤外線発光ダイオード11の駆動部12の構成例とを示す回路図である。
【0026】
まず、駆動部12の回路について説明する。駆動部12は、赤外線発光ダイオード11に接続されたトランジスタQ21と抵抗R21とから構成される。トランジスタQ21のベースに加わる発光信号がパルス幅Tの時間だけHレベルになると、トランジスタQ21が時間Tだけオンになり、電源E21からの電流が抵抗R21およびトランジスタQ21を通じて赤外線発光ダイオード11に流れ、赤外光のパルスが放射される。
【0027】
次に対数圧縮回路231について説明する。図3には、図2に4つ存在する対数圧縮回路231A〜231Dのうちの対数圧縮回路231Aのみが示されている。他の対数圧縮回路231B〜231Dは対数圧縮回路231Aと全く同じ構成である。
【0028】
赤外線発光ダイオード11から出射し対象物体30で反射した赤外光および定常光は、分割フォトダイオード21で受光される。図3のフォトダイオード21Aは、分割フォトダイオード21の分割された受光面の各々に対応するフォトダイオードのうち出力信号電流Aを取り出しているフォトダイオードを示す。フォトダイオード21Aの出力信号電流Aのうち定常光電流はトランジスタQ22から供給され、信号光電流のみが演算増幅器A21に導かれる。演算増幅器A21により信号光電流が増幅され、その出力側に接続されたトランジスタQ23を通じて対数圧縮用ダイオードD21により対数圧縮される。対数圧縮用ダイオードD21で対数圧縮された信号は、ホロワA22を通じて対数圧縮回路231Aの出力電圧として演算回路232に出力される。
【0029】
出力信号電流Aのうち定常光電流のみがトランジスタQ22により引き抜かれる理由は次の通りである。まず、赤外線発光ダイオード11を発光させる前に、アナログスイッチSW21をホールド信号によりオンする。この状態で太陽光や蛍光灯などの定常光をフォトダイオード21Aで検知する。この検知による出力信号電流Aを演算増幅器A21で増幅しダイオードD21で対数圧縮した電圧は演算増幅器A23に導かれ、ダイオードD22の基準電圧との偏差信号に変換され、ホールドコンデンサC21を介してトランジスタQ22のベースに導かれる。演算増幅器A23の出力電圧は負帰還により定常光電流とトランジスタQ22のコレクタ電流とが釣り合うような値に設定され、これがホールドコンデンサC21により保持される。その後、アナログスイッチSW21をオフし、赤外線発光ダイオード11を発光させると、フォトダイオード21Aの出力電流のうち定常光電流のみが依然としてトランジスタQ22から供給されることになる。
【0030】
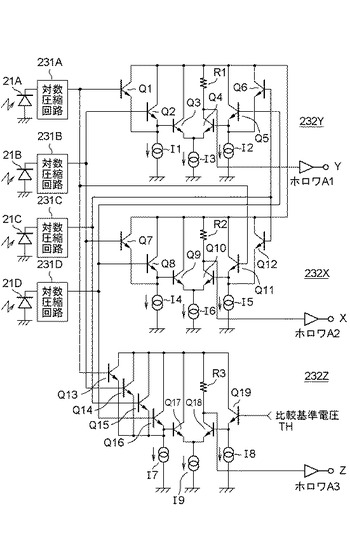
図4は演算部23の演算回路232の回路図である。図4のフォトダイオード21A〜21Dは、分割フォトダイオード21の分割された受光面の各々に対応するフォトダイオードのうち出力信号電流A〜Dを取り出しているフォトダイオードを示す。出力信号電流A〜Dは、対数圧縮回路231A〜231Dにより増幅された後に対数圧縮されて電圧信号LogA〜LogDとして演算回路232X、232Y、232に出力される。
【0031】
演算回路232Yは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogBが入力される2個のトランジスタQ31、Q32と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogC、LogDが入力される2個のトランジスタQ33、Q34と、これらのトランジスタQ31〜Q34のエミッタと接地との間に接続された定電流源I31と、トランジスタQ31、Q32のコレクトとトランジスタQ33、Q34のコレクタとの間に接続された抵抗R31と、トランジスタQ33、Q34のコレクタと抵抗R31との接続点からY座標値に関する出力を取り出すホロワA31とから構成されている。ここで、トランジスタQ31〜Q34は差動増幅器を構成する。
【0032】
