
国際特許分類[G01B21/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | このサブクラスの他のグループの,個別の形式の測定手段に適合しない測定装置またはその細部 (1,964)
国際特許分類[G01B21/00]の下位に属する分類
長さ,幅または厚さの測定用 (236)
直径測定用 (41)
離隔対象物間の距離または間隙測定用 (35)
深さ測定用 (5)
輪郭または曲率測定用,例.プロフィル測定 (409)
角度またはテーパ測定用;軸の心合せ検査用 (255)
面積測定用 (5)
表面の粗さまたは不規則性測定用 (236)
固体の変形測定用 (88)
国際特許分類[G01B21/00]に分類される特許
111 - 120 / 654
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
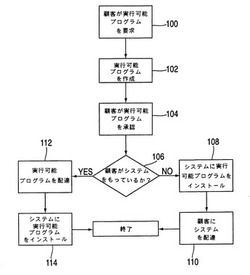
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
鉄道軌道の曲率・曲線半径測定方法

【課題】測定範囲を低速域にまで広げることができる鉄道軌道の曲率・曲線半径測定方法を提供する。
【解決手段】鉄道軌道の曲率・曲線半径測定方法において、軌道検測車に角度計をセットし、この角度計により計測した情報に基づいて鉄道軌道の2点の接線の相対角度を求め、一方、前記軌道検測車に車輪回転計をセットし、この車輪回転計により計測した情報に基づいて前記鉄道軌道の2点間の距離を求め、前記鉄道軌道の2点間の相対角度及び前記鉄道軌道の2点間の距離を所与の計算式に代入して計算結果を求め、この計算結果にローパスフィルタ処理を施す。
(もっと読む)
移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法
【課題】位置センサを用いた移動部材の移動情報の検出精度を向上させることができる移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】ステップS11では、レンズをZ軸方向及びθx方向に移動させると共に、複数の位置で位置センサを用いてレンズのY軸移動量dを検出させ、さらに、Y軸移動量dを検出したときのレンズのZ軸方向に関する位置及び傾斜角を検出させる。そして、ステップS12,13では、位置センサのスケールの傾き角度θを算出させる。その後、算出した傾き角度θに基づいて、位置センサを用いてレンズのY軸移動量dが補正される。
(もっと読む)
慣性測定法による軌道検測装置の低速時精度補償方法及びその装置
【課題】 軌道検測車の低速走行時における慣性測定法の精度低下を補償し、測定下限速度を引き下げることができる慣性測定法による軌道検測装置の低速時精度補償方法及びその装置を提供する。
【解決手段】 慣性測定法による軌道検測の低速時精度補償装置において、慣性測定で得られる加速度・角度・変位の信号を位相補償・波形変換器6で得て、軌道検測車1の低速時には位相補償・波形変換器6から分岐して低速時精度補償部8によって演算し、軌道検測車1の低速時における出力として軌道狂いを計測する。
(もっと読む)
基準器、及び座標測定機
【課題】定盤の自由な位置に設置することができ、座標測定機の製造コストを低減させることができる基準器の提供。
【解決手段】基準器は、三次元測定機に測定される基準器本体と、基準器本体を支持する台座4とを備える。台座4は、定盤11の平面11Aに当接する当接面421を有する円盤状に形成されている。当接面421には、断面円環状の凹部422が形成されるとともに、凹部422には、空気を吸気するための吸気孔423が形成されている。また、台座4は、吸気孔423に連通する吸気用流路43を有し、吸気用流路43を介して吸気孔423から空気が吸気されることで定盤11に対して吸着することができる。
(もっと読む)
測定物保持装置及び方法並びに平面度測定装置
【課題】測定物を保持する際に測定物が自重の撓みにより変形されることのない測定物保持装置を提供する。
