
国際特許分類[G01B11/245]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 輪郭または曲率の測定用 (3,716) | 複数の,固定された,同時に作動する変換器を用いるもの (241)
国際特許分類[G01B11/245]に分類される特許
21 - 30 / 241
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
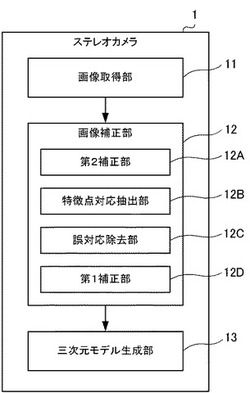
【課題】ズーム機能を用いた場合であっても、精度よく三次元モデルを作成する。
【解決手段】画像取得部11は、ペア画像を取得する。特徴点対応抽出部12Bは、画像取得部11が取得したペア画像のそれぞれの画像から、特徴点対応の組を抽出する。誤対応除去部12Cは、特徴点対応抽出部12Bによって抽出された特徴点対応の組において、垂直座標の差が所定値以上ある組を誤対応として除去する。第1補正部12Dは、誤対応が除去された後の特徴点対応の組の垂直座標に基づいて、画像取得部11が取得したペア画像を、三次元モデル作成に適した画像に補正する。三次元モデル生成部13は、画像取得部11が取得し、画像補正部12が補正したペア画像から、被写体の三次元モデルを生成する。
(もっと読む)
3次元計測方法

【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
突き合わせ溶接部の溶接品質評価装置
【課題】溶接線の径が多様に変化する筒形状部材であっても、計測機器の種類を増やすことなく、また、計測作業時間の増大を極力抑制する。
【解決手段】カメラ装置4が第1の撮影位置での溶接裏波8の全周にわたる撮影を終了すると、その装置本体41は移動ステージ42により第2の撮影位置に移動され、同様に、溶接裏波8の全周にわたる撮影を行う。このときの第1の撮影位置から第2の撮影位置までの距離Lは、第1の撮影位置におけるカメラ装置4と、撮影対象地点である溶接裏波8との間の距離Hに応じて設定される。そして、これら2個所の撮影位置で撮影された画像情報により、三角測量の原理に基づき溶接裏波8の3次元形状情報が演算され、この3次元形状情報に基づき突き合わせ溶接部の溶接品質が評価される。
(もっと読む)
画像処理装置および距離計測装置
【課題】撮影シーンに応じた立体表示を実現することが可能な技術を提供する。
【解決手段】画像処理装置は、撮影領域における被写体までの距離計測を、撮影領域に設定された予備計測位置において行って、距離情報を取得する第1距離計測部12と、第1距離計測部12で取得された距離情報に基づいて、撮影領域における被写体までの距離計測を追加して行うための本計測位置を撮影領域において設定する設定手段と、本計測位置において距離計測を行って、距離情報を取得する第2距離計測部13と、第1距離計測部12および第2距離計測部13で取得された距離情報に基づいて、視差情報を生成する視差情報生成部15と、視差情報に基づいて立体画像を生成する立体画像生成部16とを備える。
(もっと読む)
3次元計測装置及び3次元計測方法
【課題】1回の撮影で視野全体の3次元形状について、その特徴を漏れなく計測することができる3次元計測装置及び3次元計測方法を提供する。
【解決手段】 複数方向の複数の直線及び/又は曲線状のレーザラインにより構成されるレーザパタンをレーザ投影手段から計測対象物に投影し、該レーザパタンが投影された計測対象物を異なる方向から撮影して第1の画像及び第2の画像を取得し、この第1の画像及び前記第2の画像からレーザラインを抽出し、第1の画像のレーザライン点に対応する第2の画像のレーザライン点の対応点候補の3次元座標を夫々求め、該3次元座標を前記レーザ投影手段に設定される投影手段座標系に変換して前記レーザパタンが構成されているレーザパタン平面に射影した夫々の射影点が前記レーザパタン上にあるか否かを判定することにより、対応点を求める。
(もっと読む)
スキャナ装置および物体の三次元形状測定装置
【課題】コヒーレント光源を用いて線状パターンの投影を行いつつ、投影面でのスペックルの発生を抑制する
【解決手段】レーザビームL50を、光ビーム走査装置60によって反射させ、ホログラム記録媒体45に照射する。ホログラム記録媒体45には、走査基点Bに収束する参照光を用いて線状散乱体の像35がホログラムとして記録されている。光ビーム走査装置60は、レーザビームL50を走査基点Bで屈曲させてホログラム記録媒体45に照射する。このとき、レーザビームの屈曲態様を時間的に変化させ、屈曲されたレーザビームL60のホログラム記録媒体45に対する照射位置を時間的に変化させる。ホログラム記録媒体45からの回折光L45は、ステージ210の受光面R上に線状散乱体の再生像35を生成する。受光面Rに物体を載置すると、ホログラム再生光により線状パターンが投影されるので、その投影像を撮影して物体の三次元形状測定を行う。
(もっと読む)
3次元形状取得装置および3次元形状取得プログラム
【課題】複数の画像から高い精度で奥行き情報を生成する3次元形状取得装置および3次元形状取得プログラムを提供する。
【解決手段】3次元形状取得装置は、基準画像および参照画像からブロック画像を、それぞれ基準ブロック画像および参照ブロック画像として切り出すブロック画像切出手段と、基準ブロック画像における所定の色を基準色として特定し、基準ブロック画像および参照ブロック画像において、基準色に所定の範囲内で類似する色の画素を対象領域として抽出する対象領域抽出手段と、基準ブロック画像における所定の色を対象領域の背景をマスクする置換色として特定し、基準ブロック画像および参照ブロック画像において、対象領域に含まれない画素の色を置換色で置き換える色置換手段と、位相限定相関法により視差を計測する視差計測手段と、視差計測手段が計測した視差から3次元座標位置を生成する3次元座標位置生成手段とを備えることを特徴とする。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】表面の凹凸、輪郭線近傍の欠陥等の存在を高い精度で検出することができ、良品判定を確実に行うことができる画像処理装置、画像処理方法、及びコンピュータプログラムを提供する。
【解決手段】撮像手段で撮像された、良品に関する複数の第一の多値画像を取得し、取得した第一の多値画像の画素ごとに、撮像手段からの距離を濃淡値に変換した第一の距離画像を生成する。生成した第一の距離画像の画素ごとの濃淡値の、良品判定を行うための分布範囲を算出する。判定対象物に関する第二の多値画像を取得し、取得した第二の多値画像の画素ごとに、撮像手段からの距離を濃淡値に変換した第二の距離画像を生成する。生成した第二の距離画像の画素ごとの濃淡値が対応する分布範囲に含まれているか否かを判断する。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
歯科用補綴物計測加工システム
【課題】非接触で口腔内から患者、歯科医師の負担を軽減させながら直接歯科用補綴物の三次元形状データを取得して、正確な歯科補綴物を製造する。
【解決手段】被写口腔内物を静止的に撮影する画像データ化手段、計測時に被計測物の三次元形状が計測可能な状態で前記画像データ化手段の位置が固定された固定部位を持ち口腔内に挿入可能な大きさを持つ支持体、前記画像データ化手段で得られた撮影情報から、被写口腔内物の三次元形状を得る三次元形状取得手段を有する。
(もっと読む)
21 - 30 / 241
[ Back to top ]