演算回路232Xは、演算回路232Yと同様の回路構成を有する。具体的には、演算回路232Xは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogB、LogDが入力される2個のトランジスタQ35、Q36と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogCが入力される2個のトランジスタQ37、Q38と、これらのトランジスタQ35〜Q38のエミッタと接地との間に接続された定電流源I32と、トランジスタQ37、Q38のコレクトとトランジスタQ35、Q36のコレクタとの間に接続された抵抗R32と、トランジスタQ37、Q38のコレクタと抵抗R32との接続点からY座標値に関する出力を取り出すホロワA32とから構成されている。ここで、トランジスタQ35〜Q38は差動増幅器を構成する。
【0033】
また演算回路232YのトランジスタQ31、Q32のコレクタと演算回路232XのトランジスタQ35、Q36のコレクタとが接続されている。
【0034】
演算回路232Zは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA〜LogDが入力される4個のトランジスタQ39〜Q42と、これらのトランジスタQ39〜Q42のエミッタと接地との間に接続された定電流源I33と、エミッタが定電流源I33を介して接地され、コレクタが抵抗R33を通じてトランジスタQ39〜Q42のコレクタに接続され、ベースに基準電圧THが入力されるトランジスタQ43と、トランジスタQ43のコレクタと抵抗R33との接続点からZ座標値に関する出力を取り出すホロワA33とから構成されている。
【0035】
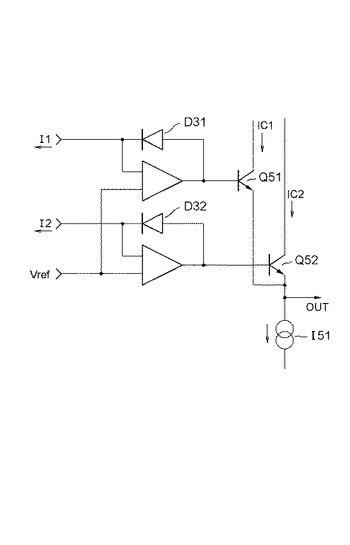
演算回路232Yにおいて、入力の4つの電圧信号LogA〜LogDから、出力Yとして(C+D)/(A+B+C+D)が生成される理由を、図7および図8を参照して説明する。
【0036】
図7の回路において、電流I1がダイオードD31に流れると、ダイオードD31のアノードの電圧は、カソードの電位(=Vref)に対し、VT・Log(I1/Io)(VTは=K・T/q、Kはボルツマン定数、Tは絶対温度、qは電子の電荷、Ioは逆方向飽和電流)で表わされる。ダイオードD31のアノードはトランジスタQ51のベースに接続されているため、トランジスタQ51のベースの電圧も、Vref+VT・Log(I1/Io)となる。同様にトランジスタQ52のベース電圧は、Vref+VT・Log(I2/Io)となる。
【0037】
トランジスタQ51、Q52のベースの電位差を、上記のダイオードD31、D32のアノードの電圧差から求めると、次式(7)で与えられる。
V(Q51)−V(Q52)
=(Vref+VT・Log(I1/Io))
−(Vref+VT・Log(I2/Io))
=VT・Log(I1/I2) …(7)
【0038】
他方、トランジスタQ51のコレクタ電流をIC1とすると、トランジスタQ51のベースエミッタ電圧は、VT・Log(IC1/Io)となる。同様に、トランジスタQ52のコレクタ電流をIC2とすると、トランジスタQ52のベースエミッタ電圧はVT・Log(IC2/Io)となる。故に、トランジスタQ51,Q52のベースエミッタ電圧差から求めた、トランジスタQ51、Q52のベース電圧の差は、次式(8)で与えられる。
V(Q51)−V(Q52)
=VT・(Log(IC1/Io)−Log(IC2/Io))
=VT・Log(IC1/IC2) …(8)
【0039】
上記の式(7)と式(8)とから、I1:I2=IC1:IC2の関係が成立することが判る。つまり、トランジスタQ51のコレクタ電流IC1は=バイアス電流I51・(I1/(I1+I2))となる。
【0040】
また、このときに、図7のOUT電圧は次式(9)で与えられる。
OUT電圧
=(Vref+VT・Log(I1/Io))−VT・Log(IC1/Io)
=(Vref+VT・Log(I1/Io))−VT・Log(I51・(I1/(I1+I2))/Io)
=Vref+VT・Log((I1+I2)/I51) …(9)
【0041】
一方、図8は、電流I1、I2を加算した後に対数圧縮して電圧に変換した信号をホロワを経て出力する回路である。この図8の回路におけるOUT電圧は、上記の式(9)で与えられることは明らかである。このことから、図7に示す回路は、信号を加算して対数圧縮した値を、各々の対数圧縮した値から演算によって等価的に作り出していることが判る。
