
Fターム[2F065JJ24]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943)
Fターム[2F065JJ24]の下位に属するFターム
Fターム[2F065JJ24]に分類される特許
1 - 20 / 130
光学的位置検出装置
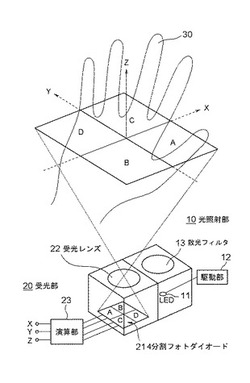
【課題】対象物体の2次元的な位置を1台の装置で光学的に検出することは困難であること。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
(もっと読む)
測定装置

【課題】加工面と加工工具のように、対象物体面に目的物体の先端を精度良く位置決めする位置検出装置を提供する。
【解決手段】対象物体面上の所望の位置に光源光束を合焦させて、その合焦点に目的物体先端を近づけたときに生じる反射光の強度変化と反射光束の光線方向分布の変化を検出し、目的物体を対象物体面に関して高い分解能で接近させ位置決めする。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】対象物体からの反射光を複数の受光素子で受光した際に各受光素子からの出力レベルの高低にかかわらず、対象物体の位置を精度よく検出することができる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12から検出光を出射した際、受光部13は対象物体Obからの反射光を第1受光素子131および第2受光素子132で受光する。信号処理部71は、第1受光素子131および第2受光素子132から出力された信号を加算した加算信号を位置検出部50に検出用信号として出力する際、加算出力が閾値以下のときには加算出力に第1倍率を乗じたレベルの信号を検出用信号として出力し、加算出力が閾値を超えるときには加算出力に第1倍率より小さな第2倍率を乗じたレベルの信号を検出用信号として出力する。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円環状の測定対象物に対してレーザトラッカーから見て反対側の周面の空間座標を測定することを可能にし、測定時の取扱いが簡単で、一人でも容易に直径を測定することができる測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgが設置されるターゲット設置部21と、ターゲット設置部21を測定対象物Wの円周方向に移動させる移動機構部22とを備える。移動機構部22は、測定対象物Wの測定対象周面である外周面Waに転接する第1の周面接触部材26と、測定対象物Wの内周面Wbに転接する第2の周面接触部材27と、測定対象物Wの上端面Wcに転接する端面接触部材28とを有する。第1の周面接触部材26は、ターゲット設置部21の中心を通る鉛直方向の軸O1回りに回転自在である。第1または第2の周面接触部材26,27を回転させる移動用回転駆動源41を設ける。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
不良検出システムの改良
【課題】パターンを形成したウェハの検査において、表面の内部もしくは表面上の異常の有無を判定できる表面検査法を提供する。
【解決手段】サンプル表面20aからの散乱光は表面20aに対して垂直な線に対して略対称の光を集束する集束器38,52によって集束される。集束光は、異なる方位角で経路へと導かれ、集束した散乱光の線に対する相対的方位角位置に関する情報が保存される。集束光は、垂直な線に対して異なる方位角で散乱した光線を表すそれぞれの信号に変換される。異常の有無および/または特徴は、この信号から判定される。あるいは、集束器38,52によって集束された光線は、予測されるパターン散乱の角度差に対応する角度の環状ギャップを有する空間フィルタによって濾波され、狭角および広角集束経路から得た信号は比較され、マイクロスクラッチと粒子との間を識別する。
(もっと読む)
透光性板状物体の厚さ測定装置
【課題】 透光性板状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス板Gの表面及び裏面で反射させて、反射光をラインセンサ55に導いてガラス板Gの厚さを測定する。測定用レーザ光は、Y軸線回りに回転可能なガルバノミラー45及びX軸線周りに回転可能なガルバノミラー51を介してガラス板Gに照射される。サーボ用レーザ光も、ガルバノミラー45,51を介してガラス板Gに照射され、反射光はガルバノミラー45,51を介して4分割フォトディテクタ66に導かれる。4分割フォトディテクタ66により、ガラス板Gの表面のX軸及びY軸線回りの傾きが検出され、この傾きに応じてガルバノミラー45,51を駆動するサーボ制御により、測定用レーザ光をガラス板Gに対して常に一定方向から入射させる。
(もっと読む)
変位測定装置、変位測定方法、光学用部材成形用金型の製造方法及び光学用部材
【課題】レーザ光の光量安定性、光量分布、光軸ぶれによる測定誤差を低減することのできる変位測定装置及び変位測定方法を提供する。
【解決手段】ビームスプリッタ3により、レーザ光源1から出射されたレーザ光を被測定物4に向かう第1分割レーザ光2a及び第2分割レーザ光2bに分割すると共に、第2受光素子6bにより第2分割レーザ光2bを受光する。そして、第2受光素子6bを、第2受光素子6bに入射する第2分割レーザ光2bの光量の割合と第1受光素子6aに入射する第1分割レーザ光2aの光量の割合とが一致する位置に配置し、位置演算器8は、第1受光素子6aの出力及び第2受光素子6bの出力の差に基づいてレーザ光源1に対する被測定物4の変位を演算する。
(もっと読む)
白色光走査干渉法を使用した膜厚測定を行うための方法及び装置