【解決手段】測定物11の平面度測定に用いられる測定物保持装置20であって、測定物11が載置される載置面11aを有する載置台40と、載置台40に、載置面4002から突出して測定物11を下方から複数箇所で支持し載置面4002からの高さが変更可能に設けられた複数の測定物支持部材60と、各測定物支持部材60が測定物11に対して均一な接触圧力で接するように各測定物支持部材60の載置面4002からの高さを変更する制御手段80とを備える構成にした。
(もっと読む)
UO鋼管溶接部ビード位置検出装置
【課題】UO鋼管の溶接部ビード位置を、安価で、精度よく検出することが可能なUO鋼管溶接部ビード位置検出装置を提供する。
【解決手段】UO鋼管1の軸線直下に配置されたタッチローラ6を当該UO鋼管1の外周面に当接した状態で、ターニングロール3によってUO鋼管1を周方向に回転させると、UO鋼管1の溶接部ビード2がタッチローラ6を乗り越える前後で2個1対のレーザ式変位計9の出力が変動するため、それらのレーザ式変位計9の出力変動から溶接部ビード2の入側と出側の位置を求め、その中間を溶接部ビード2の位置として算出することができる。また、2個1対のレーザ式変位計9の出力の微分値の絶対値が所定値以上になる位置を溶接部ビード2の入側又は出側の位置とすることで、検出精度を向上することができる。
(もっと読む)
可搬型の関節アーム座標測定機の移動を改善するための傾斜計の使用
第1の位置から第2の位置に可搬型の関節アーム座標測定機(AACMM)を移動する方法において、AACMMは、第1の位置で第1の原点および第1の基準系を有し、第2の位置で第2の原点および第2の基準系を有する、方法であって、可搬型のAACMMが第1の位置および第2の位置のそれぞれにあるようにして、重力ベクトルに対して各方向がほぼ直交する2つの直交方向に沿った可搬型のAACMMの傾斜の量を測定するステップと、可搬型のAACMMが第1の位置にあるようにして第1の目標および第2の目標を測定して、第1の基準系においてx、y、およびz座標の第1の組ならびにx、y、およびz座標の第2の組を取得するステップと、可搬型のAACMMが第2の位置にあるようにして第1の目標および第2の目標を測定して、第2の基準系においてx、y、およびz座標の第3の組ならびにx、y、およびz座標の第4の組を取得するステップと、第1の基準系に対する第2の原点のx、y、およびz座標を発見するステップであって、第2の原点のx、y、およびz座標は、x、y、およびz座標の第1、第2、第3、および第4の組を使用するが、第1の位置および第2の位置でAACMMによって測定された第3の目標のさらなるx、y、およびz座標は使用せずに発見される、ステップとを含む方法。  (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された環境レコーダ
手動で位置付けることが可能な関節アームと、AACMMの第1の端部に装着された測定デバイスと、位置信号を受信するための、および測定デバイスの位置に対応するデータを提供するための電子回路とを含む可搬型の関節アーム座標測定機(AACMM)。AACMMは、環境レコーダをさらに含む。環境レコーダは、パラメータの値を出力するためのセンサと、メモリと、方法を実施するために環境レコーダによって実行可能な論理とを含む。方法は、パラメータの値を監視するステップと、パラメータの値がプログラム可能な閾値の外にあることを判定するステップとを含む。パラメータの値およびタイムスタンプが、パラメータの値がプログラム可能な閾値の外にあると判定されることに応答してメモリに記憶される。メモリの内容が、電子回路に送信される。  (もっと読む)
(もっと読む)
座標測定機用ディスプレイ
基部を有する可搬型の関節アーム座標測定機が、提供される。カバーが、閉じた位置と開いた位置の間を動くように基部に回転可能なように結合される。ディスプレイが、カバー内に配置される。ディスプレイは、筐体の片側に配置された、タッチスクリーン面などのスクリーン面を含む。スクリーン面は、閉じた位置において基部に近接し、開いた位置において基部に対して斜めに配置される。 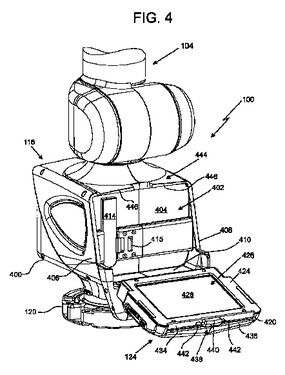 (もっと読む)
(もっと読む)
111 - 120 / 654
[ Back to top ]