【0042】
さて、図4の演算回路232Yにおいて、トランジスタQ31、Q32、Q33、Q34を流れる電流をIC(Q31)、IC(Q32)、IC(Q33)、IC(Q34)、フォトダイオード21A、21B、21C、21Dの信号電流をI(21A)、I(21B)、I(21C)、I(21D)と表記すると、図7および図8による説明から明らかなように、次の関係が成立する。
IC(Q31):IC(Q32):IC(Q33):IC(Q34)
=I(21A):I(21B):I(21C):I(21D) …(10)
【0043】
従って、演算回路232Yにおける抵抗R31の両端の電圧(すなわちホロワA31の出力Y)は、次式で与えられる。
抵抗R31の両端の電圧
=R31・I31(I(21C)+I(21D))/(I(21A)+I(21B)+I(21C)+I(21D)) …(11)
【0044】
以上が、演算回路232Yにおいて、入力の4つの電圧信号LogA〜LogDから、出力Yとして(C+D)/(A+B+C+D)が生成される理由である。
【0045】
演算回路232Xにおいて、入力の4つの電圧信号LogA〜LogDから、出力Xとして比(A+C)/(A+B+C+D)が生成される理由、および演算回路232Zにおいて、入力の4つの電圧信号LogA〜LogDと比較基準電圧THとから、出力ZとしてTH/(A+B+C+D+TH)が生成される理由は、演算回路232Yと同じである。
【0046】
図4の回路では、コレクタとエミッタどうしを接続してベースに違う電圧を印加したトランジスタを直接差動に使ったが、差動増幅器を別途備えるようにしても良い。図5はそのような手法による演算部23の演算回路232の回路図である。図5のフォトダイオード21A〜21Dは、分割フォトダイオード21の分割された受光面の各々に対応するフォトダイオードのうち出力信号電流A〜Dを取り出しているフォトダイオードを示す。出力信号電流A〜Dは、対数圧縮回路231A〜231Dにより増幅された後に対数圧縮されて電圧信号LogA〜LogDとして演算回路232X、232Y、232に出力される。
【0047】
演算回路232Yは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogBが入力される2個のトランジスタQ1、Q2と、これらのトランジスタQ1、Q2のエミッタと接地との間に接続された定電流源I1と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogC、LogDが入力される2個のトランジスタQ6、Q5と、これらのトランジスタQ5、Q6のエミッタと接地との間に接続された定電流源I2と、ベースがトランジスタQ1、Q2のエミッタに接続され、コレクタが抵抗器R1を介して接地され、エミッタに定電流源I3が接続されたトランジスタQ3と、ベースがトランジスタQ5、Q6のエミッタに接続され、コレクタが接地され、エミッタが定電流源I3に接続されたトランジスタQ4と、トランジスタQ3のコレクタと抵抗R1との接続点からY座標値に関する出力を取り出すホロワA1とから構成されている。ここで、トランジスタQ3、Q4と定電流源I3と抵抗R1とは差動増幅器を構成する。
【0048】
演算回路232Xは、演算回路232Yと同様の回路構成を有する。具体的には、演算回路232Xは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogB、LogDが入力される2個のトランジスタQ7、Q8と、これらのトランジスタQ7、Q8のエミッタと接地との間に接続された定電流源I4と、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA、LogCが入力される2個のトランジスタQ11、Q12と、これらのトランジスタQ11、Q12のエミッタと接地との間に接続された定電流源I5と、ベースがトランジスタQ7、Q8のエミッタに接続され、コレクタが抵抗器R2を介して接地され、エミッタに定電流源I6が接続されたトランジスタQ9と、ベースがトランジスタQ11、Q12のエミッタに接続され、コレクタが接地され、エミッタが定電流源I6に接続されたトランジスタQ10と、トランジスタQ9のコレクタと抵抗R2との接続点からX座標値に関する出力を取り出すホロワA2とから構成されている。
