
Fターム[2F065FF43]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 反射、散乱光の分布 (3,485) | 方向 (825)
Fターム[2F065FF43]の下位に属するFターム
特定方向の光量 (702)
Fターム[2F065FF43]に分類される特許
1 - 20 / 123
レーザトラッカー
車体寸法計測装置及び車体寸法計測方法
曲げ加工装置及び曲げ加工方法
【課題】高精度な曲げ加工を可能にする。
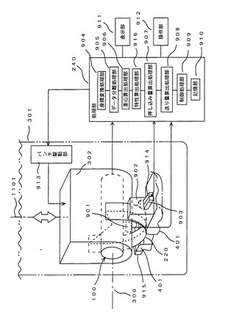
【解決手段】1対のダイ401、402上に被加工物220を載置し、パンチ302の押し込み量に応じた負荷を被加工物220の複数の曲げ加工位置に加えることによって被加工物220を所定形状に曲げ加工する際に、被加工物220の形状に関連するデータを光学式測定装置本体100で測定し、記憶部910に記憶した被加工物220の目標曲げ量を参照して、前記測定した形状に関連するデータに基づいて次回の曲げ加工におけるパンチ302の押し込み量を決定し、パンチ駆動部3が次回の曲げ加工においてパンチ302が前記押し込み量に対応する負荷を被加工物220へ加えるように処理部が制御する。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置

【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
光学的位置検出装置
【課題】対象物体の2次元的な位置を1台の装置で光学的に検出することは困難であること。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
ステレオカメラの取り付け調整方法及びステレオカメラ
【課題】ステレオカメラを自動車等に取り付ける際に、該ステレオカメラの校正距離方向と目的距離方向の調整を容易に行えるようにする。
【解決手段】ステレオカメラ10を自動車40に取り付けて、自動車の直進方向の距離を測定するものとする。ステレオカメラ10は複数の単眼カメラを筐体内に備え、筐体前面を筐体基準面とし、該筐体基準面は反射面を有している。車外に設置されたレーザ光源50の出射光軸と自動車40の直進方向が平行になるように調整した後、レーザ光源50からの出射光をステレオカメラ10の筐体基準面で反射させて、反射光が出射光位置に戻るように、ステレオカメラ10の取り付け姿勢を調整する。
(もっと読む)
6軸測定系の原点出し用治具及び原点出し方法並びに固体撮像素子の相対位置調整方法
【課題】 原点出し用治具の設置再現性の問題を解決すると共に、原点出しを簡易にする。
【解決手段】 被測定対象物の煽り、高さ並びに平面位置及び平面回転位置の6軸を同時に検出できる6軸測定装置を用いて、6軸基準位置を設定するための原点出し用治具1であり、治具本体1aの面に、煽りの原点出しのための鏡面加工された第1の加工部2、高さの原点出しのための凹状の第2の加工部3並びに平面位置及び平面回転位置の原点出しのための穴状の第3の加工部4,5を設け、治具本体1aにはこの治具本体原点位置を位置決めするための穴からなる位置決め部6,7を設けてある。
(もっと読む)
光源装置、光学式位置検出装置、および入力機能付き表示システム
【課題】光軸方向に交差する方向に配列した複数の発光素子から光軸方向と配列方向とによって規定される仮想面に沿って光を出射した場合でも、発光素子の配列方向で光強度が急激に変化しない光源装置、光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10に用いた光源部12(光源装置)では、複数の発光素子120を発光素子120の光軸に交差する方向に配列したため、光軸方向と配列方向とによって規定されるXY面(仮想面)に沿う広い範囲にわたって検出光L2を十分な強度をもって出射することができる。複数の発光素子120の光軸方向の出射側には、レンズフィルム190(シート状光学部材)が配置されており、かかるレンズフィルム190は、XY面内方向における発光素子120からの出射光L1の発散角を拡大させるパワーを備え、Z軸方向には光を拡散させるパワーを有していない。
(もっと読む)
表面形状測定装置
【課題】表面形状測定装置の配線系統をできるだけ省き、装置の簡素化を図る。
【解決手段】表面形状測定装置10は、測定対象物12の表面に光を照射する光源14と、測定対象物12の表面上の反射点P1からの反射光を第一の反射光と第二の反射光に分離するビームスプリッタ18と、第一の反射光を反射する第一のミラー20と、第二の反射光を反射する第二のミラー22と、を備えている。さらに、第一のミラー20から反射した第一の反射光及び第二のミラー20から反射した第二の反射光を受光する撮像面30を備える撮像器24を備えている。この撮像器24は、ビームスプリッタ18から第一のミラー20を経由して撮像面30まで到る光路長とビームスプリッタ18から第二のミラー22を経由して撮像面30まで到る光路長とが異なるように配置されている。
(もっと読む)
3次元計測装置、および3次元計測方法
【課題】偏光解析を用いながら、複数の傾斜面の各傾斜方向の違いを識別できる3次元計測装置、および3次元計測方法を提供する。
【解決手段】3次元演算部4の傾斜算出部41は、ワーク台座6によってカメラ3の撮像方向とワークWの表面との相対角度を第1の状態に設定してカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第1の傾斜角および第1の方位角を求め、ワーク台座6によって相対角度を第1の状態から第2の状態に変化させた後にカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第2の傾斜角および第2の方位角を求め、傾斜補正部42は、第1の傾斜角と第2の傾斜角との差に基づいて、第1の傾斜角または第1の方位角を補正する。
(もっと読む)
リソグラフィ装置のためのレベルセンサの構成及びデバイス製造方法
【課題】改良されたレベルセンサを提供する。
【解決手段】レベルセンサはリソグラフィ装置において基板表面高さを測定する。レベルセンサには、検出用の放射を基板に発する光源と、基板から反射された放射を測定するための検出器ユニットと、が設けられている。光源は、リソグラフィ装置において基板を処理するために使用されるレジストが反応する波長域の検出用放射を発する。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
不良検出システムの改良
【課題】パターンを形成したウェハの検査において、表面の内部もしくは表面上の異常の有無を判定できる表面検査法を提供する。
【解決手段】サンプル表面20aからの散乱光は表面20aに対して垂直な線に対して略対称の光を集束する集束器38,52によって集束される。集束光は、異なる方位角で経路へと導かれ、集束した散乱光の線に対する相対的方位角位置に関する情報が保存される。集束光は、垂直な線に対して異なる方位角で散乱した光線を表すそれぞれの信号に変換される。異常の有無および/または特徴は、この信号から判定される。あるいは、集束器38,52によって集束された光線は、予測されるパターン散乱の角度差に対応する角度の環状ギャップを有する空間フィルタによって濾波され、狭角および広角集束経路から得た信号は比較され、マイクロスクラッチと粒子との間を識別する。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】棒状ワークの曲がり角度を簡単に計測することができるのに加えて、棒状ワークの計測部位毎の曲がり角度を記録に残すことが可能になる三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】筒体や柱体等の棒状ワークの曲がり角度を計測するのに用いられる三次元計測治具であって、互いに合体してパイプWの外周に嵌合装着される一対の半円形治具構成体2,2を備え、一対の半円形治具構成体2,2には、レーザ光Lrの送受信を行うことで中心Rpの三次元座標が求められる球状のリフレクタRをスライド可能に保持する外向き溝2bが形成され、リフレクタRを保持する外向き溝2bは、パイプWの治具構成体2,2が装着される部位における断面を算出するのに必要な複数の位置を結んでパイプWの外周に沿ってそれぞれ形成されている。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
1 - 20 / 123
[ Back to top ]