
国際特許分類[G01B11/245]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 輪郭または曲率の測定用 (3,716) | 複数の,固定された,同時に作動する変換器を用いるもの (241)
国際特許分類[G01B11/245]に分類される特許
31 - 40 / 241
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
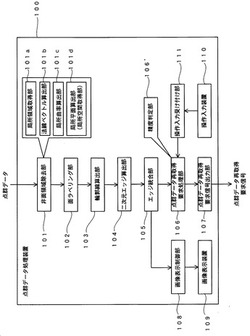
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部103と、精度を高めるために点群データの再取得の要求を行う点群データ再取得要求処理部106を備えている。
(もっと読む)
車形検出装置及び同装置を備えた洗車機

【課題】本発明の課題は、洗浄による飛散水や湯気の発生あるいは素子の汚れ等によって光量が不足した場合であっても、車形データを作成することができる車形検出装置及びこの装置を備えた洗車機を提供するものである。
【解決手段】発光部5aにおける隣接する2つの発光素子La・La+1を同時に発光させ、その一方の発光素子Laと水平に対向する1つの受光素子Raで受光する第1の光軸Bdと、同じく2つの発光素子La・La+1を同時に発光させ、その他方の発光素子La+1のと水平に対向する1つの受光素子Ra+1で受光する第2の光軸Beとを形成し、各素子毎に各光軸で車体検出する強光検出モードを実行可能にした。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】異なる視点からの撮影画像である左画像と右画像を適用した被写体距離の算出を確実に行うための変換パラメータを算出する装置および方法を実現する。
【解決手段】異なる視点から撮影された左画像と右画像の射影変換を実行する射影変換処理を実行して、射影変換のなされた射影変換左画像と射影変換右画像を適用したステレオマッチングによるエラー評価値を取得する。射影変換左画像と射影変換右画像の画像回転角度情報とエラー評価値の対応情報に基づいてエラー評価値が最小となる画像回転角度を求め、その画像回転角度に対応する射影変換パラメータを算出する。この処理により、ステレオマッチングにおいてエラーの発生可能性が低減された最適な射影変換パラメータを算出することができる。
(もっと読む)
微小流動場撮影装置
【課題】装置又は部品の加工誤差又は製作誤差や、流体固有の屈折率の影響等に起因する画像データ取得の困難性を解消し、マイクロスケールの微小流動場の流体速度等を解析するために有効な画像を単一の撮像装置によって取得する。
【解決手段】微小流動場撮影装置は、微小流動場(M)の可視化流体の粒子画像を撮像する撮像装置(11)と、撮像装置に光学的に連結した顕微鏡(12)とを備える。複数の第1反射面(17,17a)と、第1反射面の各々に対面し且つ顕微鏡の光路に配置された複数の第2反射面(16,16a)とが顕微鏡と微小流動場との間に配置される。微小流動場撮影装置は、第1又は第2反射面の角度を調整する角度調整機構と、第1又は第2反射面の位置を調整する位置調整機構とを備える。微小流動場の粒子の反射光が第1及び第2反射面によって反射して顕微鏡内の光路に入射し、異なる視点から得られた同一粒子の複数の像が撮像装置の単一の結像面に結像する。
(もっと読む)
デプスマップ出力装置
【課題】被写体の遠近が急激に変化する箇所においても、被写体までの正確な距離を算出することが可能なデプスマップ出力装置を提供する。
【解決手段】被写体像を所定の結像面に結像させる撮影レンズ11と、結像面の近傍に二次元状に配列されたマイクロレンズMLを有するマイクロレンズアレイ12と、複数のマイクロレンズMLの各々に対応して配置される受光素子配列30と、横方向に配列された複数の横レンズ列を選択しその各々について、当該横レンズ列を構成するマイクロレンズMLの各々に対応する受光素子配列30の出力を演算し、当該横レンズ列の中央部のマイクロレンズMLのデフォーカス量すると共に、当該デフォーカス量を二次元状に配列したデータである横由来デプスマップを作成し、同様に縦方向について縦由来デプスマップを作成し、横由来デプスマップと縦由来デプスマップとを合成し最終的なデプスマップを出力する合成処理を実行する制御回路40とを備えるステレオ撮像装置1。
(もっと読む)
3次元位置測定装置
【課題】 画像法の3次元位置測定装置において、測定可能な測定対象物の大きさ、及び測定対象物までの距離の範囲を拡げる。
【解決手段】 撮影視野の仰角、方位角、及び画角の設定を変更する機能を有するPTZカメラ1、2と、PTZカメラ1、2の撮影視野の設定情報及び撮影画像情報に基づいて、PTZカメラ1、2が撮影した測定対象点の3次元座標を算出する3次元座標算出手段34とを有する。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】ターゲットTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して撮影画像F3を得る撮影部4、撮影部4で撮影された撮影画像F3からターゲットTの特徴を検出するターゲット特徴検出部62、撮影画像F3におけるターゲットTの特徴に関する所定の許容条件を記憶する許容条件記憶部54、撮影画像F3が所定の許容条件を満たすか否かを判定する許容条件判定部7、許容条件判定部7が所定の許容条件を満たさないと判定した場合には、所定の許容条件を満たすようにターゲットTの特徴を変更して投影用ターゲット画像F1を補正する画像処理部8とを備える。
(もっと読む)
ステレオ画像においてオクルージョンをハンドリングするための方法
【課題】オクルージョンをハンドリングするための新規の方法を提供する。
【解決手段】オクルードされたピクセル及び可視ピクセルを含むステレオ画像において、オクルージョンは、まず、前記オクルードされたピクセルについて、初期サポート関数と、オクルージョンマップと、前記ステレオ画像内の前記オクルードされたピクセルの近傍の前記可視ピクセルの視差とを使用して、初期視差値及び該初期視差値のサポートを求めることによってハンドリングされる。次に、前記オクルードされたピクセルについて、反復的なサポート及び決定プロセスにおいて、初期視差値と、最終サポート関数と、正規化関数とを使用して、最終視差値及び該最終視差値のサポートが求められる。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】状況に応じて、3次元計測のためのパターン光の点灯及び非点灯を適切に切り替えることが可能なロボット装置及びロボット装置の制御方法を提供する。
【解決手段】外部の環境にパターン光を照射する照射部と、外部の環境を撮像して画像を取得する撮像部と、外部の環境を認識する外部環境認識部と、画像の取得状態に基づいて、パターン光の照射が必要であると判断したとき照射部を点灯に制御する照射判断部と、外部の環境に基づいて、パターン光の照射が不要である又はパターン光の照射を強制停止すべきであると判断したとき照射部を非点灯に制御する消灯判断部とを備える。
(もっと読む)
タイヤ形状計測装置
【課題】実際に路面上でタイヤが転動状態にあるときのトレッド部のブロックの変形状態を正確に測定することができるタイヤ形状計測装置を提供する。
【解決手段】カメラユニット13は、クロスローラリング(ベアリング)を備えた連結手段17を介して、車輪を転動可能にして車輪の車軸に取り付けられ、車輪を構成するタイヤ11のブロック部を撮像する。レーザ変位計21は、路面との距離を測定する。リニアアクチュエータ22は、レーザ変位計21の測定結果を用いて、カメラユニット13と路面との距離を一定に保つ。
(もっと読む)
31 - 40 / 241
[ Back to top ]