【0049】
また演算回路232YのトランジスタQ1、Q2、Q5、Q6のコレクタと演算回路232XのトランジスタQ7、Q8、Q11、Q12のコレクタとが接続されている。
【0050】
演算回路232Zは、エミッタどうし及びコレクタどうしが互いに接続され、ベースに電圧信号LogA〜LogDが入力される4個のトランジスタQ13〜Q16と、これらのトランジスタQ13〜Q16のエミッタと接地との間に接続された定電流源I7と、エミッタが定電流源I8を介して設置され、コレクタがトランジスタQ13〜Q16のコレクタに接続され、ベースに基準電圧THが入力されるトランジスタQ19と、ベースがトランジスタQ13〜Q16のエミッタに接続され、コレクタが抵抗器R3を介して接地され、エミッタに定電流源I9が接続されたトランジスタQ17と、ベースがトランジスタQ19のエミッタに接続され、コレクタが接地され、エミッタが定電流源I9に接続されたトランジスタQ18と、トランジスタQ17のコレクタと抵抗R3との接続点からZ座標値に関する出力を取り出すホロワA3とから構成されている。ここで、トランジスタQ17、Q18と定電流源I9と抵抗R3とは差動増幅器を構成する。
【0051】
演算回路232Xにおいて、入力の4つの電圧信号LogA〜LogDから、出力Xとして(A+C)/(A+B+C+D)が生成される理由、演算回路232Yにおいて、入力の4つの電圧信号LogA〜LogDから、出力Yとして比(C+D)/(A+B+C+D)が生成される理由、および演算回路232Zにおいて、入力の4つの電圧信号LogA〜LogDと比較基準電圧THとから、出力ZとしてTH/(A+B+C+D+TH)が生成される理由は、図4に示す演算回路232Yと同じである。
【0052】
図5の差動増幅器を構成するトランジスタQ3、Q4、Q9、Q10、Q17、Q18はPNPトランジスタであるが、NPNトランジスタを使うことも可能である。その際の回路構成は図6に示すようになる。
【0053】
このように本実施形態によれば、1台の装置で受光レンズ22の光軸と直交する2次元方向(XY方向)における対象物体30の位置、および対象物体30までの距離(Z方向)を光学的に検出することができる。
【0054】
また特許文献1に記載する変位測定装置では、Z軸方向の変位を検出するためには、第1の受光レンズおよび位置検出素子と、第2の受光レンズおよび位置検出素子との2組の受光部を互いに離間して配置する必要があるために装置が大型化するが、本実施形態によれば1組の受光レンズ22および分割フォトダイオードで足りるため、装置の小型化が可能になる。
【0055】
[その他の実施形態]
以上本発明を幾つかの実施形態を挙げて説明したが、本発明は以上の実施形態にのみ限定されずその他各種の付加変更が可能である。例えば、上記の実施形態では4分割フォトダイオードを使用したが、直交する2組のフォトダイオードを構成できるならば分割数は任意でよい。例えば、直交する2組のフォトダイオードの1個のフォトダイオードをX軸Y軸の組み合わせの一つに共用することで、3分割フォトダイオードを使用することも可能である。また、分割フォトダイオードの形状は矩形に限定されず、各々の受光面が等しい形状であれば矩形以外の形状であっても良い。
【符号の説明】
【0056】
10…光照射部
11…赤外線発光ダイオード
12…駆動部
13…散光フィルタ
20…受光部
21…4分割フォトダイオード
22…受光レンズ
23…演算部
30…対象物体
【特許請求の範囲】
【請求項1】
光を照射する光照射部と、
対象物体からの反射光を受光する受光部とを有し、
前記受光部は、
受光面が2次元に分割された分割フォトダイオードと、
前記対象物体からの反射光を集光し前記分割フォトダイオードの受光面に前記対象物体の像を結像する受光レンズと、
前記分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、前記受光レンズの光軸と直交する2次元方向における前記対象物体の位置を検出する演算部と
を有することを特徴とする光学的位置検出装置。
【請求項2】
前記分割フォトダイオードとして、受光面が4個の分割領域に分割されたフォトダイオードを使用し、
前記演算部は、
