
国際特許分類[G01B21/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | このサブクラスの他のグループの,個別の形式の測定手段に適合しない測定装置またはその細部 (1,964)
国際特許分類[G01B21/00]の下位に属する分類
長さ,幅または厚さの測定用 (236)
直径測定用 (41)
離隔対象物間の距離または間隙測定用 (35)
深さ測定用 (5)
輪郭または曲率測定用,例.プロフィル測定 (409)
角度またはテーパ測定用;軸の心合せ検査用 (255)
面積測定用 (5)
表面の粗さまたは不規則性測定用 (236)
固体の変形測定用 (88)
国際特許分類[G01B21/00]に分類される特許
141 - 150 / 654
非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置
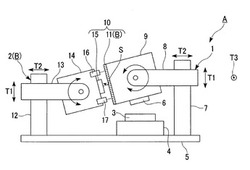
【課題】測定対象物の位置・姿勢を直接測定して、精度の高い位置・姿勢の測定及び制御を可能にするとともに、測定対象物の位置・姿勢を非接触で測定することでモデル化を簡略にし、モデル化に起因した誤差を小さくすることを可能にした非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置を提供する。
【解決手段】エンコーダ10の位置検出器15と距離計16、17が取り付けられた測定装置2と、測定対象物9に取り付けられたエンコーダ10のスケール11とを備えてなる非接触型位置・姿勢測定装置Bを用い、距離計16、17によって位置検出器15とスケール11の間隔及び平行度を測定し、間隔と平行度が一定となるように測定装置2のマニピュレータ13を制御し、測定装置2の位置情報と距離計16、17の計測値とエンコーダ10の計測値とを用いて測定対象物9の位置と姿勢を測定する。
(もっと読む)
計測装置

【課題】ワークの大きさに関係なく測定手段の位置精度を向上させることができる計測装置を提供することを課題とする。
【解決手段】計測装置10Aでは、測定手段50が車体フレーム65よりも地面11に近い位置に設置されている。すなわち、測定手段50は車体フレーム65よりも低位置にある。
【効果】測定手段50の設置高さが車体フレーム65の大きさに影響を受けることがない。また、低位置にある測定手段50は、車体フレーム65よりも高位置にある場合に比べて、移動機構20で測定手段50を移動させたときに生じる測定手段50の振動を容易に抑えることができる。したがって、車体フレーム65の大きさに関係なく測定手段50の位置精度が向上する。
(もっと読む)
円筒形回転装置を測定して位置合わせする方法
本発明は、例えばキルンやドラムなどの円筒形又は他の回転対称形の回転装置を測定して位置合わせするための方法に関する。測定及び位置合わせの対象となる装置は、シェルと、少なくとも1つの支持リングとを有する。本発明による方法に関して重要なのは、回転装置が作動状態で回転しているときに、回転物体のシェルの表面上測定点が、同じ円周ライン上において、各支持リングの軸線方向両側で測定されることである。測定された点から回帰円が計算され、計算された円の中心点が決定され、各支持リングの両側で計算された円の中心点の間の直線とその中心点が決定される。シェルの中心線の基準直線が計算され、決定されたシェルの中心点を、計算された基準線へ移動させることによって、物体のシェルが真直ぐになるように位置合わせされる。  (もっと読む)
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
軌道検測のための検出器ユニット
【課題】
光学的変位センサを搭載する検出器ユニットを堅牢な構造にしなくても台車に取付けることが可能で一般の営業車両にも取付けることができるように小型軽量化した軌道検測のための検出器ユニットを提供することにある。
【解決手段】
この発明は、レールの横断方向、すなわち、台車の横梁方向に沿って設けた収納ケースに内装する内装フレームを水平板フレームとこれから起立する垂直板フレームで構成し、光学的変位センサは垂直板フレームの両端にそれぞれ設ける。内装フレームの両端を緩衝部材を介して収納ケースに取付け、質量が大きいジャイロを水平板フレームの中央部付近に搭載する。
(もっと読む)
改良された関節式アーム
関節式アームCMMは、複数の伝達部材と、少なくとも2つの伝達部材を互いに接続する複数の関節部材と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。 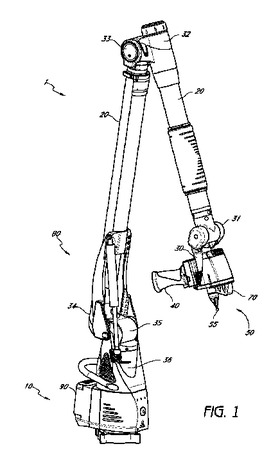 (もっと読む)
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
リニアモータ位置検出システム
【課題】測長距離の制限を受けることがないと共にリニアモータの能力を十分に発揮させて制御時間の短縮を図ることができるリニアモータ位置検出システムを提供する。
【解決手段】リニアモータ5により移動されるテーブル4の直線運動をラック12とピニオンギア13により回転運動に変換するようにしたので、直線運動系での検出は有限目盛りであるのに対して回転運動系での検出は無限目盛りとなり、理論的には直線運動系の測長距離が無限であっても、直線運動系の測長距離を回転運動系の測長距離に容易に変換することができ、測長距離の変更に容易に対応することができる。
(もっと読む)
141 - 150 / 654
[ Back to top ]