【課題】広帯域干渉法によって透明な膜の厚さを測定する方法を提供する。
【解決手段】広帯域干渉法によって膜のコレログラムを作成する工程と、コレログラムにフーリエ変換を適用して、フーリエ位相関数を得る工程と、フーリエ位相関数の線形成分を取り除く工程と、残りの非線形成分に第2積分変換を適用して非線形成分の積分振幅関数を得る工程と、積分振幅関数のピーク位置を特定する工程と、波長に依存する膜の屈折率を考慮して前記膜の厚さを前記ピーク位置の横座標の2倍値として決定する工程と、を含む。最後の2つの工程の代わりに、前記積分振幅関数のピーク位置を特定する工程と、前記ピーク位置の横座標の2倍値として膜の厚みを決定する工程と、を含んでもよい。
(もっと読む)
光学センサ及び画像形成装置
【課題】対象物の相対的な位置情報を短時間で精度良く検出することができる光学センサを提供する。
【解決手段】 面発光レーザアレイを含む光源11、非平行透明部材12、コリメートレンズ13、対物レンズ14、及び処理装置などを備えている。面発光レーザアレイの複数の発光部から射出された複数の光束は、Z軸方向に関して互いに異なる位置に集光される。そして、処理装置は、面発光レーザアレイの複数の発光部に一定の電圧を印加するとともに、発光部毎にセルフミキシング信号をプリンタ制御装置に出力する。プリンタ制御装置は、各発光部のセルフミキシング信号に基づいて、Z軸方向に関する記録紙との距離を求める。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
電磁波イメージング装置
【課題】測定表面が曲面であっても確実にその表面状態をイメージングする。
【解決手段】構造物の曲面に電磁波を複数の送信アンテナからそれぞれ放射する複数の送信回路と、構造物の構造物物の曲面で反射した電磁波を複数の受信アンテナでそれぞれ受信する複数の受信アンテナとを有し、送受信アンテナ13aと送受信回路13bとが一体化された複数のミリ波モジュール13をコンクリートポールCPの曲率に合わせて円弧状にアレイ化して配置する。
(もっと読む)
位置検出装置、位置検出方法、マイケルソン干渉計、およびフーリエ変換分光分析装置
【課題】簡素な構成からなる位置検出装置を得る。
【解決手段】所定の移動方向(矢印AR)に移動する板ばね部41(被測定物)の位置を検出する位置検出装置70は、受光部72Aと、受光部72Aに対向し受光部72Aに向けて測定光80を投光する投光部71Aとを備える。受光部72Aおよび投光部71Aは、受光部72Aおよび投光部71Aの間で移動する板ばね部41の移動方向(矢印AR)に対して、測定光80が斜めに交差するように配置される。板ばね部41の移動に伴って、測定光80の一部は板ばね部41に遮られるとともに、測定光80の残部は受光部72Aに到達する。受光部72Aが受光する測定光80の残部の受光量に基づいて、板ばね部41の位置が検出される。
(もっと読む)
モルホロジー補正印刷
【課題】非平坦な基体表面上に液滴を付着させるときの液滴配置誤差を減少させる。
【解決手段】基体の表面プロファイルを、液滴吐出装置の複数のノズルが配列する方向と平行な方向に沿って該基体を測る変位計測器のアレイを用いて、前記基体と前記液滴吐出装置との相対移動の方向に対して垂直な方向であって前記ノズルが配列する方向に沿った複数の位置で同時に、測定する。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
投光ビームの調整方法
【課題】シャインプルーフ光学系を用いた光学式変位センサにおいて、測定精度が安定した投光ビームの調整方法を提供する。
【解決手段】シャインプルーフ光学系を用いた光学式変位センサ10は、測定対象物に対して光を照射する投光モジュール9と、投光モジュール9からの光が測定対象物で反射して、反射光を受光面で受光する受光部13と、測定対象物と受光部13との間に位置して、反射光を受光面に結像する受光レンズ14とを備える。投光ビームの調整方法は、受光部13における像のサイズが、投光モジュール9を構成する投光レンズ12と測定対象物との距離によらず一定になるように光源11から照射される光の焦点位置を調整する。
(もっと読む)
半導体ウェハを検査するための方法および半導体ウェハのエッジを検査するための装置
【課題】半導体ウェハを検査するための方法および装置を提供する。
【解決手段】本発明は半導体ウェハを検査するための方法に関する。半導体ウェハのエッジをイメージング方法を用いて検査し、エッジ上の欠陥の位置および形状をこのようにして求める。加えて、その外縁がエッジから10mm以下である、半導体ウェハの平坦領域上の環状領域を、光弾性応力測定によって検査し、上記環状領域の中で応力を受けた領域の位置をこのようにして求める。欠陥の位置および応力を受けた領域の位置を互いに比較し、欠陥をその形状および光弾性応力測定の結果に基づいてクラスに分類する。本発明はまたこの方法の実施に適した装置に関する。
(もっと読む)
位置検出装置
【課題】 より少ない部品数でより高い検出精度を実現可能な位置検出装置を提供する。
【解決手段】 位置検出装置A1は、x方向に延びる読み取り領域を有し、上記読み取り領域において受光した光量に応じて信号を出力する受光手段4Aと、x方向と直交するy方向において検出基準面1を挟んで受光手段4Aと対向するように設置されており、上記x方向において上記読み取り領域の幅よりも長い領域を照明する帯状光束をy方向に向けて出射する光学ユニット3Aと、光学ユニット3Aに光を供給する光源手段21,22と、を備えており、受光手段4Aが出力する信号の値の偏りから検出基準面1に近接する検出対象物のx方向における位置を検出する。
(もっと読む)
1 - 20 / 130
[ Back to top ]