全出力信号電流の和に占める、前記4個の分割領域のうち特定の分割領域と当該特定の分割領域に隣接する分割領域とに対応する2個のフォトダイオードの出力信号電流の和の割合を、X軸方向における前記対象物体の位置として算出し、
全出力信号電流の和に占める、前記4個の分割領域のうち前記特定の分割領域と前記特定の分割領域に隣接する前記分割領域との並びに直交する並びの2つの分割領域に対応する2個のフォトダイオードの出力信号電流の和の割合を、Y軸方向における前記対象物体の位置として検出する請求項1に記載の光学的位置検出装置。
【請求項3】
前記演算部は、さらに、予め定められた基準値に対する、前記分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流の和の割合を、前記2次元方向と直交する方向における前記対象物体の位置として検出する請求項1または2に記載の光学的位置検出装置。
【請求項4】
前記演算部における複数のフォトダイオードの出力信号電流の和は、ダイオード特性によって対数圧縮されたそれぞれの前記フォトダイオードの出力信号電流に依存する電圧を、エミッタどうし及びコレクタどうしが互いに接続されてベースに各フォトダイオードに起因する対数圧縮電圧が入力された複数のトランジスタによって演算される請求項2または3に記載の光学的位置検出装置。
【請求項1】
光を照射する光照射部と、
対象物体からの反射光を受光する受光部とを有し、
前記受光部は、
受光面が2次元に分割された分割フォトダイオードと、
前記対象物体からの反射光を集光し前記分割フォトダイオードの受光面に前記対象物体の像を結像する受光レンズと、
前記分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、前記受光レンズの光軸と直交する2次元方向における前記対象物体の位置を検出する演算部と
を有することを特徴とする光学的位置検出装置。
【請求項2】
前記分割フォトダイオードとして、受光面が4個の分割領域に分割されたフォトダイオードを使用し、
前記演算部は、
全出力信号電流の和に占める、前記4個の分割領域のうち特定の分割領域と当該特定の分割領域に隣接する分割領域とに対応する2個のフォトダイオードの出力信号電流の和の割合を、X軸方向における前記対象物体の位置として算出し、
全出力信号電流の和に占める、前記4個の分割領域のうち前記特定の分割領域と前記特定の分割領域に隣接する前記分割領域との並びに直交する並びの2つの分割領域に対応する2個のフォトダイオードの出力信号電流の和の割合を、Y軸方向における前記対象物体の位置として検出する請求項1に記載の光学的位置検出装置。
【請求項3】
前記演算部は、さらに、予め定められた基準値に対する、前記分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流の和の割合を、前記2次元方向と直交する方向における前記対象物体の位置として検出する請求項1または2に記載の光学的位置検出装置。
【請求項4】
前記演算部における複数のフォトダイオードの出力信号電流の和は、ダイオード特性によって対数圧縮されたそれぞれの前記フォトダイオードの出力信号電流に依存する電圧を、エミッタどうし及びコレクタどうしが互いに接続されてベースに各フォトダイオードに起因する対数圧縮電圧が入力された複数のトランジスタによって演算される請求項2または3に記載の光学的位置検出装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−88122(P2013−88122A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−225692(P2011−225692)
【出願日】平成23年10月13日(2011.10.13)
【出願人】(593046197)シリンクス株式会社 (3)
【出願人】(591128453)株式会社メガチップス (322)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月13日(2011.10.13)
【出願人】(593046197)シリンクス株式会社 (3)
【出願人】(591128453)株式会社メガチップス (322)
【Fターム(参考)】
[ Back to top ]